再探Tensor类:
第二节中我们编写的Tensor类其实并不能满足我们的使用需要,我们将在这一节以代码阅读的方式来看看一个完全版本的Tensor应该具备怎样的要素,同时我们对Tensor类的分析来看看在C++中一个设计好的类应该是怎么样的。
Tensor<float>::Tensor(uint32_t channels, uint32_t rows, uint32_t cols) {
data_ = arma::fcube(rows, cols, channels);
if (channels == 1 && rows == 1) {
this->raw_shapes_ = std::vector<uint32_t>{cols};
} else if (channels == 1) {
this->raw_shapes_ = std::vector<uint32_t>{rows, cols};
} else {
this->raw_shapes_ = std::vector<uint32_t>{channels, rows, cols};
}
}
在这里,raw_shape记录的是另外一个方面的形状信息,主要用于review和flatten层中。
举一个简单的例子,当Tensor将一个大小为(2,16,1)的Tensor reshape到(32,1,1)的大小时,raw_shapes变量会被记录成(32). 将一个大小为(2,16, 2)的Tensor reshape到(2, 64)的大小时,raw_shapes会被记录成(2,64).
那这样做的目的是什么呢?原来的
Tensor不能在逻辑上区分当前的张量是三维的、二维的还是一维的,因为实际的数据存储类arma::fcube总是一个三维数据。所以我们要区分他的逻辑结构,就需要这么一个raw_shape
列优先的Reshape
void Tensor<float>::ReRawshape(const std::vector<uint32_t>& shapes) {
CHECK(!this->data_.empty());
CHECK(!shapes.empty());
const uint32_t origin_size = this->size();
uint32_t current_size = 1;
for (uint32_t s : shapes) {
current_size *= s;
}
CHECK(shapes.size() <= 3);
CHECK(current_size == origin_size);
if (shapes.size() == 3) {
this->data_.reshape(shapes.at(1), shapes.at(2), shapes.at(0));
this->raw_shapes_ = {shapes.at(0), shapes.at(1), shapes.at(2)};
} else if (shapes.size() == 2) {
this->data_.reshape(shapes.at(0), shapes.at(1), 1);
this->raw_shapes_ = {shapes.at(0), shapes.at(1)};
} else {
this->data_.reshape(shapes.at(0), 1, 1);
this->raw_shapes_ = {shapes.at(0)};
}
}
我们再来分析一下这个函数,如果传入的shapes是1维的,就相当于将数据展开为(elem_size,1,1),并将逻辑维度赋值为1. 如果传入的shapes,相当于将数据展开为(shapes.at(0), shapes.at(1), 1). 我们来看看下面的这个图例:
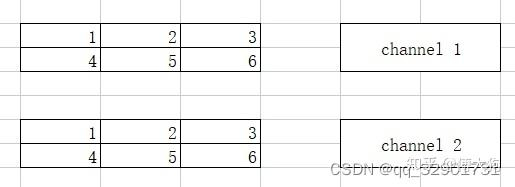
如果把上面的(2,2,3)展平为一维的,那就应该是如下图所示:

而且这也是arma:cube的默认排序(列排序)
行优先的Reshape
那如果我们在某些情况下需要行优先的Reshape呢?
