目录
- 前言
- 1. yolov5封装
- 总结
前言
杜老师推出的 tensorRT从零起步高性能部署 课程,之前有看过一遍,但是没有做笔记,很多东西也忘了。这次重新撸一遍,顺便记记笔记。
本次课程学习 tensorRT 高级-基于生产者消费者实现的yolov5封装
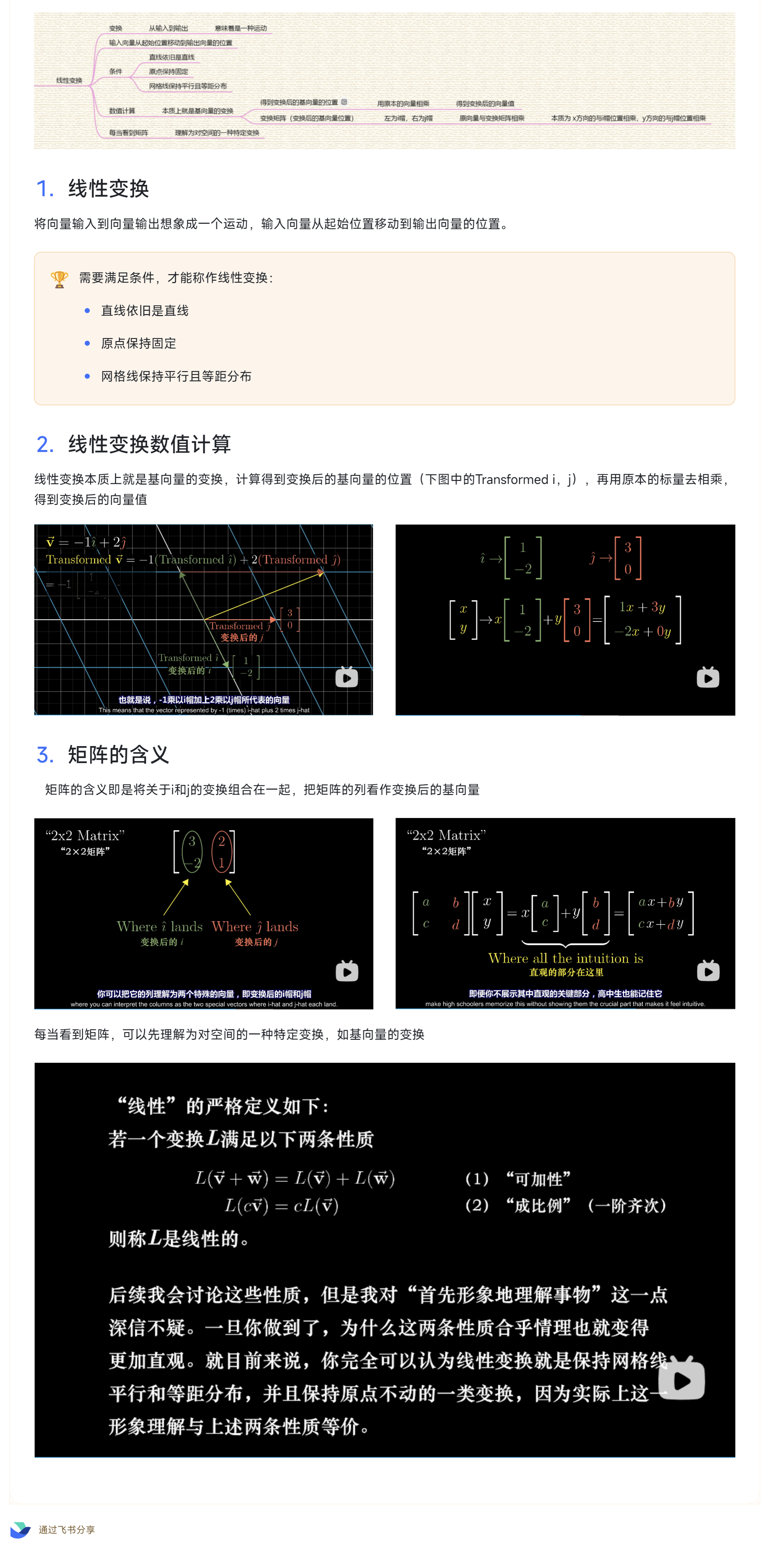
课程大纲可看下面的思维导图

1. yolov5封装
这节我们学习使用封装好的组件,配合生产者消费者,实现一个完整的 yolov5 推理
对于 yolov5 的封装,主要考虑以下:
1. 希望调用者是线程安全的,可以随意进行 commit,而不用考虑是否冲突
2. 希望结果是懒加载的,也就是需要的时候才等待,不需要的时候可以不等待
- 由 promise 与 future 配合实现
- 这样的灵活度和效率性能都是最好的
3. 希望最大化利用 GPU,如何利用呢?需要尽可能的使得计算密集
- 实际体现就是抓取一个批次,一次性进行推理
- 这在内部的消费者模型里面,一次抓一批
我们来看代码:
yolov5.hpp
#ifndef YOLOV5_HPP
#define YOLOV5_HPP
#include <string>
#include <future>
#include <memory>
#include <opencv2/opencv.hpp>
/
// 封装接口类
namespace YoloV5{
struct Box{
float left, top, right, bottom, confidence;
int class_label;
Box() = default;
Box(float left, float top, float right, float bottom, float confidence, int class_label)
:left(left), top(top), right(right), bottom(bottom), confidence(confidence), class_label(class_label){}
};
typedef std::vector<Box> BoxArray;
class Infer{
public:
virtual std::shared_future<BoxArray> commit(const cv::Mat& input) = 0;
};
std::shared_ptr<Infer> create_infer(
const std::string& file,
int gpuid=0, float confidence_threshold=0.25, float nms_threshold=0.45
);
};
#endif // YOLOV5_HPP
yolov5.cpp
#include "yolov5.hpp"
#include <thread>
#include <vector>
#include <condition_variable>
#include <mutex>
#include <string>
#include <future>
#include <queue>
#include <functional>
#include "trt-infer.hpp"
#include "cuda-tools.hpp"
#include "simple-logger.hpp"
/
// 封装接口类
using namespace std;
namespace YoloV5{
struct Job{
shared_ptr<promise<BoxArray>> pro;
cv::Mat input;
float d2i[6];
};
class InferImpl : public Infer{
public:
virtual ~InferImpl(){
stop();
}
void stop(){
if(running_){
running_ = false;
cv_.notify_one();
}
if(worker_thread_.joinable())
worker_thread_.join();
}
bool startup(const string& file, int gpuid, float confidence_threshold, float nms_threshold){
file_ = file;
running_ = true;
gpuid_ = gpuid;
confidence_threshold_ = confidence_threshold;
nms_threshold_ = nms_threshold;
promise<bool> pro;
worker_thread_ = thread(&InferImpl::worker, this, std::ref(pro));
return pro.get_future().get();
}
virtual shared_future<BoxArray> commit(const cv::Mat& image) override{
if(image.empty()){
INFOE("Image is empty");
return shared_future<BoxArray>();
}
Job job;
