接上文:FT 在图像处理中的应用
五、一个大型案例:基于 FFT 的海浪模拟
前置:
- 傅里叶级数与傅里叶变换
- 离散傅里叶变换(DFT)
- FT 在图像处理中的应用

5.1 FFT 海洋公式:二维 IDFT
https://tore.tuhh.de/bitstream/11420/1439/1/GPGPU_FFT_Ocean_Simulation.pdf
https://www.youtube.com/watch?v=ClW3fo94KR4
既然任意连续且收敛的函数 都可以分解为无数个不同频率、不同幅值的正、余弦信号,且这个性质可以扩展到二维,即任意一个二维图像都可以分解为无数个复平面波
的叠加

那么海浪作为“波”的典型,是否也可以将其拆成任意方向不同频率强度的基波的叠加?当然没有问题:令 为
时刻,位置
上海面的高度,其构建公式就为
可以看出,这正是二维离散傅里叶变换的逆变换(IDFT)版本,只不过多了一个量度即时间,考虑到 DFT 形式下任意 将对应所有可能的复平面波
,就能顺理成章的推出波矢量
其中常量 为海平面大小,采样点
满足
,N 为采样点数量,当然也可以做个变换,即将范围映射到
,此时
本质不变
代入上面的海洋方程,并将所有向量全部展开,为方便可以直接任 就有
当然也可以任 ,这在计算方式上是相同的
5.1.1 二维 IFFT
前面已经详细介绍过了一维 FFT 的原理和计算过程,这里同样要扩展二维以得到最终的 ,其实看这个二维 IDFT 式子,你就会发现结论很明显了:
它其实是可以拆成两个一维的 IDFT 的:
那么最终我们计算海洋公式的步骤就应如下:
- 计算
生成频谱,如果是交给 GPU 计算,可以将结果存储在一张 NxN 的纹理中(关于
-
执行 N 次水平 FFT:
,上一步的纹理作为输入,输出结果作为下一步的输入
-
执行 N 次纵向 FFT:
,得到的结果再进行最后的符号计算:即乘上
,搞定