void Tensor<float>::ReView(const std::vector<uint32_t>& shapes) {
CHECK(!this->data_.empty());
const uint32_t target_channels = shapes.at(0);
const uint32_t target_rows = shapes.at(1);
const uint32_t target_cols = shapes.at(2);
arma::fcube new_data(target_rows, target_cols, target_channels);
const uint32_t plane_size = target_rows * target_cols;
for (uint32_t c = 0; c < this->data_.n_slices; ++c) {
const arma::fmat& channel = this->data_.slice(c);
for (uint32_t c_ = 0; c_ < this->data_.n_cols; ++c_) {
const float* colptr = channel.colptr(c_);
for (uint32_t r = 0; r < this->data_.n_rows; ++r) {
const uint32_t pos_index =
c * data_.n_rows * data_.n_cols + r * data_.n_cols + c_;
const uint32_t ch = pos_index / plane_size;
const uint32_t row = (pos_index - ch * plane_size) / target_cols;
const uint32_t col = (pos_index - ch * plane_size - row * target_cols);
new_data.at(row, col, ch) = *(colptr + r);
}
}
}
this->data_ = new_data;
}
我们只能通过位置计算的方式来对逐个元素进行搬运,const uint32_t plane_size = target_rows * target_cols;来计算行数和列数相乘的积。
const uint32_t pos_index = c * data_.n_rows * data_.n_cols + r * data_.n_cols + c_; 得 到调整前的元素下标,随后我们计算调整后的通道下标位置:ch = pos_index / plane_size,plane_size就是和一面,一行乘一列。同理计算row,col等调整位置后的行、列坐标。
计算图关系
内容回顾
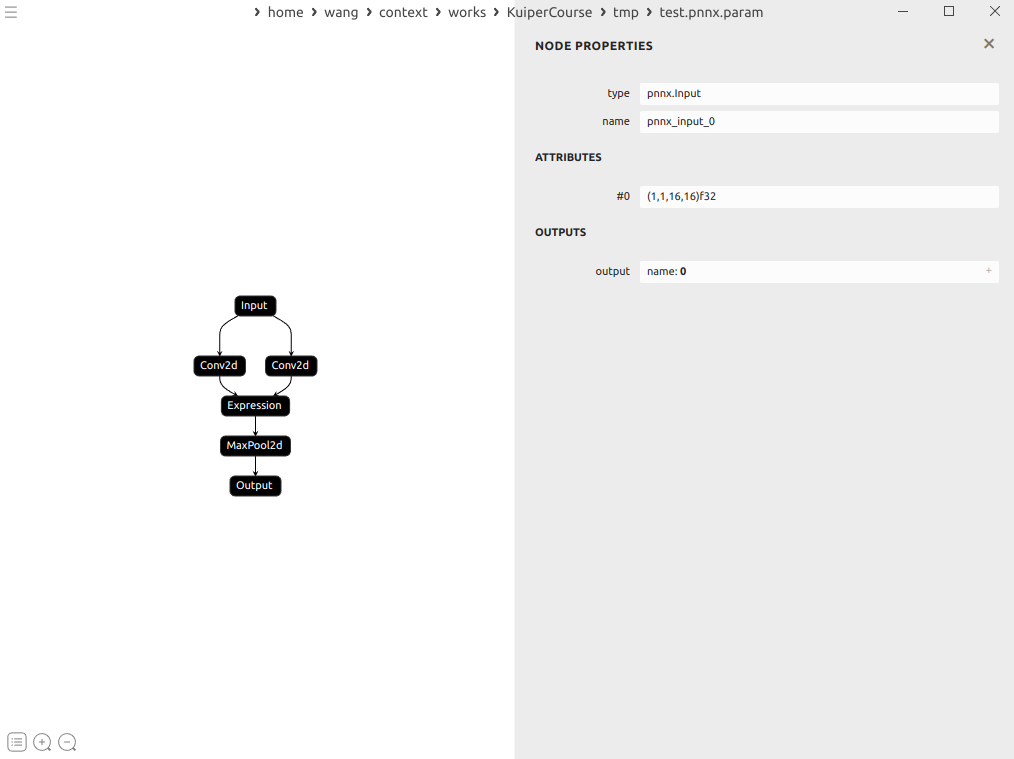
我们在回顾一下之前的内容,我们根据pnnx计算图得到了我们的计算图,我们的计算图由两部分组成,分别是kuiper_infer::RuntimeOperator和kuier_infer::RuntimeOperand.
但是作为一个计算图,计算节点之间往往是有连接的,包括从input operator到第一个计算节点再到第二个计算节点,直到最后的输出节点output operator,我们再来回顾一下这两个数据结构的具体定义:
struct RuntimeOperator {
int32_t meet_num = 0; /// 计算节点被相连接节点访问到的次数
~RuntimeOperator() {
for (auto ¶m : this->params) {
if (param.second != nullptr) {
delete param.second;
param.second = nullptr;
}
}
}
std::string name; /// 计算节点的名称
std::string type; /// 计算节点的类型
std::shared_ptr<Layer> layer; /// 节点对应的计算Layer
std::vector<std::string> output_names; /// 节点的输出节点名称
std::shared_ptr<RuntimeOperand> output_operands; /// 节点的输出操作数
std::map<std::string, std::shared_ptr<RuntimeOperand>> input_operands; /// 节点的输入操作数
std::vector<std::shared_ptr<RuntimeOperand>> input_operands_seq; /// 节点的输入操作数,顺序排列
std::map<std::string, std::shared_ptr<RuntimeOperator>> output_operators; /// 输出节点的名字和节点对应
std::map<std::string, RuntimeParameter *> params; /// 算子的参数信息
std::map<std::string, std::shared_ptr<RuntimeAttribute> > attribute; /// 算子的属性信息,内含权重信息
};
- std::map<:string std::shared_ptr>> output_operators; 我们重点来看这个定义,它是当前这个计算节点的下一个计算节点,当数据在当前
RuntimeOperator上计算完成之后,系统会读取output_operators中准备就绪的算子并开始执行。 - std::map<:string std::shared_ptr>> input_operands; 是当前计算节点所需要的输入,它往往来自于上一个
RuntimeOperator的输入。 - std::shared_ptr output_operands; 是当前节点计算得到的输出,它是通过当前的
op计算得到的。
具体的流程是这样的,假设我们在系统中有三个RuntimeOperators,分别为op1,op2和op3. 这三个算子的顺序是依次执行的,分别是op1-->op2-->op3.