job.pro.reset(new promise<BoxArray>());
float scale_x = input_width_ / (float)image.cols;
float scale_y = input_height_ / (float)image.rows;
float scale = std::min(scale_x, scale_y);
float i2d[6];
i2d[0] = scale; i2d[1] = 0; i2d[2] = (-scale * image.cols + input_width_ + scale - 1) * 0.5;
i2d[3] = 0; i2d[4] = scale; i2d[5] = (-scale * image.rows + input_height_ + scale - 1) * 0.5;
cv::Mat m2x3_i2d(2, 3, CV_32F, i2d);
cv::Mat m2x3_d2i(2, 3, CV_32F, job.d2i);
cv::invertAffineTransform(m2x3_i2d, m2x3_d2i);
job.input.create(input_height_, input_width_, CV_8UC3);
cv::warpAffine(image, job.input, m2x3_i2d, job.input.size(), cv::INTER_LINEAR, cv::BORDER_CONSTANT, cv::Scalar::all(114));
job.input.convertTo(job.input, CV_32F, 1 / 255.0f);
shared_future<BoxArray> fut = job.pro->get_future();
{
lock_guard<mutex> l(lock_);
jobs_.emplace(std::move(job));
}
cv_.notify_one();
return fut;
}
vector<Box> cpu_decode(
float* predict, int rows, int cols, float* d2i,
float confidence_threshold = 0.25f, float nms_threshold = 0.45f
){
vector<Box> boxes;
int num_classes = cols - 5;
for(int i = 0; i < rows; ++i){
float* pitem = predict + i * cols;
float objness = pitem[4];
if(objness < confidence_threshold)
continue;
float* pclass = pitem + 5;
int label = std::max_element(pclass, pclass + num_classes) - pclass;
float prob = pclass[label];
float confidence = prob * objness;
if(confidence < confidence_threshold)
continue;
float cx = pitem[0];
float cy = pitem[1];
float width = pitem[2];
float height = pitem[3];
// 通过反变换恢复到图像尺度
float left = (cx - width * 0.5) * d2i[0] + d2i[2];
float top = (cy - height * 0.5) * d2i[0] + d2i[5];
float right = (cx + width * 0.5) * d2i[0] + d2i[2];
float bottom = (cy + height * 0.5) * d2i[0] + d2i[5];
boxes.emplace_back(left, top, right, bottom, confidence, (float)label);
}
std::sort(boxes.begin(), boxes.end(), [](Box& a, Box& b){return a.confidence > b.confidence;});
std::vector<bool> remove_flags(boxes.size());
std::vector<Box> box_result;
box_result.reserve(boxes.size());
auto iou = [](const Box& a, const Box& b){
float cross_left = std::max(a.left, b.left);
float cross_top = std::max(a.top, b.top);
float cross_right = std::min(a.right, b.right);
float cross_bottom = std::min(a.bottom, b.bottom);
float cross_area = std::max(0.0f, cross_right - cross_left) * std::max(0.0f, cross_bottom - cross_top);
