机器学习笔记之优化算法——梯度下降法:凸函数VS强凸函数
- 引言
- 凸函数:
- 凸函数的定义与判定条件
- 凸函数的一阶条件
- 凸函数的梯度单调性
- 凸函数的二阶条件
- 强凸函数
- 强凸函数的定义
- 强凸函数的判定条件
- 强凸函数的一阶条件
- 强凸函数的梯度单调性
- 强突函数的二阶条件
引言
本节将介绍凸函数、强凸函数以及它们之间的联系(补梯度下降法:总体介绍中的坑)。
凸函数:
凸函数的定义与判定条件
关于凸函数的定义表示如下:设
f
(
⋅
)
f(\cdot)
f(⋅)为定义在空间
I
\mathcal I
I上的函数,若对
I
\mathcal I
I上的任意两点
x
1
,
x
2
x_1,x_2
x1,x2与任意实数
λ
∈
(
0
,
1
)
\lambda \in (0,1)
λ∈(0,1)总有:
通常将空间
I
\mathcal I
I设置为实数域与空间
⇒
R
n
\Rightarrow \mathbb R^n
⇒Rn。
f
[
λ
⋅
x
2
+
(
1
−
λ
)
⋅
x
1
]
≤
λ
⋅
f
(
x
2
)
+
(
1
−
λ
)
⋅
f
(
x
1
)
f[\lambda \cdot x_2 + (1 - \lambda) \cdot x_1] \leq \lambda \cdot f(x_2) + (1 - \lambda) \cdot f(x_1)
f[λ⋅x2+(1−λ)⋅x1]≤λ⋅f(x2)+(1−λ)⋅f(x1)
则称:函数
f
(
⋅
)
f(\cdot)
f(⋅)为
I
\mathcal I
I上的凸函数。对应示例图像表示如下:
将其转化:
λ
⋅
x
2
+
(
1
−
λ
)
⋅
x
1
=
x
1
+
λ
⋅
(
x
2
−
x
1
)
\lambda \cdot x_2 + (1 - \lambda)\cdot x_1 = x_1 + \lambda \cdot (x_2 - x_1)
λ⋅x2+(1−λ)⋅x1=x1+λ⋅(x2−x1),那么
λ
(
x
2
−
x
1
)
\lambda(x_2 - x_1)
λ(x2−x1)可看作增量,而
λ
\lambda
λ可看作控制增量的参数。

凸函数的一种判定条件:构造一个函数
G
(
t
)
\mathcal G(t)
G(t),满足:
G
(
t
)
≜
f
(
x
+
v
⋅
t
)
∀
x
,
v
∈
R
n
,
t
∈
R
\mathcal G(t) \triangleq f(x + v \cdot t) \quad \forall x,v \in \mathbb R^n,t \in \mathbb R
G(t)≜f(x+v⋅t)∀x,v∈Rn,t∈R
则有推论:
f
(
⋅
)
f(\cdot)
f(⋅)是凸函数
⇔
G
(
t
)
\Leftrightarrow \mathcal G(t)
⇔G(t)是凸函数。在一般情况下,我们面对的权重空间是一个高维空间,而在高维空间中的目标函数
f
(
⋅
)
f(\cdot)
f(⋅)也通常是一个高维函数。假设:权重空间是一个
2
2
2维空间,对应的目标函数
f
(
⋅
)
f(\cdot)
f(⋅)也是一个
2
2
2维函数:
即:输入变量的维度是
2
2
2维,而目标函数的输出结果是
1
1
1维标量。
f
(
⋅
)
:
R
2
↦
R
f(\cdot):\mathbb R^2 \mapsto \mathbb R
f(⋅):R2↦R
那么如何验证
f
(
⋅
)
f(\cdot)
f(⋅)描述的图像在高维空间中的曲面是否为凸的
?
?
