安装好机器人工具箱,代码复制可用,按需修改参数
1.建模
%%%%%%%%SCARA机器人仿真模型
l=[0.457 0.325];
L(1)= Link('d',0,'a',l(1),'alpha',0,'standard','qlim',[-130 130]*pi/180);%连杆1
L(2)=Link('d',0,'a',l(2),'alpha',pi,'standard','qlim',[-145 145]*pi/180);%连杆2
L(3)=Link('theta',0,'a',0,'alpha',0,'standard','qlim',[0 0.3]);%连杆3
L(4)= Link('d',0,'a',0,'alpha',0,'standard','qlim',[-360 360]*pi/180);%连杆4
scara=SerialLink(L,'name','SCARA Robot');%建立 SCARA 机器人模型
q0=[0 0 0 0];%初始关节变量
scara.plot(q0);%绘制机器人结构
scara.teach(q0);%驱动机器人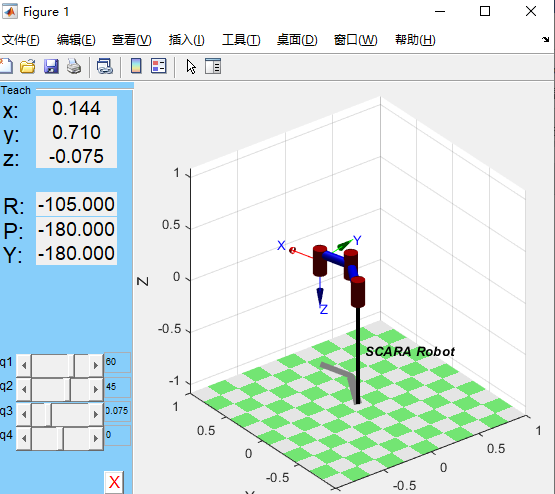
2.工作空间
%%%%%%%%工作空间绘制
qL=scara.qlim;%关节运动范围
N=10000;%随机数数量
ws_q=zeros(N,4);%定义N个关节变量向量组成的关节变量矩阵q
a=rand(size(ws_q)); %生成元素数值在0~1之间的与q同维度的随机矩阵
for j=1:N
for i=1:4
ws_q(j,i)=qL(i,1)+(qL(i,2)-qL(i,1))*a(j,i);%给矩阵q赋q范围内的随机值,以得到足够多的给定范围(矩阵ql)内的机器人的关节变量(矩阵q)值
end
end
%求机器人位置坐标
ws_x=l(1)*cos(ws_q(:,1))+l(2)*cos(ws_q(:,1)+ ws_q(:,2));%机器人末端x坐标值
ws_y=l(1)*sin(ws_q(:,1))+l(2)*sin(ws_q(:,1)+ws_q(:,2));%机器人末端了坐标值
ws_z=- ws_q(:,3);%机器人末端z坐标值
figure('Name','Scara机器人工作空间')
plot3(ws_x,ws_y,ws_z,'r.')
grid;
xlabel('x');
ylabel('y');
zlabel('z');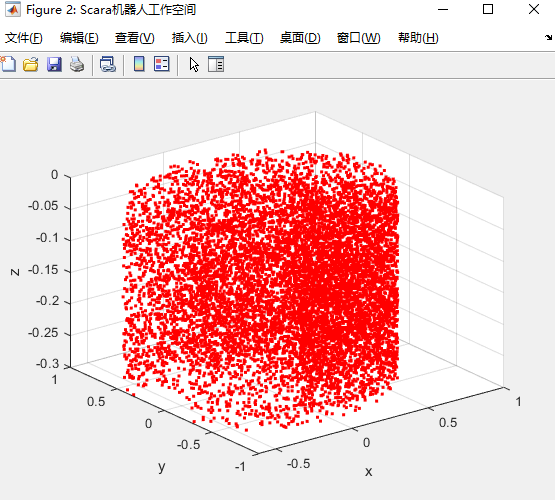
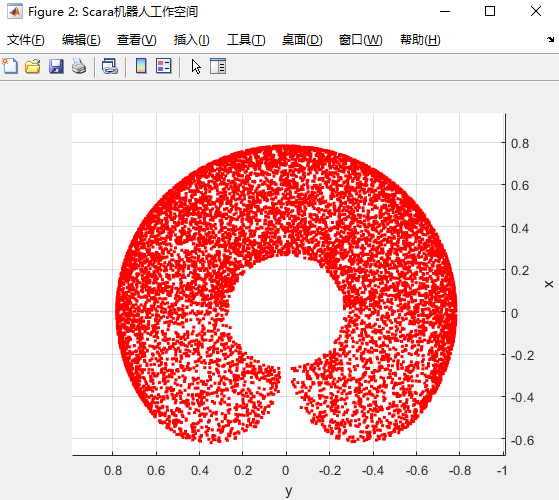
旋转一下:
3.运动轨迹:
%%%%%%%%轨迹规划
qA=[0 0 0 0];%起始点关节变量值
qB=[0.7 1.2 0.15 2];%终止点关节变量值
t=0:0.05:2;%产生时间向量
[q,qd,qdd]=jtraj(qA,qB,t);%jtraj()为构建轨迹命令,得到各关节的位移、速度和加速度
%%%%%%%%正运动学仿真
T=double(scara.fkine(q));%正运动学仿真函数
[x,y,z]=transl(T);%机器人末端x、y、z坐标值
%%%%%%%%绘制曲线图
figure('Name','"SCARA Robot"机器人正运动学演示');
plot(scara,q)
figure('Name','机器人末端运动轨迹')
plot3(x,y,z,'r-o','MarkerFaceColor','r');
grid;
xlabel('x');ylabel('y');zlabel('z');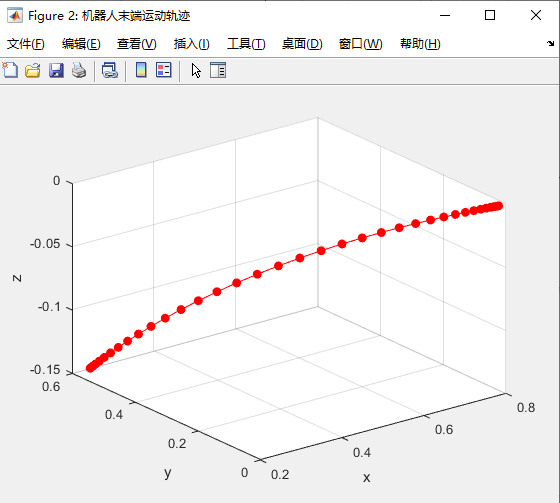
4.各关节位移、速度、加速度:
figure('Name','各关节的位移、速度和加速度曲线');
subplot(3,4,1);
plot(t,q(:,1)); %得到关节1的位移曲线
title('关节1'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,5);
plot(t,qd(:,1)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,9);
plot(t,qdd(:,1)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');
subplot(3,4,2);
plot(t,q(:,2)); %得到关节1的位移曲线
title('关节2'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,6);
plot(t,qd(:,2)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,10);
plot(t,qdd(:,2)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');
subplot(3,4,3);
plot(t,q(:,3)); %得到关节1的位移曲线
title('关节3'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,7);
plot(t,qd(:,3)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,11);
plot(t,qdd(:,3)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');
subplot(3,4,4);
plot(t,q(:,4)); %得到关节1的位移曲线
title('关节4'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,8);
