Python编程
这里主要针对有一定基础的读者,在Python编程中,掌握基础语法和数据类型是非常重要的。它们是构建程序的基石,是提供解决问题和开发应用的工具。在这里,我将简单介绍一些常用的语法和数据类型。
一、环境搭建
详细请参考此篇纯净Python环境的安装以及配置PyCharm编辑器。
二、基础语法
(1)If ... Else 语句
else示例
a = 200
b = 33
if b > a:
print("b is greater than a")
elif a == b:
print("a and b are equal")
else:
print("a is greater than b")简写 If ... Else
a = 2
b = 330
print("A") if a > b else print("B")(2)While 循环
break 语句
如果使用 break 语句,即使 while 条件为真,我们也可以停止循环:
i = 1
while i < 6:
print(i)
if i == 3:
break
i += 1continue 语句
如果使用 continue 语句,我们可以停止当前的迭代,并继续下一个:
i = 0
while i < 6:
i += 1
if i == 3:
continue
print(i)(3)For 循环
range() 函数
for x in range(6):
print(x)嵌套循环
adj = ["red", "big", "tasty"]
fruits = ["apple", "banana", "cherry"]
for x in adj:
for y in fruits:
print(x, y)pass 语句
for x in [0, 1, 2]:
passbreak 语句
fruits = ["apple", "banana", "cherry"]
for x in fruits:
print(x)
if x == "banana":
breakcontinue 语句
fruits = ["apple", "banana", "cherry"]
for x in fruits:
if x == "banana":
continue
print(x)三、集合数据类型
Python 编程语言中有四种集合数据类型:
- 列表(List) 是一种有序和可更改的集合。允许重复的成员。
- 元组(Tuple) 是一种有序且不可更改的集合。允许重复的成员。
- 集合(Set) 是一个无序和无索引的集合。没有重复的成员。
- 词典(Dictionary) 是一个无序,可变和有索引的集合。没有重复的成员。
这里我们重点来了解列表。
列表
列表是一个有序且可更改的集合。在 Python 中,列表用方括号编写。
thislist = ["apple", "banana", "cherry"]
print(thislist)
print(len(thislist))索引
thislist = ["apple", "banana", "cherry", "kiwi", "melon", "mango"]
print(thislist[-1])
print(thislist[1])
print(thislist[2:5])
print(thislist[:4])
print(thislist[2:])
print(thislist[-4:-1])
for x in thislist:
print(x)
if "apple" in thislist:
print("Yes, 'apple' is in the fruits list")
thislist.append("orange")
print(thislist)
thislist.remove("banana")
thislist.pop()元组、集合、词典可通过文章末尾的资源共享进行学习
四、函数
调用函数
如需调用函数,请使用函数名称后跟括号:
def my_function():
print("Hello from a function")
my_function()参数
信息可以作为参数传递给函数。
参数在函数名后的括号内指定。您可以根据需要添加任意数量的参数,只需用逗号分隔即可。
下面的例子有一个带参数(fname)的函数。当调用此函数时,我们传递一个名字,在函数内部使用它来打印全名:
def my_function(fname):
print(fname + " Refsnes")
my_function("Emil")
my_function("Tobias")
my_function("Linus")返回值
如需使函数返回值,请使用 return 语句:
def my_function(x):
return 5 * x
print(my_function(3))
print(my_function(5))pass 语句
函数定义不能为空,但是如果您出于某种原因写了无内容的函数定义,请使用 pass 语句来避免错误。
def myfunction():
passlambda 函数
语法
lambda arguments : expression
def myfunc(n):
return lambda a : a * n五、类和对象
Python 是一种面向对象的编程语言。
Python 中的几乎所有东西都是对象,拥有属性和方法。
类(Class)类似对象构造函数,或者是用于创建对象的"蓝图"。
创建类
如需创建类,使用 class 关键字。
使用名为 x 的属性,创建一个名为 MyClass 的类:
class MyClass:
x = 5创建对象
创建一个名为 p1 的对象,并打印 x 的值:
p1 = MyClass()
print(p1.x)__init__() 函数
上面的例子是最简单形式的类和对象,在实际应用程序中并不真正有用。要理解类的含义,我们必须先了解内置的 __init__() 函数。所有类都有一个名为 __init__() 的函数,它始终在启动类时执行。使用 __init__() 函数将值赋给对象属性,或者在创建对象时需要执行的其他操作:
创建名为 Person 的类,使用 __init__() 函数为 name 和 age 赋值:
class Person:
def __init__(self, name, age):
self.name = name
self.age = age
p1 = Person("John", 36)
print(p1.name)
print(p1.age)对象方法
对象也可以包含方法。对象中的方法是属于该对象的函数。让我们在 Person 类中创建方法:
插入一个打印问候语的函数,并在 p1 对象上执行它:
class Person:
def __init__(self, name, age):
self.name = name
self.age = age
def myfunc(self):
print("Hello my name is " + self.name)
p1 = Person("John", 36)
p1.myfunc()self 参数
self 参数是对类的当前实例的引用,用于访问属于该类的变量。它不必被命名为 self,您可以随意调用它,但它必须是类中任意函数的首个参数。(这里建议就使用self)
Opencv图像库
OpenCV(Open Source Computer Vision)是一个开源的计算机视觉库,它提供了丰富的图像处理和计算机视觉算法。OpenCV最初是由Intel开发,并于2000年首次发布。现在,OpenCV由一个庞大的社区维护和支持,广泛应用于学术研究、工业应用和个人项目中。
pip安装
pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install opencv-contrib-python -i https://pypi.tuna.tsinghua.edu.cn/simple
一、如何读取图像和视频并调用摄像头
读取图像
import cv2
pic_path="source/AI.png"
img = cv2.imread(pic_path)
cv2.imshow("PIC-Image",img)
cv2.waitKey(0)成功读取了图像。
读取视频
import cv2
frame_Width = 640
frame_Height = 480
cap = cv2.VideoCapture("E:/pycharmlujin/Opencv/Opencv_learning/Resources/test_video.mp4")
while True:
success, img = cap.read()
img = cv2.resize(img, (frame_Width, frame_Height))
