目录
第1章 TwinCAT简介
第2章 软件架构
第3章 应用程序架构
第1章 TwinCAT简介
TwinCAT是由德国Beckhoff公司开发的一套功能强大的自动化软件平台。
它是一个集成的开发环境,用于实现实时控制、PLC编程、运动控制、HMI(人机界面)设计和数据采集等应用。TwinCAT广泛应用于工业自动化、机械控制、过程控制和实时系统等领域。
TwinCAT的主要特点和功能包括:
-
PLC编程:TwinCAT提供了一个功能全面的PLC编程工具,支持IEC 61131-3标准的编程语言,如LD(Ladder Diagram)、FBD(Function Block Diagram)、IL(Instruction List)、ST(Structured Text)和SFC(Sequential Function Chart)。
-
运动控制:TwinCAT拥有强大的运动控制功能,可以实现多轴运动控制和同步,支持伺服驱动器、步进驱动器和直线电机等设备。它提供了丰富的运动控制库和功能模块,可满足各种复杂控制需求。
-
HMI设计:TwinCAT具有灵活的HMI设计工具,可用于创建直观的人机界面。它支持多种HMI元素,如按钮、指示灯、图表、报警和趋势图等,可以与实时数据通信和交互。
-
实时控制:TwinCAT基于实时操作系统(Real-time Operating System,RTOS)的概念,具备高性能和可靠性。它支持实时数据传输和多任务处理,可以实现快速而精确的控制操作。
-
数据采集和处理:TwinCAT集成了数据采集和处理功能,可以连接各种传感器和设备,并实时采集、记录和处理数据。它支持与外部数据库和云平台的集成,以实现数据分析和监控,数据分析通过外部的云平台实现,数据处理由TwinCAT实现。
使用TwinCAT进行开发时,可以使用TwinCAT Engineering工具进行配置、编程和调试。该工具提供了直观的界面和丰富的功能,可用于配置硬件设备、编写PLC程序、定义运动控制参数、创建HMI界面等。
EtherCAT主站方案实现一般都采用倍福公司的TwinCAT, TwinCAT实现了强大的EtherCAT主站功能,从站XML表配置、EEPROM配置文件操作、扫描EtherCAT从站
因为TwinCAT是基于Windows风格,拥有较好的人机交互界面,功能强大,非常适合上位机控制窗口的开发,但TwinCAT运行于Windows环境下,而且TwinCAT和Windows系统需要付费才能商业化应用,价格较高,根
总的来说,TwinCAT是一个功能强大的自动化软件平台,集成了PLC编程、运动控制、HMI设计和数据采集等功能。它为工业自动化和控制系统提供了综合的解决方案,并且具有易用性、灵活性和可扩展性。
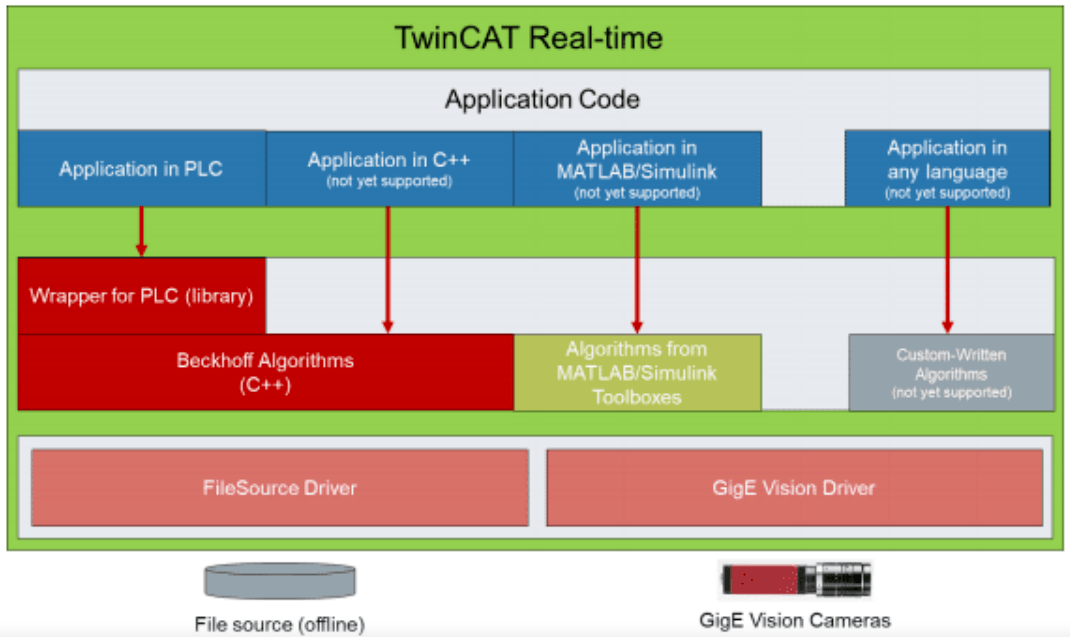
第2章 软件架构

TwinCAT是Beckhoff公司开发的一套自动化软件平台,其架构主要由以下几个部分组成:
-
运行时TwinCAT(TwinCAT Runtime):TwinCAT Runtime是TwinCAT系统的核心组件,它是一个实时操作系统(Real-time Operating System,RTOS),提供实时性能和多任务处理功能。TwinCAT Runtime负责管理EtherCAT任务调度、实时数据通信、驱动设备以及处理各种控制操作。
-