?在介绍方向导数中提到:关于某一点
(
x
0
,
y
0
)
(x_0,y_0)
(x0,y0)关于函数
f
(
⋅
)
f(\cdot)
f(⋅)在方向
l
⃗
\vec l
l的方向导数
∂
Z
∂
l
⃗
∣
(
x
0
,
y
0
)
\begin{aligned}\frac{\partial \mathcal Z}{\partial \vec l}|_{(x_0,y_0)}\end{aligned}
∂l∂Z∣(x0,y0)表示为下图中在
l
⃗
\vec l
l方向上过
(
x
0
,
y
0
)
(x_0,y_0)
(x0,y0)做一个垂直于
X
O
Y
\mathcal X\mathcal O\mathcal Y
XOY的平面,平面与
f
(
⋅
)
f(\cdot)
f(⋅)相交的图像在
(
x
0
,
y
0
)
(x_0,y_0)
(x0,y0)处的斜率结果:
其中黄色菱形部分表示垂直于X O Y \mathcal X\mathcal O\mathcal Y XOY平面在l ⃗ \vec l l方向上并过( x 0 , y 0 ) (x_0,y_0) (x0,y0)黄色点的平面;红色点则表示( x 0 , y 0 ) (x_0,y_0) (x0,y0)在函数f ( ⋅ ) f(\cdot) f(⋅)上的结果;而黑色实线则表示过映射点与函数图像相切的直线,其斜率即方向导数∂ Z ∂ l ⃗ ∣ ( x 0 , y 0 ) \begin{aligned}\frac{\partial \mathcal Z}{\partial \vec l}|_{(x_0,y_0)}\end{aligned} ∂l∂Z∣(x0,y0)。

但这里我们并不关注方向导数,而是关注平面与函数图像之间相交所产生的截线的形状。可以观察上述图像对应的俯视图结果:
无论是上图还是俯视图,都没有对
f
(
x
,
y
)
f(x,y)
f(x,y)进行完全表示,这仅仅是其中一部分图像。

从俯视图角度可以看到:黄色截面简化成了一条直线。这实际上可看做上述判定条件中函数
x
+
v
⋅
t
x+v \cdot t
x+v⋅t的某一种结果。而对应的
f
(
x
+
v
⋅
t
)
f(x + v \cdot t)
f(x+v⋅t)则表达:截面与函数图像之间相交产生的截线。
如果从向量的角度认识,以下面红色直线为例:

其中
x
,
v
x,v
x,v是任意
R
n
\mathbb R^n
Rn的向量,从而
x
+
v
⋅
t
x+v \cdot t
x+v⋅t可表示为该图黑色虚线的结果。由于
t
∈
R
t \in \mathbb R
t∈R,如果我们将所有的
t
t
t全部取到,那么最终构成
x
+
v
⋅
t
x + v \cdot t
x+v⋅t构成向量的集合就是红色直线的结果。
关于向量v v v,我们通常将其视作单位向量。因为即便不是单位向量,在转化为单位向量过程中得到的标量系数k k k也可以与t t t进行合并:t ∈ R ⇒ k ⋅ t ∈ R t \in\mathbb R \Rightarrow k \cdot t \in \mathbb R t∈R⇒k⋅t∈R。如果将v v v看作单位向量e ⃗ ( cos α , cos β ) \vec e(\cos \alpha,\cos\beta) e(cosα,cosβ),那么过点P ( x 0 , y 0 ) \mathcal P(x_0,y_0) P(x0,y0),并且方向与e ⃗ \vec e e平行的直线参数方程可表示为:
Y = ( x 0 , y 0 ) + t ⋅ e ⃗ = ( x 0 , y 0 ) + t ⋅ ( cos α , cos β ) \mathcal Y = (x_0,y_0) + t \cdot \vec e = (x_0,y_0) + t \cdot (\cos\alpha,\cos\beta) Y=(x0,y0)+t⋅e=(x0,y0)+t⋅(cosα,cosβ)
因此,关于该判定条件的另一种表达有:如果
x
+
v
⋅
t
x + v \cdot t
x+v⋅t在该权重空间中描述的任意一个截面,其与函数
f
(
⋅
)
f(\cdot)
f(⋅)相交产生的任意一条截线对应的函数均是凸函数,那么函数
f
(
⋅
)
f(\cdot)
f(⋅)也是一个凸函数,反之同理。