到此,我们就拿到了一张高度图,可以用于后续的顶点动画及渲染着色了
5.2 海浪统计模型
事实上,这种基于 FFT 或者说基于频谱逆向推出海洋水面高度的方法,本质上是一种统计模型方法,这里面涉及不少其他领域内的知识,例如海洋物理学,又或是对现实海洋的实时观测统计与实验,我们当然不用深入了解这部分的内容,只要拿对应的统计结果来用就可以了
上面的内容还有一个很重要的东西还未知,就是用于表达海洋波的频率的集合、IDFT 中的频域函数 ,搞定了这个之后,我们才能通过 IDFT 算法将频谱转化为时域的值,从而得到海洋随时间变化的高度图
公式都给你写好了,照着抄就行
5.2.1 菲利浦频谱(Phillips spectrum)
菲利浦频谱来自海洋动力学的成果,是一个反馈了真实海洋的经验模型,也是这里一切的核心,当然这个模型并不唯一
对于菲利浦频谱 ,其中
,
是风速,
为风向,
为引力常数
为
的幅值,即频率大小
从论文得到的信息是:菲利浦频谱主要由两个单独部分组成,分别为
- 非定向波谱
,由海洋统计分析得出
- 方向扩展函数
,体现的是风向对波最终幅值的贡献
5.2.2 海洋初始状态
回到前面的 ,可以先考虑它的初始状态,也就是 t = 0 的时刻的振幅
有:
和
为两个相互独立的服从均值为0,标准差为1的高斯随机数,实部表初始幅度,虚部表初始相位,而
正是前面的方向波谱
这里再介绍另一个案例,其实后面的 FFT 实现也正是借鉴的这篇视频,这个案例中额外考虑了频谱到波的离散转化:
5.2.3 海洋公式最终形式
最后就是把时间参数加上:
,这里又有
- 角频率与波长的频散关系
满足
,其考虑了引力风波和重力场的关系,当然如果额外考虑水深 h,其频散关系
是
的共轭复数
到此为止,整个 IDFT 公式就明朗了,然后就是套用上面 IFFT 的步骤
5.3 基于 GPGPU 的 Ocean IFFT 计算
通过上面的内容,可以预见的是生成高度图会有大量的数学计算,尽管这已经是算法加速后的结果了,因此大多数情况下都会把这部分计算任务交给更擅长并行计算的 GPU 而非 CPU
在 Unity 中,往往使用 ComputeShader 来实现
5.3.1 初始频谱计算
先是计算菲利浦频谱 以生成对应纹理,看上去最陌生的公式其实直接抄作业就行了,其中
作为纹理坐标,其余除了风向
都为常量。很明显,游戏中我们不太可能每帧去改变风向,因此风向
也可以视作常量(由美术或策划去配置),在这种情况下
的计算理论可以离线或者只在风向改变时做一次,不需要每帧去重复计算
然后就是高斯随机数 生成,这个只是为了得到不同的初始状态,因此同样可以离线计算:
//如果本地已经存在 GuassTexture,则不需要生成了,直接读取,否则在 Awake 时生成一份
private void Awake()
{
gaussianNoise = GetNoiseTexture(size);
}
Texture2D GetNoiseTexture(int size)
{
string filename = "GaussianNoiseTexture" + size.ToString() + "x" + size.ToString();
Texture2D noise = Resources.Load<Texture2D>("GaussianNoiseTextures/" + filename);
return noise ? noise : GenerateNoiseTexture(size, true);
}
float NormalRandom()
{
return Mathf.Cos(2 * Mathf.PI * Random.value) * Mathf.Sqrt(-2 * Mathf.Log(Random.value));
}
