近年来,自动驾驶成为了当下最热门的话题。随着自动驾驶技术的发展,作为其关键传感器之一的毫米波雷达,也得到了广泛关注。但就目前来看,海外巨头公司主导着全球毫米波雷达产业的发展,其中,大陆ARS540更以九项领先的绝对优势领跑全球毫米波雷达技术。
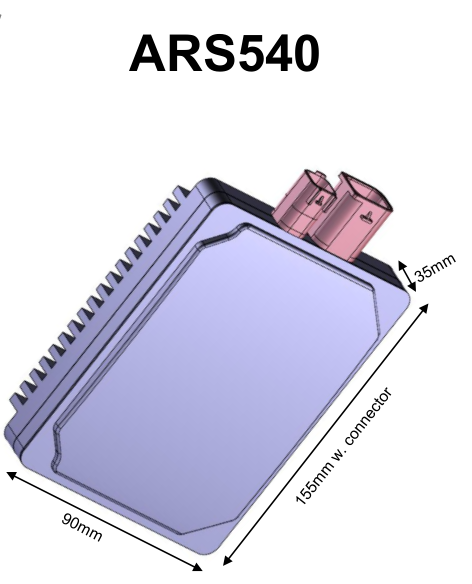
图为:大陆ARS540 首先,ARS540是分辨率最高的毫米波雷达,地平经度Azimuth或者说水平分辨率达1.2°,绝大多数毫米波雷达水平分辨率只有5°,ARS540是普通毫米波雷达水平分辨率的5倍。 其次,ARS540是具备能够真正测量目标高度的毫米波雷达,也就是其垂直分辨率Elevation较高,达到了2.3°。
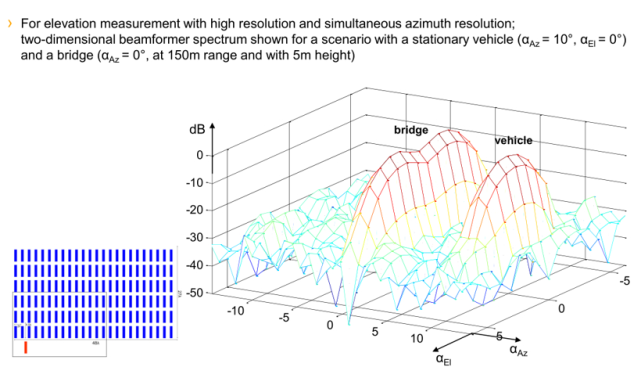
图为:ARS540的高度测量 第三,ARS540有效距离在水平视场角(FOV)在100°情况下高达300米,其他毫米波雷达有效距离可达250米,但FOV会缩到只有8-10°,远低于ARS540的100°。 第四,ARS540是能够输出图像的毫米波雷达,大陆汽车称之为Rdar Detection Image Output RDI,效果直逼8线激光雷达。 第五,ARS540使用微多普勒技术,是可以检测道路弱势群体使用者VRU(如老年人和儿童)的毫米波雷达。 第六,ARS540是使用SAR合成孔径技术提高近距离分辨率的毫米波雷达,在10米范围内,ARS540可以使用SAR技术提高角分辨率。 第七,ARS540是不过滤静态目标的毫米波雷达。目前,绝大多数毫米波雷达为降低误报率,会过滤掉静态目标,ARS540具备超高分辨率,同时能检测物体高度,误报率大幅降低,所以保留了静态目标。 第八,ARS540是具备复杂交通场景下轨迹跟踪与预测的毫米波雷达。 第九,ARS540可以探测到隐藏的车辆。ARS540探测到隐藏车辆的几率从上一代最先进产品ARS430的40%,提升至80%,而大部分毫米波雷达只能做到20%。