这是一个充分必要条件。
凸函数的一阶条件
在函数
f
(
⋅
)
f(\cdot)
f(⋅)可微的条件下,有:
相比于上述的定义与判定条件,并没有要求函数
f
(
⋅
)
f(\cdot)
f(⋅)一定是可微的。也就是说:一个函数是凸函数,并不要求该函数一定可微。
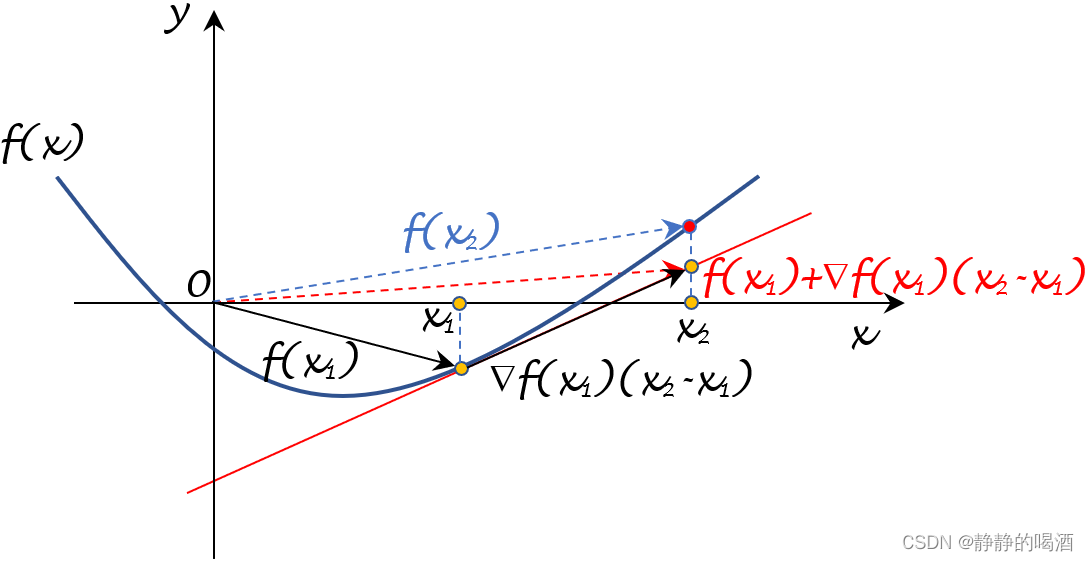
f
(
⋅
)
is Convex
⇔
f
(
x
2
)
≥
f
(
x
1
)
+
[
∇
f
(
x
1
)
]
T
⋅
(
x
2
−
x
1
)
f(\cdot) \text{ is Convex} \Leftrightarrow f(x_2) \geq f(x_1) + [\nabla f(x_1)]^T \cdot (x_2-x_1)
f(⋅) is Convex⇔f(x2)≥f(x1)+[∇f(x1)]T⋅(x2−x1)
这是一个充分必要条件。可以在图像中看到这个现象:
凸函数的梯度单调性
在函数
f
(
⋅
)
f(\cdot)
f(⋅)可微的条件下,
[
∇
f
(
x
)
−
∇
f
(
y
)
]
[\nabla f(x) - \nabla f(y)]
[∇f(x)−∇f(y)]与
x
−
y
x-y
x−y之间同号。即:
f
(
⋅
)
is Convex
⇔
[
∇
f
(
x
)
−
∇
f
(
y
)
]
T
(
x
−
y
)
≥
0
f(\cdot) \text{ is Convex } \Leftrightarrow [\nabla f(x) - \nabla f(y)]^T (x - y) \geq 0
f(⋅) is Convex ⇔[∇f(x)−∇f(y)]T(x−y)≥0
证明:充分性
如果
f
(
⋅
)
f(\cdot)
f(⋅)是可微的凸函数,根据凸函数的一阶条件,有:
{
f
(
y
)
≥
f
(
x
)
+
[
∇
f
(
x
)
]
T
⋅
(
y
−
x
)
f
(
x
)
≥
f
(
y
)
+
[
∇
f
(
y
)
]
T
⋅
(
x
−
y
)
\begin{cases} \begin{aligned} f(y) \geq f(x) + [\nabla f(x)]^T \cdot (y - x) \\ f(x) \geq f(y) + [\nabla f(y)]^T \cdot (x - y) \end{aligned} \end{cases}
{f(y)≥f(x)+[∇f(x)]T⋅(y−x)f(x)≥f(y)+[∇f(y)]T⋅(x−y)
将上述式子相加,有:
[
∇
f
(
x
)
−
∇
f
(
y
)
]
T
⋅
(
x
−
y
)
≥
0
[\nabla f(x) - \nabla f(y)]^T \cdot (x - y) \geq 0
[∇f(x)−∇f(y)]T⋅(x−y)≥0
证明:必要性
如果
f
(
⋅
)
f(\cdot)
f(⋅)的梯度
∇
f
(
⋅
)
\nabla f(\cdot)
∇f(⋅)是单调的,定义关于
t
∈
[
0
,
1
]
t \in [0,1]
t∈[0,1]的函数
G
(
t
)
\mathcal G(t)
G(t):
G
(
t
)
=
f
[
x
+
t
⋅
(
y
−
x
)
]
\mathcal G(t) = f[x + t \cdot (y - x)]
G(t)=f[x+t⋅(y−x)]
对应
G
(
t
)
\mathcal G(t)
G(t)的导数
G
′
(
t
)
\mathcal G'(t)
G′(t):
G
′
(
t
)
=
[
∇
f
(
x
+
t
⋅
(
y
−
x
)
)
]
T
⋅
(
y
−
x
)
\mathcal G'(t) = [\nabla f(x + t \cdot (y-x))]^T \cdot (y-x)
G′(t)=[∇f(x+t⋅(y−x))]T⋅(y−x)
由于
G
′
(
t
)
\mathcal G'(t)
G′(t)在
t
∈
[
0
,
1
]
t \in [0,1]
t∈[0,1]上连续,且:
[
∇
f
(
x
)
−
∇
f
(
y
)
]
T
⋅
(
x
−
y
)
≥
0
[\nabla f(x) - \nabla f(y)]^T \cdot (x - y) \geq 0