Texture2D GenerateNoiseTexture(int size, bool saveIntoAssetFile)
{
Texture2D noise = new Texture2D(size, size, TextureFormat.RGFloat, false, true);
noise.filterMode = FilterMode.Point;
for (int i = 0; i < size; i++)
{
for (int j = 0; j < size; j++)
{
noise.SetPixel(i, j, new Vector4(NormalRandom(), NormalRandom()));
}
}
noise.Apply();
//此处尝试将 GuassTexture 保存到本地,代码略
return noise;
}GPU Gems3:Chapter 37 中提到过如何生成满足服从均值为0,标准差为1的高斯随机数,公式如下:
其中 为均匀分布的随机数
然后两者相组合,就能得到 :
public void CalculateInitials(WavesSettings wavesSettings, float lengthScale)
{
//设置计算频谱的各项参数,例如风速、风向、重力加速度常量等
wavesSettings.SetParametersToShader(initialSpectrumShader, KERNEL_INITIAL_SPECTRUM, paramsBuffer);
//将计算的 H0k 保存到一张纹理中
initialSpectrumShader.SetTexture(KERNEL_INITIAL_SPECTRUM, H0K_PROP, buffer);
//计算角频率与波长的频散关系 w 保存到另一张纹理中
initialSpectrumShader.SetTexture(KERNEL_INITIAL_SPECTRUM, PRECOMPUTED_DATA_PROP, precomputedData);
//传入高斯随机数纹理,用于计算 H0K
initialSpectrumShader.SetTexture(KERNEL_INITIAL_SPECTRUM, NOISE_PROP, gaussianNoise);
//交给 GPGPU 开始计算
initialSpectrumShader.Dispatch(KERNEL_INITIAL_SPECTRUM, size / LOCAL_WORK_GROUPS_X, size / LOCAL_WORK_GROUPS_Y, 1);
//计算得到 H0k 后,把共轭结果 H*0K 也存下来
initialSpectrumShader.SetTexture(KERNEL_CONJUGATE_SPECTRUM, H0_PROP, initialSpectrum);
initialSpectrumShader.SetTexture(KERNEL_CONJUGATE_SPECTRUM, H0K_PROP, buffer);
initialSpectrumShader.Dispatch(KERNEL_CONJUGATE_SPECTRUM, size / LOCAL_WORK_GROUPS_X, size / LOCAL_WORK_GROUPS_Y, 1);
}中间用到了一个专门用于计算频谱函数的 ComputeShader,里面就是纯计算,并且由于计算模型并不唯一,具体代码就不贴了
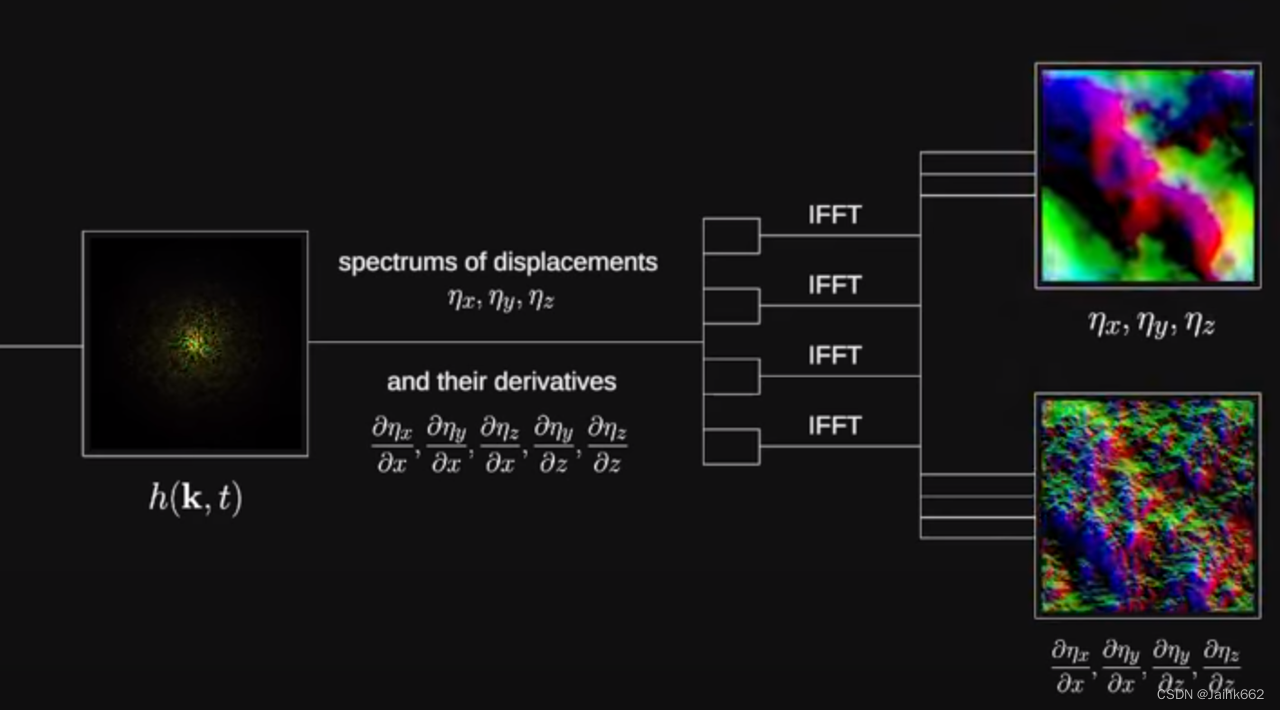
5.3.2 任意时刻频谱计算
关于 的代码实现更简单,毕竟前面已经得到了
以及
(该图片来源于 youtube《Ocean waves simulation with Fast Fourier transform》,后同):