float union_area = std::max(0.0f, a.right - a.left) * std::max(0.0f, a.bottom - a.top)
+ std::max(0.0f, b.right - b.left) * std::max(0.0f, b.bottom - b.top) - cross_area;
if(cross_area == 0 || union_area == 0) return 0.0f;
return cross_area / union_area;
};
for(int i = 0; i < boxes.size(); ++i){
if(remove_flags[i]) continue;
auto& ibox = boxes[i];
box_result.emplace_back(ibox);
for(int j = i + 1; j < boxes.size(); ++j){
if(remove_flags[j]) continue;
auto& jbox = boxes[j];
if(ibox.class_label == jbox.class_label){
// class matched
if(iou(ibox, jbox) >= nms_threshold)
remove_flags[j] = true;
}
}
}
return box_result;
}
void worker(promise<bool>& pro){
// load model
checkRuntime(cudaSetDevice(gpuid_));
auto model = TRT::load_infer(file_);
if(model == nullptr){
// failed
pro.set_value(false);
INFOE("Load model failed: %s", file_.c_str());
return;
}
auto input = model->input();
auto output = model->output();
input_width_ = input->size(3);
input_height_ = input->size(2);
// load success
pro.set_value(true);
int max_batch_size = model->get_max_batch_size();
vector<Job> fetched_jobs;
while(running_){
{
unique_lock<mutex> l(lock_);
cv_.wait(l, [&](){
return !running_ || !jobs_.empty();
});
if(!running_) break;
for(int i = 0; i < max_batch_size && !jobs_.empty(); ++i){
fetched_jobs.emplace_back(std::move(jobs_.front()));
jobs_.pop();
}
}
for(int ibatch = 0; ibatch < fetched_jobs.size(); ++ibatch){
auto& job = fetched_jobs[ibatch];
auto& image = job.input;
cv::Mat channel_based[3];
for(int i = 0; i < 3; ++i){
// 这里实现bgr -> rgb
// 做的是内存引用,效率最高
channel_based[i] = cv::Mat(input_height_, input_width_, CV_32F, input->cpu<float>(ibatch, 2-i));
}
cv::split(image, channel_based);
}
// 一次加载一批,并进行批处理
// forward(fetched_jobs)
model->forward();
for(int ibatch = 0; ibatch < fetched_jobs.size(); ++ibatch){
auto& job = fetched_jobs[ibatch];
float* predict_batch = output->cpu<float>(ibatch);
auto boxes = cpu_decode(
predict_batch, output->size(1), output->size(2), job.d2i, confidence_threshold_, nms_threshold_
);
job.pro->set_value(boxes);
}
fetched_jobs.clear();
}
// 避免外面等待
unique_lock<mutex> l(lock_);
while(!jobs_.empty()){
jobs_.back().pro->set_value({});
jobs_.pop();
}
INFO("Infer worker done.");
}
private:
atomic<bool> running_{false};
int gpuid_;