[∇f(x)−∇f(y)]T⋅(x−y)≥0
从而有:
消了两个负号~
G
′
(
t
)
≥
G
′
(
0
)
⇐
{
G
′
(
1
)
−
G
′
(
0
)
=
[
∇
f
(
y
)
−
∇
f
(
x
)
]
T
⋅
(
y
−
x
)
≥
0
G
′
(
0
)
−
G
′
(
0
)
=
0
\mathcal G'(t) \geq \mathcal G'(0) \Leftarrow \begin{cases} \mathcal G'(1) - \mathcal G'(0) = [\nabla f(y) - \nabla f(x)]^T \cdot (y-x) \geq 0 \\ \mathcal G'(0) - \mathcal G'(0) = 0 \end{cases}
G′(t)≥G′(0)⇐{G′(1)−G′(0)=[∇f(y)−∇f(x)]T⋅(y−x)≥0G′(0)−G′(0)=0
最终有:
f
(
y
)
=
G
(
1
)
=
G
(
0
)
+
∫
0
1
G
′
(
t
)
d
t
≥
G
(
0
)
+
G
′
(
0
)
=
f
(
x
)
+
[
∇
f
(
x
)
]
T
(
y
−
x
)
f(y) = \mathcal G(1) = \mathcal G(0) + \int_0^1 \mathcal G'(t) dt \geq \mathcal G(0) + \mathcal G'(0) = f(x) + [\nabla f(x)]^T (y-x)
f(y)=G(1)=G(0)+∫01G′(t)dt≥G(0)+G′(0)=f(x)+[∇f(x)]T(y−x)
即:
f
(
⋅
)
f(\cdot)
f(⋅)为凸函数。
凸函数的二阶条件
在函数
f
(
⋅
)
f(\cdot)
f(⋅)二阶可微的条件下,说明关于
f
(
⋅
)
f(\cdot)
f(⋅)的二阶梯度
∇
2
f
(
⋅
)
\nabla^2 f(\cdot)
∇2f(⋅)存在,即对应的
Hessian Matrix
\text{Hessian Matrix}
Hessian Matrix存在。从而有该矩阵是一个半正定矩阵:
简单注意一下,这里的
0
0
0指的是
0
0
0矩阵。
f
(
⋅
)
is Convex
⇔
∇
2
f
(
x
)
≽
0
f(\cdot) \text{ is Convex } \Leftrightarrow \nabla^2 f(x) \succcurlyeq 0
f(⋅) is Convex ⇔∇2f(x)≽0
强凸函数
强凸函数的定义
关于强凸函数的定义表示如下:设
f
(
⋅
)
f(\cdot)
f(⋅)为定义在空间
I
\mathcal I
I上的函数,若存在
m
>
0
m>0
m>0,使其对
I
\mathcal I
I上的任意两点
x
1
,
x
2
x_1,x_2
x1,x2与任意实数
λ
∈
(
0
,
1
)
\lambda \in (0,1)
λ∈(0,1)总有:
λ
⋅
f
(
x
1
)
+
(
1
−
λ
)
⋅
f
(
x
2
)
≥
f
[
θ
⋅
x
1
+
(
1
−
θ
)
⋅
x
2
]
+
m
2
⋅
θ
(
1
−
θ
)
⋅
∣
∣
x
1
−
x
2
∣
∣
2
\lambda\cdot f(x_1) + (1 - \lambda) \cdot f(x_2) \geq f[\theta \cdot x_1 + (1 - \theta) \cdot x_2] + \frac{m}{2} \cdot \theta(1 - \theta) \cdot ||x_1 -x _2||^2
λ⋅f(x1)+(1−λ)⋅f(x2)≥f[θ⋅x1+(1−θ)⋅x2]+2m⋅θ(1−θ)⋅∣∣x1−x2∣∣2
相比于凸函数的定义,强凸函数明显多了一个部分:
m
2
⋅
θ
(
1
−
θ
)
⋅
∣
∣
x
1
−
x
2
∣
∣
2
\begin{aligned}\frac{m}{2} \cdot \theta(1 - \theta) \cdot ||x_1 -x _2||^2\end{aligned}
2m⋅θ(1−θ)⋅∣∣x1−x2∣∣2。并且这个部分一定是正数。这相比凸函数仅仅
≥
0
\geq 0
≥0的约束要更强。
也被称作
m
m
