1、原理介绍
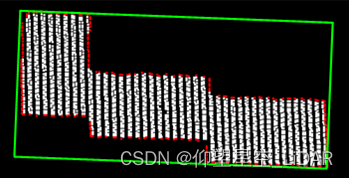
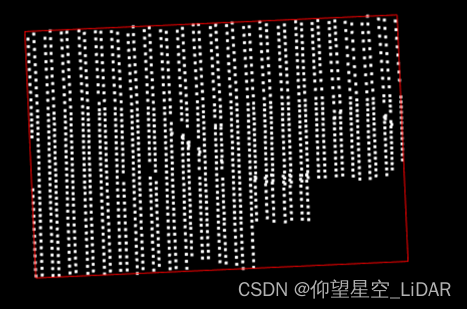
一簇点云的最小外包矩形(Minimum Bounding Rectangle,MBR),是指用一个矩形将该簇点云框起来,所有点云数据在矩形框内。如下图所示为一个矩形框刚好将点云数据全部包围。
下面给出一种基于最大重叠度的最小外包矩形,该方法依据任意相邻点计算得到多个矩形,选择轮廓点与该矩形重叠度最大的矩形作为最小外包矩形。具体步骤如下:
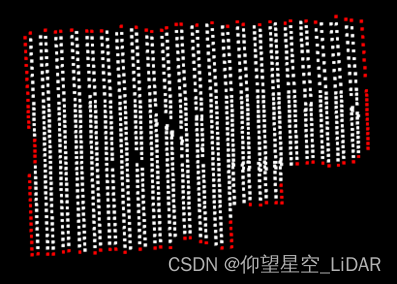
(1)对点云进行边缘点提取,并对边缘点进行排序,得到有序边缘点;
(2)对于每个轮廓点,选择与其相邻的下一个近邻点构成一条直线,以该直线与其垂直的直线确定最小外包矩形方向,计算得到一个最小外包矩形。
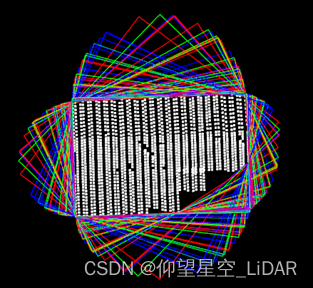
(3)选择下一个轮廓点,重复步骤(2)即可得到下一个最小外包矩形。遍历所有的轮廓点即可得到一些列最小外包矩形。
(4)由上述获取的最小外包矩形,计算边缘点到矩形四条边的距离,若到四条边的垂直距离均大于设定阈值,则为不重叠点,否则为重叠点。
如下图中p点,计算其到四条边的距离示意图。
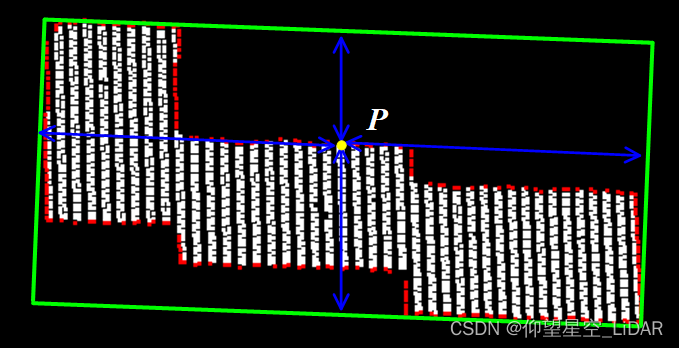
任意相邻点确定的最小外包矩形,如下图所示。从中选择重叠度最大的外包矩形,即可得到理想的外包矩形。
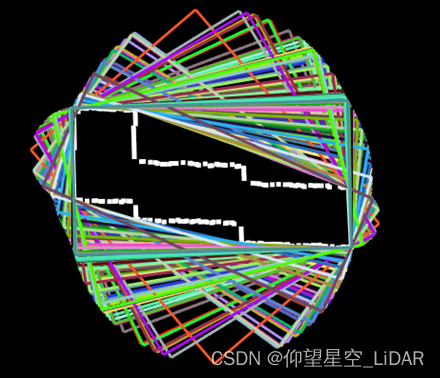

2、测试及结果
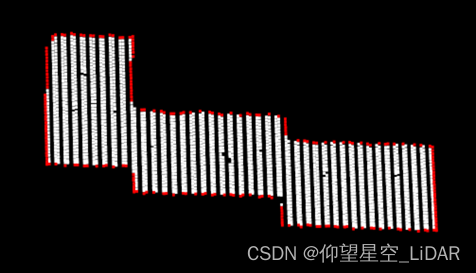
根据上述原理,基于PCL、C++进行实现。提取的边缘点、所有轮廓线、最大重叠度矩形结果如下图所示。
部分计算代码如下:
//计算重叠度
double RateOverlapBoundarySides(vector<pcl::PointXYZ> boundarypoints, Rect onerectangle, double DsThres)
{
LinePara Line1, Line2, Line3, Line4;
Line1 = CalculateLine(onerectangle.leftbottom, onerectangle.leftup);
Line2 = CalculateLine(onerectangle.leftup, onerectangle.rightup);
Line3 = CalculateLine(onerectangle.rightup, onerectangle.rightbottom);
Line4 = CalculateLine(onerectangle.leftbottom, onerectangle.rightbottom);
vector<pcl::PointXYZ>inliers;//重叠点与非重叠点
for (int i = 0; i < boundarypoints.size(); i++)
{
vector<double> Dsvec;
Dsvec.push_back(Point2Dline(Line1, boundarypoints[i]));
Dsvec.push_back(Point2Dline(Line2, boundarypoints[i]));
Dsvec.push_back(Point2Dline(Line3, boundarypoints[i]));
Dsvec.push_back(Point2Dline(Line4, boundarypoints[i]));
//选择最小值
double minds = getMin_vector(Dsvec);
if (minds < DsThres)
{
inliers.push_back(boundarypoints[i]);
}
}
double result = (float)inliers.size() / boundarypoints.size();
return result;
}
//获取重叠度最大的矩形
// DsThres 距离阈值,确定该点是否为重叠点
Rect MaxOverlapBoundaryRec(vector<pcl::PointXYZ> boundarypoints, vector<Rect> onerectangle, double DsThres)
{
vector<double> ratevec;//百分比
for (int i = 0; i < onerectangle.size(); i++)
{
ratevec.push_back(RateOverlapBoundarySides(boundarypoints, onerectangle[i], DsThres));
}
double maxindex = GetIndexOfMax(ratevec);
return onerectangle[maxindex];
}
该程序包括三个测试main函数,分别为测试边缘点检测、所有矩形可视化显示、最小外包矩形。结果如下:


使用该cpp文件时,直接在配置好PCL环境的工程文件下,添加文件“最小外包矩形test”即可。
代码下载链接:https://download.csdn.net/download/qq_32867925/88024377
![[工业互联-19]:如何在QT中增加SOEM主站](https://img-blog.csdnimg.cn/b6083a802c954b0f9bb57f1e992b2477.png)