float confidence_threshold_;
float nms_threshold_;
int input_width_;
int input_height_;
string file_;
thread worker_thread_;
queue<Job> jobs_;
mutex lock_;
condition_variable cv_;
};
shared_ptr<Infer> create_infer(const string& file, int gpuid, float confidence_threshold, float nms_threshold){
shared_ptr<InferImpl> instance(new InferImpl());
if(!instance->startup(file, gpuid, confidence_threshold, nms_threshold)){
instance.reset();
}
return instance;
}
};
头文件中定义了一个 Infer 类,该类只有一个 commit 纯虚函数,接收图像数据,然后 shared_future 对象,create_infer 函数用于 RAII,它创建并返回一个 Infer 接口类的实现,通过 startup 方法初始化实例
在 startup 函数中我们创建了一个 bool 类型的 promise 变量,用于判断资源是否获取成功,通过引用的方式传递到了消费者线程 worker 中,在 worker 线程里面会处理模型加载的过程,加载成功或者失败都会把结果反馈到对应的 promise 变量上,而通过 future 对象的 get 方法我们可以获取到是否成功,而成功之后消费者线程也启动了,会继续往下走
在 worker 消费者线程中,有个条件变量在等待,如果条件为 true 则退出等待,也就是当队列不为空时会退出等待,然后将队列中的数据移动到 vector 容器中,循环 vector 容器中的每个图像进行 brg2rgb 同时 split,然后将这一批数据送到网络进行推理拿到结果,然后对拿到的 box 进行decode,最好将通过 promise 的 set_value 方法将 boxes 返回回去
我们再来看下 commit 生产者线程,它会将接收的图像数据进行预处理后放入到队列中,然后利用条件变量通知消费者线程可以处理了,其中预处理使用的是 warpAffine 仿射变换,
总的来说,上述代码提供了 YOLOv5 的推理功能。它实现了一个生产者-消费者模式,其中生产者可以异步地提交推理任务,并使用 future-promise 获取结果。worker 线程作为消费者执行这些任务。以下是 yolov5 封装的关键点:
1. 封装的接口:定义了 Infer 接口,提供异步推理的方法
2. 生产者-消费者模式:该实现采用生产者-消费者模式,其中生产者提交推理任务,worker 线程作为消费者去执行
3. 异步处理:使用 future-promise 机制,生产者可以异步地提交任务并等待结果
4. 预处理:预处理采用 warpAffine 仿射变换
5. decode:采用 IM 逆矩阵进行解码恢复成框
6. 多线程安全:使用互斥锁和条件变量确保多线程安全
7. 资源管理:使用 RAII 原则确保资源的正确管理
最好我们来看下 main.cpp 中的内容变化:
// tensorRT include
// 编译用的头文件
#include <NvInfer.h>
// onnx解析器的头文件
#include <onnx-tensorrt/NvOnnxParser.h>
// 推理用的运行时头文件
#include <NvInferRuntime.h>
// cuda include
#include <cuda_runtime.h>
// system include
#include <stdio.h>
#include <math.h>
#include <iostream>
#include <fstream>
#include <vector>
#include <memory>
#include <functional>
#include <unistd.h>
#include <opencv2/opencv.hpp>
#include "trt-builder.hpp"
#include "simple-logger.hpp"
#include "yolov5.hpp"
using namespace std;
static const char* cocolabels[] = {
"person", "bicycle", "car", "motorcycle", "airplane",
"bus", "train", "truck", "boat", "traffic light", "fire hydrant",
"stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse",
"sheep", "cow", "elephant", "bear", "zebra", "giraffe", "backpack",
"umbrella", "handbag", "tie", "suitcase", "frisbee", "skis",