- 当我们执行第一个算子
op1的时候,需要将来自于图像的输入填充到op1->input_operands中。 - 第一个算子
op1开始执行,执行的过程中读取op1->input_operands并计算得到相关的输出,放入到op1->output_operands中 - 从
op1的output_operators中读取到ready的op2 - 第二个算子
op2开始执行,执行的过程读取op1->output_operands并拷贝op2->input_operands中,随后op2算子开始执行并计算得到相关的输出,放入到op2->output_operands中。
所以我们可以看到者之间是有一个图关系的,那我们来看一下他是怎么构建这样一个图关系的
怎样构建图关系:
/ 构建图关系
for (const auto ¤t_op : this->operators_) {
const std::vector<std::string> &output_names = current_op->output_names;
for (const auto &next_op : this->operators_) {
if (next_op == current_op) {
continue;
}
if (std::find(output_names.begin(), output_names.end(), next_op->name) !=
output_names.end()) {
current_op->output_operators.insert({next_op->name, next_op});
}
}
}
```
- **const std::vector\<std::string> &output_names = current_op->output_names;** 存放的是当前`op`的`output_names`,`output_names`也就是当前算子的后一层算子的名字。对于`op1`,它的`output_names`就是`op2`的name.
- **const auto &next_op : this->operators_** 我们遍历整个图中的`RuntimeOperators`,如果遇到`next_op`的name和当前`current_op->output_name`是一致的,那么我们就可以认为`next_op`是当前`op`的下一个节点之一。
- **current_op->output_operators.insert({next_op->name, next_op});** 将`next_op`插入到`current_op`的下一个节点当中。
- 这样一来,当`current_op`执行完成之后就取出`next_op`,并将当前`current_op`的输出`output_opends`(输出)拷贝到`next_op`的`input_operands`(输入)中。因为在初始化的时候就已经约定好了op1的输出是op2,所以只要在接下来的点中不停地寻找op2就好了,找到了之后就把它insert到output_operators里面.这个output_operators是一个map,就可以让输出节点的名字和节点对应。
这么一个计算图也得有输入输出节点吧
作者:傅大狗
链接:https://zhuanlan.zhihu.com/p/604613883
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
this->input_operators_maps_.clear();
this->output_operators_maps_.clear();
for (const auto &kOperator : this->operators_) {