float4 wave = WavesData[id.xy];
float phase = wave.w * Time;
float2 exponent = float2(cos(phase), sin(phase));
float2 h = ComplexMult(H0[id.xy].xy, exponent)
+ ComplexMult(H0[id.xy].zw, float2(exponent.x, -exponent.y));
float2 ih = float2(-h.y, h.x);不过考虑到海面并不只有高度变化,还有水平方向的流动,后续只有一张 y 轴的高度图还是不够的,还需要 x 轴和 z 轴的偏移图,这里可以先根据 获取水平方向的频谱
Gerstner 波为了展现波峰尖角,也同样对 xz 平面做了变换
前面代码将 一起塞到了一张4通道纹理中,这里继续拿来用:
float2 displacementX = ih * wave.x * wave.y;
float2 displacementY = h;
float2 displacementZ = ih * wave.z * wave.y;5.3.3 海洋法线
其实到这这一步应该就可以准备 IFFT 计算了,不过中间还有一个东西没有考虑,那就是法线图的生成,因为你要计算光照,法线图是必须的,实时的海浪必然意味着法线图也需要实时计算
这里关于法线计算有两种方案
- 得到高度图后,可以通过差分方法来求法线,即对变换后的新顶点
,求出与其相邻的两组顶点
和
,交叉连线后得到两个向量,叉乘得出法线,
-
通过偏导计算求出曲面梯度,然后再根据梯度得到法线
方案①逻辑非常简单,可以直接在着色器中实时计算得到法线,缺点也很明显,那就是仅能得到近似法线,这个结果是不会准确的,所以后续若想要得到一个比较好的光照效果,就只能采取方案②
梯度的本意是一个向量,它的方向与取得最大方向导数的方向一致,而它的模为 方向导数的最大值,也可以理解为函数在该点处沿着该方向变化最快,变化率最大
设函数
在平面区域 D 内具有一阶连续偏导数,则对于每一点
,都可定出一个向量
,该向量称为函数
的梯度,记作
可以证明:
对于高度图 ,其梯度满足
,其中偏导
float2 displacementY_dx = ih * wave.x;
float2 displacementY_dz = ih * wave.z;不过还不够,我们还有两张水平方向的偏移图:
此时不止高度会发生变化,延 x 方向和 z 方向也有一段偏移,这段偏移是
和
,对应的偏导
float2 displacementX_dx = -h * wave.x * wave.x * wave.y;
float2 displacementZ_dz = -h * wave.z * wave.z * wave.y;因此,考虑了水平偏移后,真正的海浪梯度 就为:
看上去这个公式很复杂,其实本质上就是 (高度图对 x 偏导 / 扭曲挤压后的新海面对 x 偏导, 高度图对 z 偏导 / 扭曲挤压后的新海面对 z 偏导)
高度图很好理解,但是平面延 x 和 z 方向的偏移过程可能不是特别好理解:这里可以沿用一张 wiki 上的图片来做参考:

可以看到,在应用水平偏移后,整个海平面就不再是一个线性的平面了,其坐标会被扭曲,甚至会出现挤压(有向面元在变换后面积为负数),
这样再看上面那个极其复杂的海浪梯度向量,其实分子部分就是
分母部分即是对上图右部分的新曲面求偏导,即
也可以以实际应用为例子,直接看最终海洋的顶点变换表现,当你没有应用水平偏移时,最终顶点动画的效果如左:
可以看出顶点网格水平方向上其实是静止的,只有高度在发生变化,而如果应用了水平方向的偏移,最终顶点动画效果如右
差别明显,如果我们把视角调成垂直往下,就可以直接观察到变换后海面的顶点水平分布情况:

搞定梯度后,想要计算法线就很简单了,只需要拿上向量 减去梯度向量,得到的就是法向量,这样下来对于空间中海面上的一点
,即
其精确法线(未考虑归一化)就为
搞定
5.3.4 IFFT 蝶形图生成
第三章已经对 FFT 蝶形算法做过了详细的解析,一个 N = 8 的蝶形算法如下图:

对于 IDFT ,
,令
,其满足性质:
,
,
其中 ,
public void IFFT2D(RenderTexture input, RenderTexture buffer, bool outputToInput = false, bool scale = true, bool permute = false)
{
int logSize = (int)Mathf.Log(size, 2);
bool pingPong = false;
fftShader.SetTexture(KERNEL_HORIZONTAL_STEP_IFFT, PROP_ID_PRECOMPUTED_DATA, precomputedData);
fftShader.SetTexture(KERNEL_HORIZONTAL_STEP_IFFT, PROP_ID_BUFFER0, input);
fftShader.SetTexture(KERNEL_HORIZONTAL_STEP_IFFT, PROP_ID_BUFFER1, buffer);
for (int i = 0; i < logSize; i++)
{
pingPong = !pingPong;
fftShader.SetInt(PROP_ID_STEP, i);
fftShader.SetBool(PROP_ID_PINGPONG, pingPong);
fftShader.Dispatch(KERNEL_HORIZONTAL_STEP_IFFT, size / LOCAL_WORK_GROUPS_X, size / LOCAL_WORK_GROUPS_Y, 1);
}
fftShader.SetTexture(KERNEL_VERTICAL_STEP_IFFT, PROP_ID_PRECOMPUTED_DATA, precomputedData);
fftShader.SetTexture(KERNEL_VERTICAL_STEP_IFFT, PROP_ID_BUFFER0, input);
fftShader.SetTexture(KERNEL_VERTICAL_STEP_IFFT, PROP_ID_BUFFER1, buffer);
for (int i = 0; i < logSize; i++)
{
pingPong = !pingPong;
fftShader.SetInt(PROP_ID_STEP, i);
fftShader.SetBool(PROP_ID_PINGPONG, pingPong);
fftShader.Dispatch(KERNEL_VERTICAL_STEP_IFFT, size / LOCAL_WORK_GROUPS_X, size / LOCAL_WORK_GROUPS_Y, 1);
}
if (pingPong)
{
Graphics.Blit(buffer, input);
}
fftShader.SetInt(PROP_ID_SIZE, size);
fftShader.SetTexture(KERNEL_PERMUTE, PROP_ID_BUFFER0, outputToInput ? input : buffer);
fftShader.Dispatch(KERNEL_PERMUTE, size / LOCAL_WORK_GROUPS_X, size / LOCAL_WORK_GROUPS_Y, 1);
}如果递归计算上面按所有的 X, G, H,总体复杂度为 O(NlogN),例如 N = 8 时,从上图可以看出其递归深度为3,每次计算量都为8,即总共 3x8=24 个蝶形计算单元:

一次蝶形计算单元如上,由于我们可能需要进行多次 IFFT,但事实上由于每次 IFFT 的大小(采样次数)N 是固定的,因此可以预计算所有的 ,并将其复数结果放入一张 logN x N 大小的纹理的 R 和 G 通道中(纹理坐标 x, y 取值从0开始),令
,则对于纹理
位置的值
满足:
还有两个通道 B 和 A,用于放入图中的上一层 IFFT 的索引 a 和 b,a 和 b 的计算公式如下:
对于 N = 8 的情况下,a, b, k 和 d 的取值即如下,纵轴对应 y = 0~8,横轴对应 x = 0~2
- x = 0:a = 0 1 2 3 0 1 2 3 b = 4 5 6 7 4 5 6 7 k = 0 0 0 0 4 4 4 4 d = 4
- x = 1:a = 0 1 4 5 0 1 4 5 b = 2 3 6 7 2 3 6 7 k = 0 0 2 2 4 4 8 8 d = 2
- x = 2:a = 0 2 4 6 0 2 4 6 b = 1 3 5 7 1 3 5 7 k = 0 1 2 3 4 5 6 7 d = 1
对于实际应用的例子中 N = 256 的情况,生成的蝶形纹理如下:

void PrecomputeTwiddleFactorsAndInputIndices(uint3 id : SV_DispatchThreadID)
{
uint b = Size >> (id.x + 1);
float2 mult = 2 * PI * float2(0, 1) / Size;
uint i = (2 * b * (id.y / b) + id.y % b) % Size;
float2 twiddle = ComplexExp(-mult * ((id.y / b) * b));
PrecomputeBuffer[id.xy] = float4(twiddle.x, twiddle.y, i, i + b);
PrecomputeBuffer[uint2(id.x, id.y + Size / 2)] = float4(-twiddle.x, -twiddle.y, i, i + b);
}这个无论是 k 的计算,还是最后索引 a 的计算,可能单看数字不是特别明白,但是没有关系,只要代入到后面的计算场景就会立刻清晰:
如果采样递归的手段计算 FFT,那么逻辑写起来会相对简单一点,因为它是顺着思路的,之前就有举过一道多项式乘法的例子,并且给出了代码,然而由于我们想要 GPU 帮我们并行计算,就不好递归去做,这个时候只能逆过来算,也就是按照蝶形图从左至右(stage 1~3 的顺序)的计算每一个单元:这个时候再看我们关于索引 a, b 以及 k 的计算就好理解多了

当然每一层计算完毕后,索引都会按照该层的计算顺序更新排列
不仅如此,由于我们计算每一个蝶形单元时,只依赖上一个层(stage)的结果,因此每一层的运算都可以并行处理,效率极高:
void HorizontalStepInverseFFT(uint3 id : SV_DispatchThreadID)
{
float4 data = PrecomputedData[uint2(Step, id.x)];
uint2 inputsIndices = (uint2)data.ba;
if (PingPong)
{
Buffer1[id.xy] = Buffer0[uint2(inputsIndices.x, id.y)]
+ ComplexMult(float2(data.r, -data.g), Buffer0[uint2(inputsIndices.y, id.y)]);
}
else
{
Buffer0[id.xy] = Buffer1[uint2(inputsIndices.x, id.y)]
+ ComplexMult(float2(data.r, -data.g), Buffer1[uint2(inputsIndices.y, id.y)]);
}
}对所有行来一次横向 FFT 后,就是所有列的纵向 FFT,由于对应的计算方式几乎完全一致,就不再做详细介绍了
5.3.5 收尾
到此整个 FFT Ocean 的物理计算流程就要到尾声了,经过 IFFT 计算后,我们就能通过后续纹理合并,以及向量计算拿到:
- 一张海浪高度图
- 水平偏移图
- 法线图
其中①和②可以合到一张纹理中,然后运用到顶点变换:
float3 displacement = 0;
displacement += tex2Dlod(_Displacement_c0, worldUV / LengthScale0) * lod_c0;
v.vertex.xyz += mul(unity_WorldToObject, displacement);法线图的计算则如下
float4 derivatives = tex2D(_Derivatives_c0, IN.worldUV / LengthScale0);
float2 slope = float2(derivatives.x / (1 + derivatives.z),
derivatives.y / (1 + derivatives.w));
float3 worldNormal = normalize(float3(-slope.x, 1, -slope.y));搞定,效果放在了文章最前面,代码的算法部分实际上是直接借鉴的 gasgiant/FFT-Ocean,当然为了能让高配手机上也能运行,以及要做非真实感的海洋,还是要做不少工作的,例如着色,水体交互、海浪泡沫、性能优化等等。考虑到本篇的原意只是介绍 FT 及其在游戏开发领域的应用,就先在这画上句号吧



![[附源码]Python计算机毕业设计电影网站系统设计Django(程序+LW)](https://img-blog.csdnimg.cn/8db40f659be64277bf73b35c426d3a0a.png)
![OpenAi[ChatGPT] 使用Python对接OpenAi APi 实现智能QQ机器人-学习详解篇](https://img-blog.csdnimg.cn/img_convert/ffb49a865373b32b1690f0c4a22dd7f9.png)

![[附源码]Node.js计算机毕业设计大悦城电竞赛事管理系统Express](https://img-blog.csdnimg.cn/114da38b708642cdbb855c0a178b8474.png)