"snowboard", "sports ball", "kite", "baseball bat", "baseball glove",
"skateboard", "surfboard", "tennis racket", "bottle", "wine glass",
"cup", "fork", "knife", "spoon", "bowl", "banana", "apple", "sandwich",
"orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake",
"chair", "couch", "potted plant", "bed", "dining table", "toilet", "tv",
"laptop", "mouse", "remote", "keyboard", "cell phone", "microwave",
"oven", "toaster", "sink", "refrigerator", "book", "clock", "vase",
"scissors", "teddy bear", "hair drier", "toothbrush"
};
static bool exists(const string& path){
#ifdef _WIN32
return ::PathFileExistsA(path.c_str());
#else
return access(path.c_str(), R_OK) == 0;
#endif
}
// 上一节的代码
static bool build_model(){
if(exists("yolov5s.trtmodel")){
printf("yolov5s.trtmodel has exists.\n");
return true;
}
//SimpleLogger::set_log_level(SimpleLogger::LogLevel::Verbose);
TRT::compile(
TRT::Mode::FP32,
10,
"yolov5s.onnx",
"yolov5s.trtmodel",
1 << 28
);
INFO("Done.");
return true;
}
static void inference(){
auto image = cv::imread("rq.jpg");
auto yolov5 = YoloV5::create_infer("yolov5s.trtmodel");
auto boxes = yolov5->commit(image).get();
for(auto& box : boxes){
cv::Scalar color(0, 255, 0);
cv::rectangle(image, cv::Point(box.left, box.top), cv::Point(box.right, box.bottom), color, 3);
auto name = cocolabels[box.class_label];
auto caption = cv::format("%s %.2f", name, box.confidence);
int text_width = cv::getTextSize(caption, 0, 1, 2, nullptr).width + 10;
cv::rectangle(image, cv::Point(box.left-3, box.top-33), cv::Point(box.left + text_width, box.top), color, -1);
cv::putText(image, caption, cv::Point(box.left, box.top-5), 0, 1, cv::Scalar::all(0), 2, 16);
}
cv::imwrite("image-draw.jpg", image);
}
int main_old();
int main(){
// 旧的实现,请参照main-old.cpp
main_old();
// 新的实现
if(!build_model()){
return -1;
}
inference();
return 0;
}
模型构建部分非常简单,一行代码解决模型编译问题,非常方便。推理部分通过 create_infer 拿到一个 shared_ptr 对象,通过调用 commit 方法把图像加入到生成者队列中,然后通过 get 方法等待消费者线程拿到推理结果,然后直接绘制目标框即可,相比于之前的纯裸的,无封装的 yolov5 来说非常简便了
总结
本次课程学习了基于生产者和消费者实现的 yolov5 封装,commit 生成者线程不断往队列中抛数据,通过条件变量 cv_ 通知消费者进行消费,worker 消费者线程会一直等待,直到队列不为空,它会把一批次数据全部扔到模型中进行推理,然后解码,通过 promise 将结果传递回来。create_infer 是 RAII 和接口模式的体现,通过 startup 获取资源并初始话,如果资源获取失败则直接退出,同时实例化的是实现类 InferImpl,而返回的是接口类 Infer,只对使用者暴露 commit 接口。这都是我们之前在生产者消费者课程中讲到过的知识,这边是直接拿过来用了。