if (kOperator->type == "pnnx.Input") {
this->input_operators_maps_.insert({kOperator->name, kOperator});
} else if (kOperator->type == "pnnx.Output") {
if (kOperator->name == output_name) {
this->output_operators_maps_.insert({kOperator->name, kOperator});
} else {
LOG(FATAL) << "The graph has two output operator!";
}
} else {
std::shared_ptr<Layer> layer = RuntimeGraph::CreateLayer(kOperator);
CHECK(layer != nullptr) << "Layer create failed!";
if (layer) {
kOperator->layer = layer;
}
}
}
- kOperator->type == "pnnx.Output" 找到
this->operators中的输出节点,但是目前Kuiperinfer只支持一个输出节点,其实也可以多输出,作为一个教学框架我实在不想支持这种corner case - 同理: kOperator->type == "pnnx.Input" 来找到图中,也就是op list中的输入节点
就是在op3结束之后,我们还要把op3的output_operand复制到输出节点的input_operand里面
初始化输入
struct RuntimeOperand {
std::string name; /// 操作数的名称
std::vector<int32_t> shapes; /// 操作数的形状
std::vector<std::shared_ptr<Tensor<float>>> datas; /// 存储操作数 为什么是vector,因为是一个batch,如果batch是2的话,那就存储的是两个
RuntimeDataType type = RuntimeDataType::kTypeUnknown; /// 操作数的类型,一般是float
};
可以看到这里的RuntimeOperand::datas就是存储具体数据的地方,我们初始化输入输出的空间也就是要在推理之前先根据shapes来初始化好这里datas的空间
代码位于runtime_ir.cpp的InitOperatorInputTensor中 RuntimeGraphShape::InitOperatorInputTensor(operators_) 这个函数的输入是operator list, 所以将在这个函数中对所有的op进行输入和输出空间的初始化。
- 得到一个
op的输入空间input_operands
const std::map<std::string, std::shared_ptr<RuntimeOperand>> &
input_operands_map = op->input_operands;
- 如果初始的是空就continue
for (const auto &op : operators) {
if (op->input_operands.empty()) {
continue;
} - 得到
input_operands中记录的数据应有大小input_operand_shape和存储数据的变量input_datas
auto &input_datas = input_operand->datas;