m-强凸,其与凸函数定义的本质区别是相比凸函数多了一个
>
0
>0
>0下界的保证。
强凸函数的判定条件
和凸函数的判定条件相类似,关于强凸的判定条件同样没有直接对 f ( ⋅ ) f(\cdot) f(⋅)进行描述。对应条件表示如下:
- 定义
G
(
x
)
≜
f
(
x
)
−
1
2
m
⋅
∣
∣
x
∣
∣
2
\begin{aligned}\mathcal G(x) \triangleq f(x) - \frac{1}{2} m \cdot ||x||^2\end{aligned}
G(x)≜f(x)−21m⋅∣∣x∣∣2,有:
f ( ⋅ ) is m-Strong Convex ⇔ G ( x ) is Convex f(\cdot) \text{ is m-Strong Convex } \Leftrightarrow \mathcal G(x) \text{ is Convex} f(⋅) is m-Strong Convex ⇔G(x) is Convex
强凸函数的一阶条件
关于强凸函数的一阶条件是在对应凸函数一阶条件的基础上,加入一个二次下界:
和
f
(
⋅
)
f(\cdot)
f(⋅)梯度满足利普希兹连续对应的二次上界引理不同:
∇
f
(
⋅
)
Lipschitz
⇔
f
(
x
2
)
≤
f
(
x
1
)
+
[
∇
f
(
x
1
)
]
T
(
x
2
−
x
1
)
+
L
2
∣
∣
x
2
−
x
1
∣
∣
2
\nabla f(\cdot) \text{ Lipschitz} \Leftrightarrow f(x_2) \leq f(x_1) + [\nabla f(x_1)]^T (x_2 - x_1) + \frac{\mathcal L}{2}||x_2 - x_1||^2
∇f(⋅) Lipschitz⇔f(x2)≤f(x1)+[∇f(x1)]T(x2−x1)+2L∣∣x2−x1∣∣2
利普希兹连续强调的是限制梯度变化量的上界;而
m
m
m-强凸强调一个
>
0
>0
>0的二次下界。
f
(
⋅
)
is m-Strong Convex
⇔
f
(
x
2
)
≥
f
(
x
1
)
+
[
∇
f
(
x
1
)
]
T
(
x
2
−
x
1
)
+
m
2
∣
∣
x
2
−
x
1
∣
∣
2
f(\cdot) \text{ is m-Strong Convex } \Leftrightarrow f(x_2) \geq f(x_1) + [\nabla f(x_1)]^T (x_2-x_1) + \frac{m}{2}||x_2 - x_1||^2
f(⋅) is m-Strong Convex ⇔f(x2)≥f(x1)+[∇f(x1)]T(x2−x1)+2m∣∣x2−x1∣∣2
强凸函数的梯度单调性
和凸函数的梯度单调性基本类似,只不过下界由
0
0
0换成了:
证明过程略。
f
(
⋅
)
is m-Strong Convex
⇔
[
∇
f
(
x
)
−
∇
f
(
y
)
]
T
(
x
−
y
)
≥
m
⋅
∣
∣
x
−
y
∣
∣
2
f(\cdot) \text{ is m-Strong Convex } \Leftrightarrow [\nabla f(x) - \nabla f(y)]^T (x - y) \geq m \cdot ||x - y||^2
f(⋅) is m-Strong Convex ⇔[∇f(x)−∇f(y)]T(x−y)≥m⋅∣∣x−y∣∣2
强突函数的二阶条件
在
f
(
⋅
)
f(\cdot)
f(⋅)二阶可微的条件下,有:
其中
I
\mathcal I
I指单位矩阵。
f
(
⋅
)
is m-Strong Convex
⇔
∇
2
f
(
x
)
≽
m
⋅
I
f(\cdot) \text{ is m-Strong Convex } \Leftrightarrow \nabla^2 f(x) \succcurlyeq m \cdot \mathcal I
f(⋅) is m-Strong Convex ⇔∇2f(x)≽m⋅I
相关参考:
【优化算法】梯度下降法-基础补充-凸函数vs强凸函数vs严格凸函数(上)
【优化算法】梯度下降法-基础补充-凸函数vs强凸函数vs严格凸函数(下)
工具箱:
红色楷体
蓝色楷体