plot(t,qd(:,4)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,12);
plot(t,qdd(:,4)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');
汇总:
%%%%%%%%SCARA机器人仿真模型
l=[0.457 0.325];
L(1)= Link('d',0,'a',l(1),'alpha',0,'standard','qlim',[-130 130]*pi/180);%连杆1
L(2)=Link('d',0,'a',l(2),'alpha',pi,'standard','qlim',[-145 145]*pi/180);%连杆2
L(3)=Link('theta',0,'a',0,'alpha',0,'standard','qlim',[0 0.3]);%连杆3
L(4)= Link('d',0,'a',0,'alpha',0,'standard','qlim',[-360 360]*pi/180);%连杆4
scara=SerialLink(L,'name','SCARA Robot');%建立 SCARA 机器人模型
q0=[0 0 0 0];%初始关节变量
scara.plot(q0);%绘制机器人结构
scara.teach(q0);%驱动机器人
%%%%%%%%工作空间绘制
qL=scara.qlim;%关节运动范围
N=10000;%随机数数量
ws_q=zeros(N,4);%定义N个关节变量向量组成的关节变量矩阵q
a=rand(size(ws_q)); %生成元素数值在0~1之间的与q同维度的随机矩阵
for j=1:N
for i=1:4
ws_q(j,i)=qL(i,1)+(qL(i,2)-qL(i,1))*a(j,i);%给矩阵q赋q范围内的随机值,以得到足够多的给定范围(矩阵ql)内的机器人的关节变量(矩阵q)值
end
end
%求机器人位置坐标
ws_x=l(1)*cos(ws_q(:,1))+l(2)*cos(ws_q(:,1)+ ws_q(:,2));%机器人末端x坐标值
ws_y=l(1)*sin(ws_q(:,1))+l(2)*sin(ws_q(:,1)+ws_q(:,2));%机器人末端了坐标值
ws_z=- ws_q(:,3);%机器人末端z坐标值
figure('Name','Scara机器人工作空间')
plot3(ws_x,ws_y,ws_z,'r.')
grid;
xlabel('x');
ylabel('y');
zlabel('z');
%%%%%%%%轨迹规划
qA=[0 0 0 0];%起始点关节变量值
qB=[0.7 1.2 0.15 2];%终止点关节变量值
t=0:0.05:2;%产生时间向量
[q,qd,qdd]=jtraj(qA,qB,t);%jtraj()为构建轨迹命令,得到各关节的位移、速度和加速度
%%%%%%%%正运动学仿真
T=double(scara.fkine(q));%正运动学仿真函数
[x,y,z]=transl(T);%机器人末端x、y、z坐标值
%%%%%%%%绘制曲线图
figure('Name','"SCARA Robot"机器人正运动学演示');
plot(scara,q)
figure('Name','机器人末端运动轨迹')
plot3(x,y,z,'r-o','MarkerFaceColor','r');
grid;
xlabel('x');ylabel('y');zlabel('z');
figure('Name','各关节的位移、速度和加速度曲线');
subplot(3,4,1);
plot(t,q(:,1)); %得到关节1的位移曲线
title('关节1'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,5);
plot(t,qd(:,1)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,9);
plot(t,qdd(:,1)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');
subplot(3,4,2);
plot(t,q(:,2)); %得到关节1的位移曲线
title('关节2'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,6);
plot(t,qd(:,2)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,10);
plot(t,qdd(:,2)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');
subplot(3,4,3);
plot(t,q(:,3)); %得到关节1的位移曲线
title('关节3'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,7);
plot(t,qd(:,3)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,11);
plot(t,qdd(:,3)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');
subplot(3,4,4);
plot(t,q(:,4)); %得到关节1的位移曲线
title('关节4'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,8);
plot(t,qd(:,4)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,12);
plot(t,qdd(:,4)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');