CHECK(!input_operand_shape.empty());
const int32_t batch = input_operand_shape.at(0);
CHECK(batch >= 0) << "Dynamic batch size is not supported!";
CHECK(input_operand_shape.size() == 2 ||
input_operand_shape.size() == 4 ||
input_operand_shape.size() == 3)
- 我们需要根据
input_operand_shape中记录的大小去初始化input_datas. 而input_operand_shape可能是三维的,二维的以及一维的,如下方所示 - input_operand_shape : (batch, elemsize) 一维的
- input_operand_shape : (batch, rows,cols) 二维的
- input_operand_shape : (batch, rows,cols, channels) 三维的
如果当前input_operand_shape是二维的数据,也就是说输入维度是(batch,rows,cols)的. 我们首先对batch进行遍历,对一个batch的中的数据input_datas= op->input_operand(输入)进行初始化。
input_datas.resize(batch);
for (int32_t i = 0; i < batch; ++i) {
}
在for循环内,它会调用如下的方法去初始化一个二维的张量:
input_datas.at(i) = std::make_shared<Tensor<float>>(1, input_operand_shape.at(1), input_operand_shape.at(2));
这一块不太清楚,我们实际代码看一遍:
for (int32_t i = 0; i < batch; ++i) {
if (input_operand_shape.size() == 4) {
input_datas.at(i) = std::make_shared<Tensor<float>>(
input_operand_shape.at(1), input_operand_shape.at(2),
input_operand_shape.at(3));也就是如果是shape == 4 , 那就是三维的,那么1就是channel,2就是row,3就是col
那么如果输入的channel == 1,或者row == 1
Tensor<float>::Tensor(uint32_t channels, uint32_t rows, uint32_t cols) {
data_ = arma::fcube(rows, cols, channels);
if (channels == 1 && rows == 1) {
this->raw_shapes_ = std::vector<uint32_t>{cols};
} else if (channels == 1) {
this->raw_shapes_ = std::vector<uint32_t>{rows, cols};
} else {
this->raw_shapes_ = std::vector<uint32_t>{channels, rows, cols};
}
}
那就正好被初始化为了我们之前的raw_shape 这样的一个逻辑维度
这就和我们上面的课程内容对应上了,Tensor<float>原本是一个三维数据,我们怎么在逻辑上给他表现成一个二维的张量呢?这就要用到我们上面说到的raw_shapes了。