TwinCAT Engineering工程化工具:TwinCAT Engineering是用于配置、编程和调试TwinCAT系统的集成开发环境。它包括多个模块,如PLC编程(TwinCAT PLC)、运动控制(TwinCAT NC)、HMI设计(TwinCAT HMI)、数据采集和处理(TwinCAT ADS)等。TwinCAT Engineering提供直观的界面和丰富的功能,方便开发人员进行系统配置和应用开发。
-
TwinSAFE(TwinCAT Safety):TwinSAFE是TwinCAT的安全功能模块,用于实现安全控制和监测。它提供了安全PLC编程和运行时支持,可用于设计和执行安全功能,如紧急停止、安全测量和安全监测。
-
TwinCAT ADS(Automation Device Specification):TwinCAT ADS是一种高性能的数据通信机制,用于在TwinCAT系统中实现实时数据传输和设备通信。它使用高效的二进制通信协议,支持点对点通信和发布/订阅机制。TwinCAT ADS提供了一套API,用于在开发过程中与TwinCAT系统进行数据交换和控制操作。ADS用于主机应用程序或WinCAT主站之间通信,不同的TwinCAT主站组成一个TwinCAT系统。
-
通信接口(Communication Interfaces):TwinCAT支持多种通信接口,如以太网(EtherCAT、Ethernet/IP、PROFINET)、串行通信(RS232、RS485)、CAN总线等。这些通信接口可以用于连接和与外部设备(传感器、执行器)进行数据交换和控制。通信接口用于TwinCAT与外部设备通信。
通过这些组件和功能,TwinCAT实现了一个完整的自动化控制系统。它提供了一个统一的开发环境和运行时平台,可用于配置和编程各种控制任务,实现实时数据通信和控制操作,并与外部设备进行集成。TwinCAT的灵活架构使其适用于各种工业自动化和控制应用。
第3章 应用程序架构

TwinCAT应用程序架构可以根据具体的应用需求和系统设计进行灵活配置。
以下是一种常见的TwinCAT应用程序架构示例:
-
硬件接口层(Hardware Interface Layer):此层与硬件设备进行通信,并提供对各种传感器、驱动器和I/O设备的接口。通过与硬件接口层的通信,TwinCAT可以读取和写入数据,控制运动和实时采集数据。
-
实时控制层(Real-time Control Layer):该层包含主要的控制逻辑和算法,负责实时控制和决策。它使用TwinCAT的PLC编程和运动控制功能,根据输入数据和运算逻辑生成输出信号,控制执行器的运动、逻辑和状态。
-
数据处理层(Data Processing Layer):此层负责处理数据和实时采集的信息。它可以对采集的数据进行处理、分析、存储和提供实时反馈。数据处理层还可以与其他系统集成,并将处理后的数据传递给其他业务系统进行进一步处理。
-
HMI层(Human-Machine Interface Layer):HMI层提供了与操作人员进行交互和监视系统的界面。使用TwinCAT HMI工具,可以创建可视化界面、报警、趋势图和操作控制面板等,以便操作人员能够直观地监控和操作系统。
-
通信接口层(Communication Interface Layer):该层负责与外部系统和网络进行通信。通过TwinCAT ADS(Automation Device Specification)以太网协议,可以与其他TwinCAT系统、上层系统、数据采集设备和数据库等进行数据交换和通信。
TwinCAT应用程序架构可以根据具体应用的需求进行灵活调整和扩展。对于更复杂的系统,可能还包括安全控制模块、远程访问和监控模块等。这种架构提供了一个可伸缩和模块化的设计,使得TwinCAT系统能够适应多样化的应用场景。