十七、滑模控制器设计原理
滑模运动包括趋近运动和滑模运动两个过程。系统从任意初始状态趋向切换面,直到到达切换面的运动称为趋近运动,即趋近运动为的过程。根据滑模变结构原理,滑模可达性条件仅保证由状态空间任意位置运动点在有限时间内到达切换面的要求,而对于趋近运动的具体轨迹未作任何限制,采用趋近律的方法可以改善趋近运动的动态品质。
17.1 基于名义模型的机器人趋近律设计
二力臂机械手的名义模型为
其中为
正定质量惯性矩阵,
为哥氏力,离心力和重力之和。
实际对象为
将建模误差、参数变化及其他不确定因素视为外界扰动,则
其中
系统误差为
切换函数为
则
取指数趋近律为
经过整理,得到控制律为
17.2 仿真实例
17.2.1 单关节机器人仿真
单关节机器人的动态方程为
取位置指令为,simulink结构图、力矩图和仿真结果如图1,2,3所示。
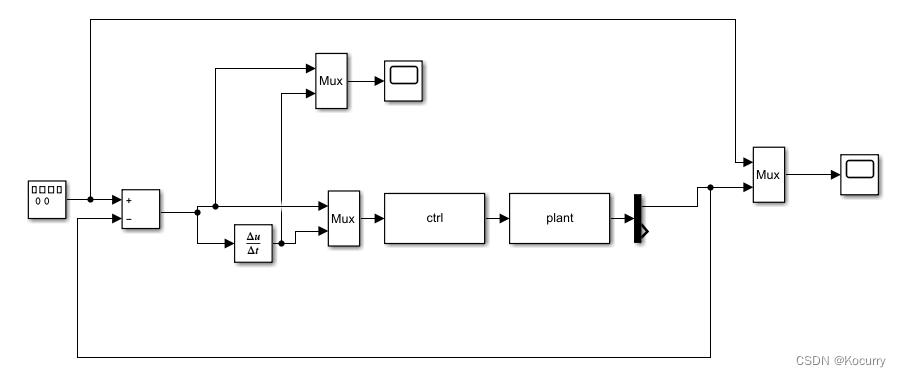