- 调用并初始化一维的数据也同理, 在初始化的过程中会调用(channels==1&&rows==1) 这个条件判断,并将
raw_shapes这个维度定义成一维。
input_datas.at(i) = std::make_shared<Tensor<float>>(1, input_operand_shape.at(1), 1)避免第二次初始化
那么在计算的过程中,我们只需要一次初始化就可以。
所以在第二次遇到她的时候,只需要去检查空间是否发生改变就可以啦
if (!input_datas.empty()) {
CHECK(input_datas.size() == batch) << "Batch size is wrong!";
for (int32_t i = 0; i < batch; ++i) {
const std::vector<uint32_t> &input_data_shape =
input_datas.at(i)->shapes();
CHECK(input_data_shape.size() == 3)
<< "THe origin shape size of operator input data do not equals "
"to three";
if (input_operand_shape.size() == 4) {
CHECK(input_data_shape.at(0) == input_operand_shape.at(1) &&
input_data_shape.at(1) == input_operand_shape.at(2) &&
input_data_shape.at(2) == input_operand_shape.at(3));
} else if (input_operand_shape.size() == 2) {
CHECK(input_data_shape.at(1) == input_operand_shape.at(1) &&
input_data_shape.at(0) == 1 && input_data_shape.at(2) == 1);
} else {
// current shape size = 3
CHECK(input_data_shape.at(1) == input_operand_shape.at(1) &&
input_data_shape.at(0) == 1 &&
input_data_shape.at(2) == input_operand_shape.at(2));
}
}
} CHECK(input_data_shape.at(0) == input_operand_shape.at(1) &&
input_data_shape.at(1) == input_operand_shape.at(2) &&
input_data_shape.at(2) == input_operand_shape.at(3));上面这一部分,左边是我们实际有的shape,也就是我们第一次初始化的shape,而右边的是我们再次遇到的时候应该具有的shape,所以这一次就是check这两个shape是否一致,如果check不通过,那就代表输入空间的大小被改变了。那这样的话就会报错,退出这个程序
示例:
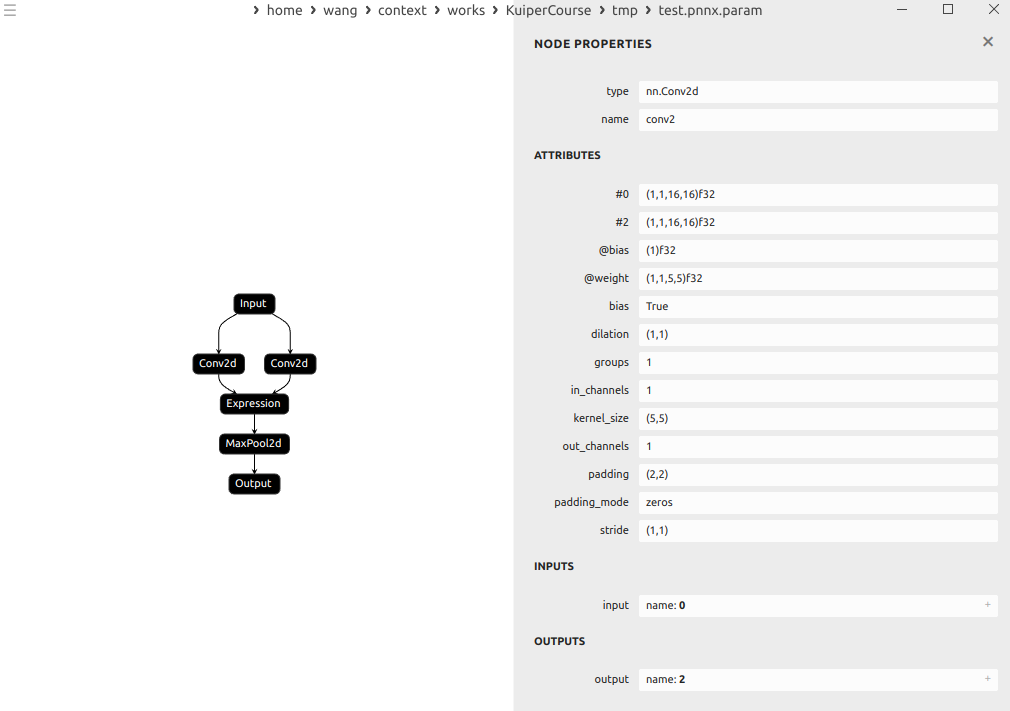
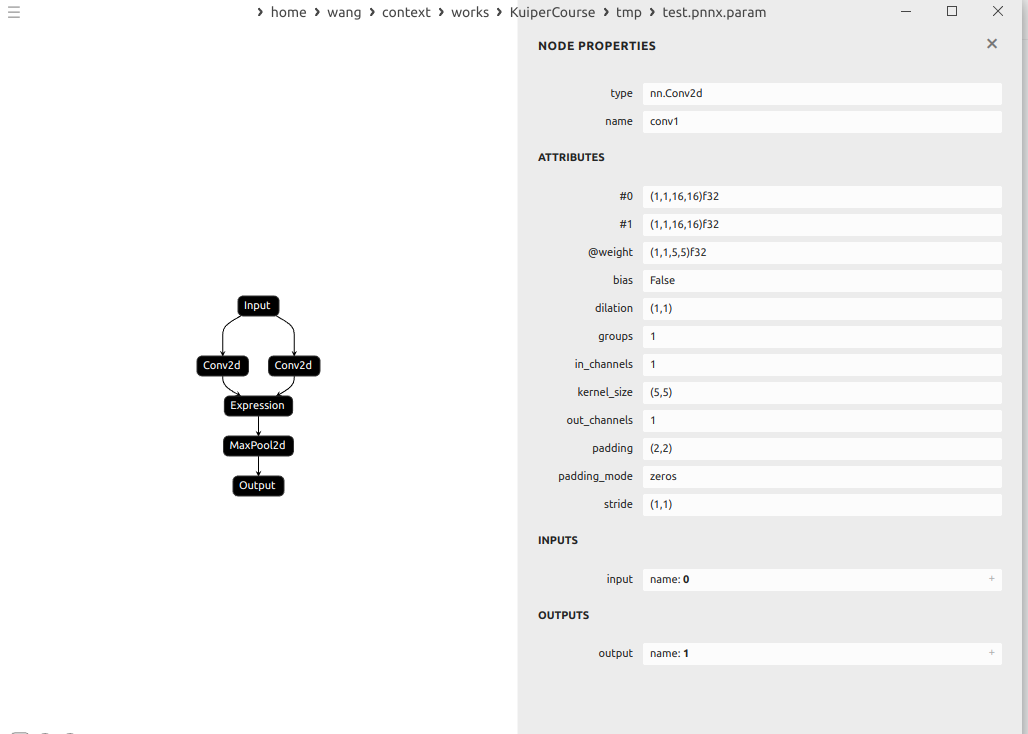
这里的conv的输出分别是1和2
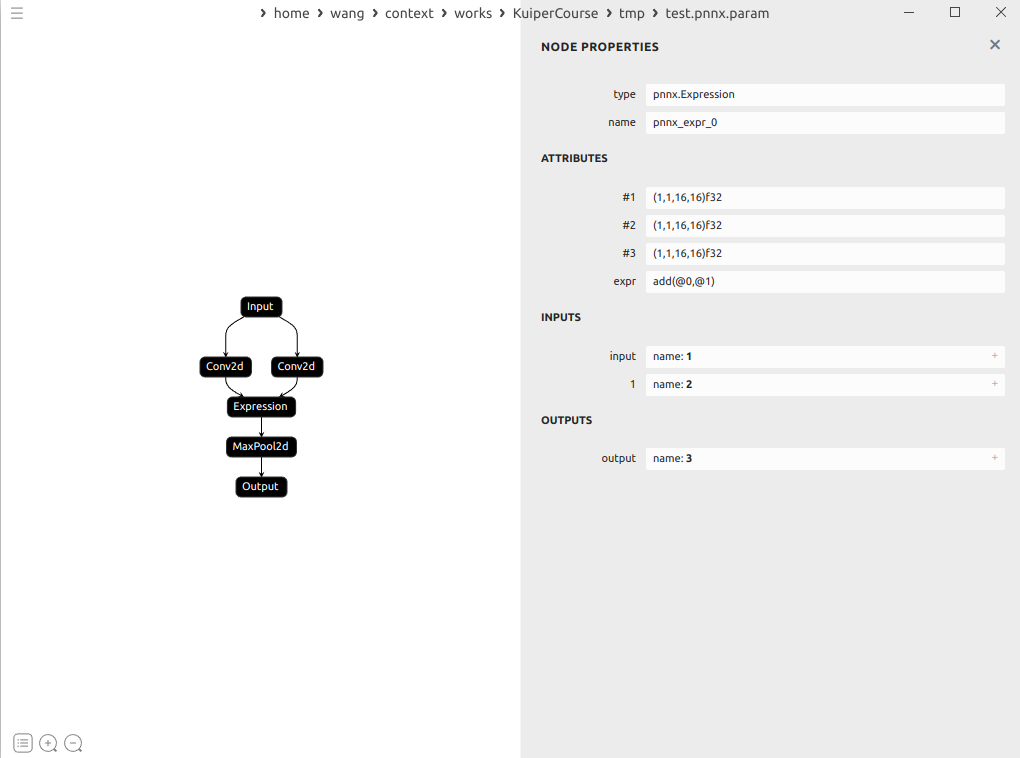
expression就接受了1和2为输入
最近在忙老师布置的任务,就耽误了这方面的进度,慢慢补把