侦查隐藏车辆(车队)
ARS540取得绝对第一性能的背后是其复杂的设计。
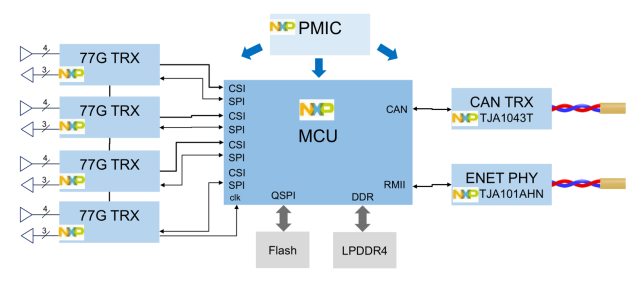
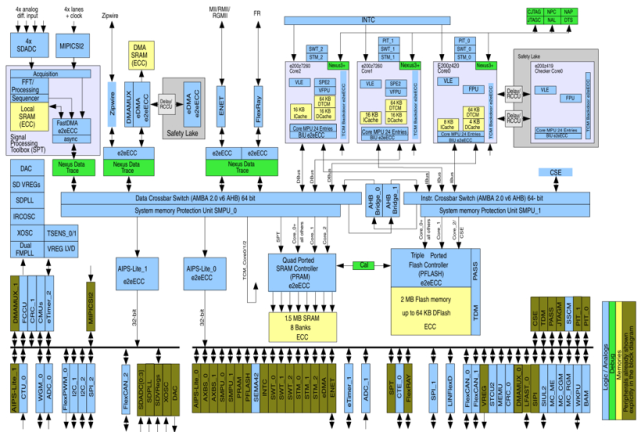
图为ARS540结构示意图 结构上,ARS540采用4片级联的形式,将4片NXP的77GHz毫米波雷达收发器(即MMIC)MR3003级联,每个MR3003是3发4收,4片就是12发16收,目前绝大多数毫米波雷达都是采用单片收发器,通常只有3发4收,也就是只有12个虚拟通道,而ARS540高达192个虚拟通道,分辨率大大提高。可以称之为图像雷达。

图为图像雷达注解;图片来源:恩智浦 目前绝大多数毫米波雷达都是处于第一阶段,即1片MMIC。目前大部分前向主毫米波雷达主要由大陆和博世垄断,中低端车型使用大陆的ARS4B、ARS408或ARS410,其核心都是一片比较老的NXP收发器MR2001,如特斯拉Model 3为节约成本使用最便宜的ARS4B,其有效距离最多只有170米,中国本土品牌多使用ARS410,有效距离250米。国外高端车型则使用ARS510,核心为一片最新的MR3003。博世在国内主推MRR1 PLUS,使用英飞凌的分离型收发器RRN7745P/RTN7735P。长距离的LRR4使用一片MR2001。
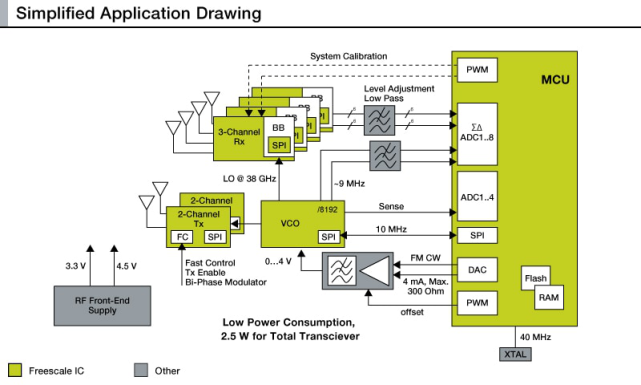
图为MR2001系统示意图。MR2001是MR3003的上一代产品,也是使用最广泛的长距离毫米波雷达收发器,博世、大陆集团、安波福、奥托立夫均有使用。