cv2.imshow("Result", img)
if cv2.waitKey(1) & 0xFF == ord('q'):
break运行的效果图如下:
调用摄像头
import cv2
frameWidth = 640
frameHeight = 480
cap = cv2.VideoCapture(0)
cap.set(3, frameWidth) #设置宽度
cap.set(4, frameHeight) #设置高度
cap.set(10,150) #设置亮度
while True:
success, img = cap.read()
cv2.imshow("Result", img)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()这次我们来打开我们的网络摄像头,我们看到了李航老师的《统计学习方法》:
二、Opencv的五个基本功能
main文件
import cv2
import numpy as np
img = cv2.imread("source/AI.png")
kernel = np.ones((5,5),np.uint8)
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
imgBlur = cv2.GaussianBlur(imgGray,(7,7),0)
imgCanny = cv2.Canny(img,150,200)
imgDilation = cv2.dilate(imgCanny,kernel,iterations=1)
imgEroded = cv2.erode(imgDilation,kernel,iterations=1)
cv2.imshow("Gray Image",imgGray)
cv2.imshow("Blur Image",imgBlur)
cv2.imshow("Canny Image",imgCanny)
cv2.imshow("Dilation Image",imgDilation)
cv2.imshow("Eroded Image",imgEroded)
cv2.waitKey(0)Grayscale Image
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
将原来的RGB格式的图像转换为灰度空间,像素只有明暗程度,丢失了颜色信息。
Gaussian Blur
imgBlur = cv2.GaussianBlur(imgGray,(7,7),0)
我们添加上高斯模糊,可以明显的发现它与灰度图像的区别,较为模糊。
Canny Edge detection
imgCanny = cv2.Canny(img,150,200)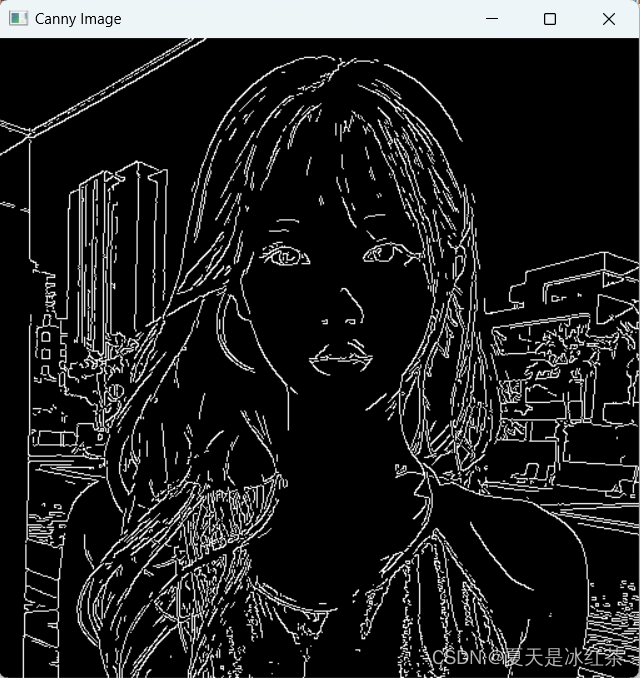
canny检测在边缘检测当中,比起其他的检测效果要好些。
Image Dilation
imgDilation = cv2.dilate(imgCanny,kernel,iterations=1)
这是图像处理的膨胀,在对Canny检测后的图像修改下,它的边缘线条变粗
Eroded Image
imgEroded = cv2.erode(imgDilation,kernel,iterations=1)
又在膨胀后的图片下,进行图像侵蚀。
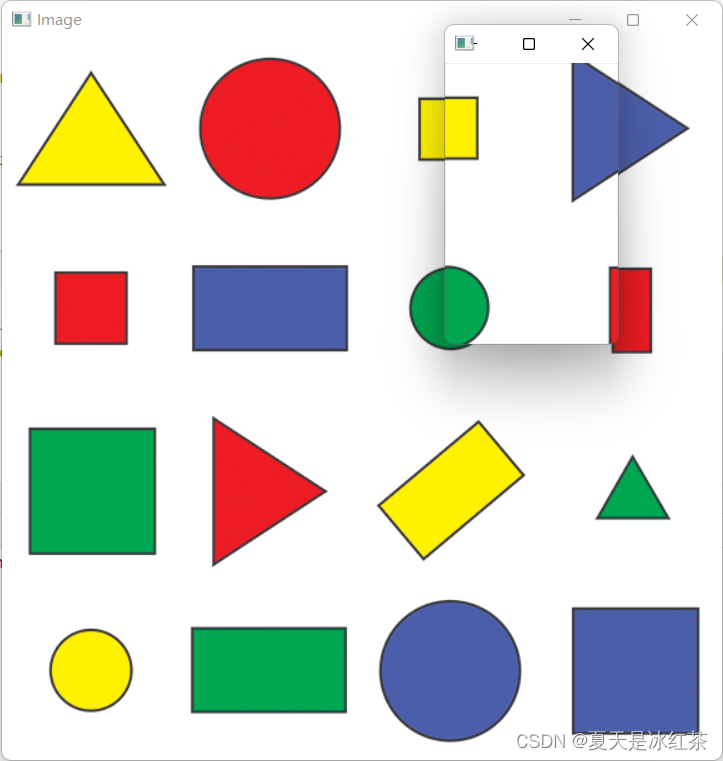
三、如何裁剪和调整图像大小
这是我所用的素材图:

也可以寻找一个合适的图片,只需要更改下,图片的路径即可。
main文件
import cv2
import numpy as np
img = cv2.imread("Resources/shapes.png")
print(img.shape)
imgResize = cv2.resize(img,(1000,500))
print(imgResize.shape)
imgCropped = img[20:245,357:495]
cv2.imshow("Image",img)
# cv2.imshow("Image Resize",imgResize)
cv2.imshow("Image Cropped",imgCropped)
cv2.waitKey(0)运行的效果如下,这里主要是想让大家了解怎么去裁剪图像。