图1 simulink结构图
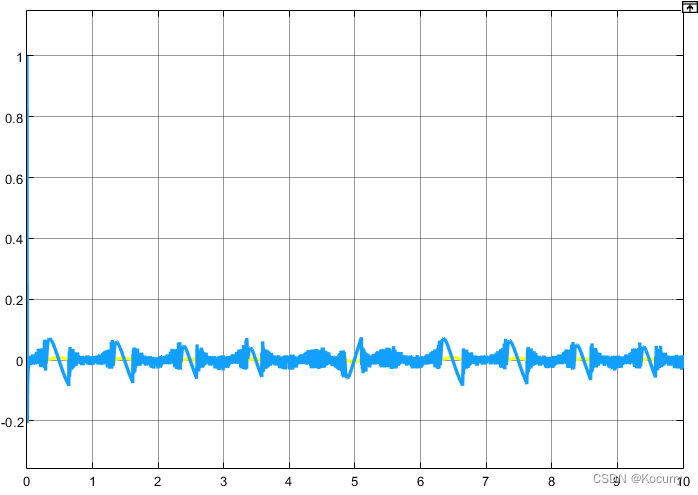
图2 单关节力矩
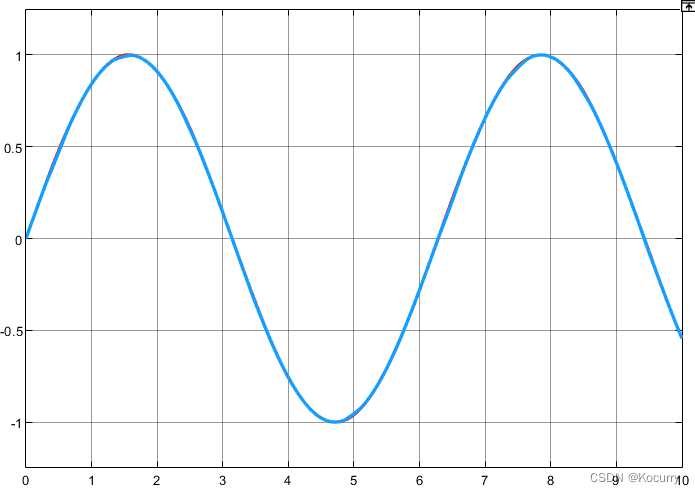
图3 单关节轨迹
17.2.2 二关节机器人仿真
二关节机器人系统的动力学模型为
二关节的位置指令分别为和
,simulink结构图和仿真结果如图4,5,6所示。
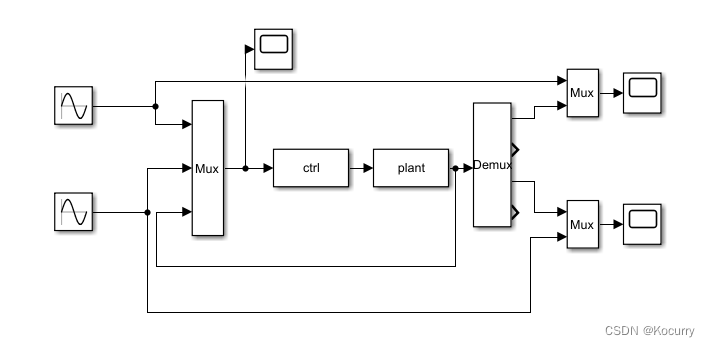
图4 simulink结构图
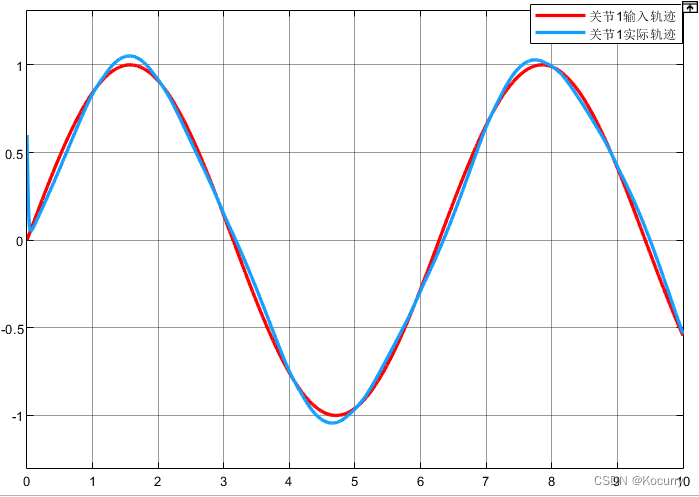
图5 关节1轨迹
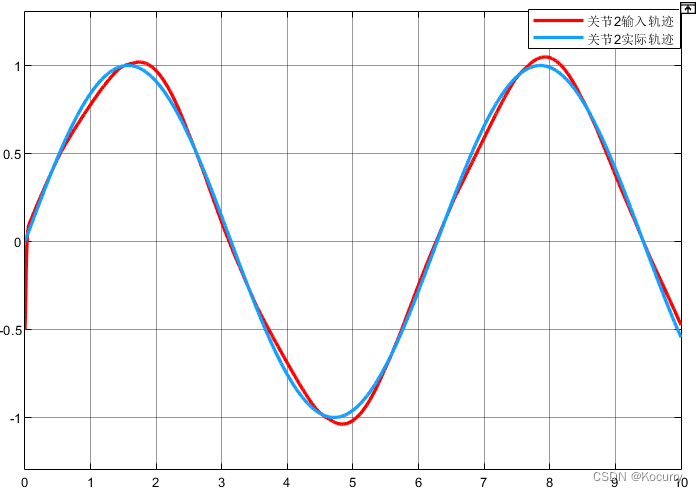
图6 关节2轨迹
经分析,所设计的控制律和控制器均符合要求,机器人关节的实际轨迹和期望轨迹较为贴合,仿真效果好。