图为MR3003内部框架图 从上面两张图中,我们可以看到MR3003相比MR2001有很大变化,首先是MR3003集成了ADC即模拟数字变换,MR2001需要经过低通滤波器过滤后将模拟数据传输给MCU再处理,这当中信号或有损失,影响了精度,MR3003集成了ADC变换,不再将ADC放在MCU中,采用MIPI CSI2或LVDS输出,可以输出高带宽,为图像输出打下基础,也提高了信噪比,也就是分辨率和精度。其次是增加了功能安全模块。再次是集成了PLL锁相环电路,而不是MR2001那样外置VCO。成本更低,可靠性更高。最后,MR2001是4发3收天线设计,MR3003是3发4收天线设计。 MCU方面,ARS540也采用新一代的S32R274,而对应MR2001的一般是MPC5773。
图为S32R274的内部框架图 S32R274采用三核设计,两个e200z7260负责计算,一个e200z420负责安全。最高可达ASIL-D级安全应用。在通讯接口方面具备最大灵活度,远比上一代产品强,首先是增加了对以太网的支持,拥有以太网MAC,支持超过百兆以上以太网RGMII,可以输出图像。有一对Flexray总线通道,支持128位信息缓冲。有三个柔性CAN,可以支持CAN-FD。还有最高达320Mbps的Zipwire高速串行通讯。默认输出还是CAN,备选为以太网输出。

雷达信号处理示意图;图片来源:恩智浦 算法方面,主要是加强了CPI和DOA。Chirp是啁啾(读音:“周纠”),是通信技术有关编码脉冲技术中的一种术语,是指对脉冲进行编码时,其载频在脉冲持续时间内线性地增加,当将脉冲变到音频地,会发出一种声音,听起来像鸟叫的啁啾声,故名“啁啾”。FFT是快速傅里叶变换,CFAR是Constant False-Alarm Rate恒虚警率的缩写。在雷达信号检测中,当外界干扰强度变化时,雷达能自动调整其灵敏度,使雷达的虚警概率保持不变。具有这种特性的接收机称为恒虚警接收机。DOA(direction of arrival)估计算法是核心,这种算法通常需要比较高的算力,NXP或者说Freescale的Power架构比较合适,ARM架构则成本较高。DOA估计(或波达方向估计):将接受信号进行空间傅里叶变换(空间傅里叶变换和离散时间傅里叶变换的区别是,空间傅里叶变换的求和是对阵元空间位置m,而时域傅里叶变换的求和变量时离散时间n),进而取模的平方得到空间谱,估计出信号的到达方向(空间谱的最大值对应的相位φ,再根据定义φ=2πdsinθ/λ,计算θ)。 ARS540采用双MCU设计,即两片S32R274。每一片S32R274连接两片MR3003。某种意义上讲ARS540等于4个ARS510雷达放在一个盒子里。这个难度远高于一个雷达,雷达是超高频元件,互相之间很容易出现干扰,其中很多诀窍不是靠电脑仿真就能解决的,需要长时间的经验累积,不仅要有射射频电子领域的经验,还要有对材料和机械结构领域的经验。ARS540也是第一个采用级联设计的量产毫米波雷达。不仅设计很具有挑战性,在生产工艺也是如此,外壳的材料厚度都会影响雷达性能,这些导致雷达一致性在生产工艺上面临巨大挑战,很多领域都是靠经验积累才能解决的,中国不缺优秀的设计师,但是经验丰富的一线员工则完全没有。 随着毫米波雷达性能的增长,对激光雷达地位开始产生威胁,特别是4线激光雷达。未来如果实现6个或8个单位级联,那么毫米波雷达将对16线激光雷达产生威胁。与此同时,毫米波雷达还在性价比和车规方面拥有压倒性优势,这也就意味着,未来激光雷达要着力提高分辨率才能保证其地位。

![[附源码]JAVA毕业设计小说阅读网站(系统+LW)](https://img-blog.csdnimg.cn/051397adba5d4a5a9be3ce0a8d91ec47.png)




![[附源码]计算机毕业设计的花店售卖系统的设计与实现Springboot程序](https://img-blog.csdnimg.cn/f7120909fcc843e48dafb0a828db689e.png)