四、如何绘制形状和文本
(1)画线
绘制一条线,我们需要向cv2.line()函数当中,传入线条的始末坐标。在此之前,还需要用numpy创建一个黑色的背景。
import numpy as np
import cv2
img = np.zeros((450,450,3),np.uint8)
cv2.line(img,(0,0),(450,450),(255,0,0),3)
cv2.imshow('imgline',img)
cv2.waitKey(0)(2)画矩形
我们需要向cv2.rectangle()函数中提供左上角和右下角。
cv2.rectangle(img,(126,0),(400,126),(0,255,0),3)(3)画圆圈
绘制一个圆,需要提供其中心坐标和半径。我们将在上面绘制的矩形内绘制一个圆。
cv2.circle(img,(263,63), 63, (0,0,255), -1)(4)画椭圆
绘制椭圆,一个参数是其中心坐标(x,y),另一个参数是长轴,短轴的长度。angle是椭圆沿逆时针旋转的角度。startAngle和endAngle表示从主轴沿逆时针方向测量的椭圆弧的开始和结束
cv2.ellipse(img,(250,250),(120,50),0,0,180,255,-1)(5)画多边形
首先,需要的是顶点的坐标,将这些点组成形状为Rows*1*2的数组,其中Rows是顶点数,并且其类型应为int32。在这里,我们绘制了一个带有四个顶点的黄色小多边形。
pts = np.array([[10,5],[20,30],[70,20],[50,10]], np.int32)
pts = pts.reshape((-1,1,2))
cv2.polylines(img,[pts],True,(0,255,255))如果第三个参数为False,将会得到一条连接所有点的折线,而不是闭合形状。cv2.polylines()可用于绘制多条线。只需创建要绘制的所有线条的列表,然后将其传递给函数即可。所有线条将单独绘制。
(6)向图像添加文本
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(img,'OpenCV',(10,420), font, 3,(255,255,255),2,cv2.LINE_AA)这其中的参数分别是文本,左下角坐标,字体的类型,字体大小,颜色,厚度,线条的类型。
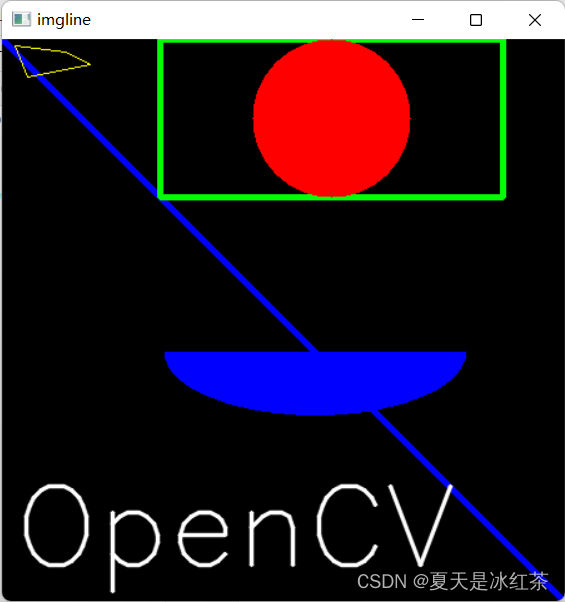
全部代码:
import numpy as np
import cv2
#############创建背景##################
img = np.zeros((450,450,3),np.uint8)
#############对角线条##################
cv2.line(img,(0,0),(450,450),(255,0,0),3)
#############画矩形框##################
cv2.rectangle(img,(126,0),(400,126),(0,255,0),3)
#############画实心圆##################
cv2.circle(img,(263,63), 63, (0,0,255), -1)
#############画椭圆形##################
cv2.ellipse(img,(250,250),(120,50),0,0,180,255,-1)
#############画多边形##################
pts = np.array([[10,5],[20,30],[70,20],[50,10]], np.int32)
pts = pts.reshape((-1,1,2))
cv2.polylines(img,[pts],True,(0,255,255))
#############放置文本##################
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(img,'OpenCV',(10,420), font, 3,(255,255,255),2,cv2.LINE_AA)
cv2.imshow('imgline',img)
cv2.waitKey(0)实际效果图:
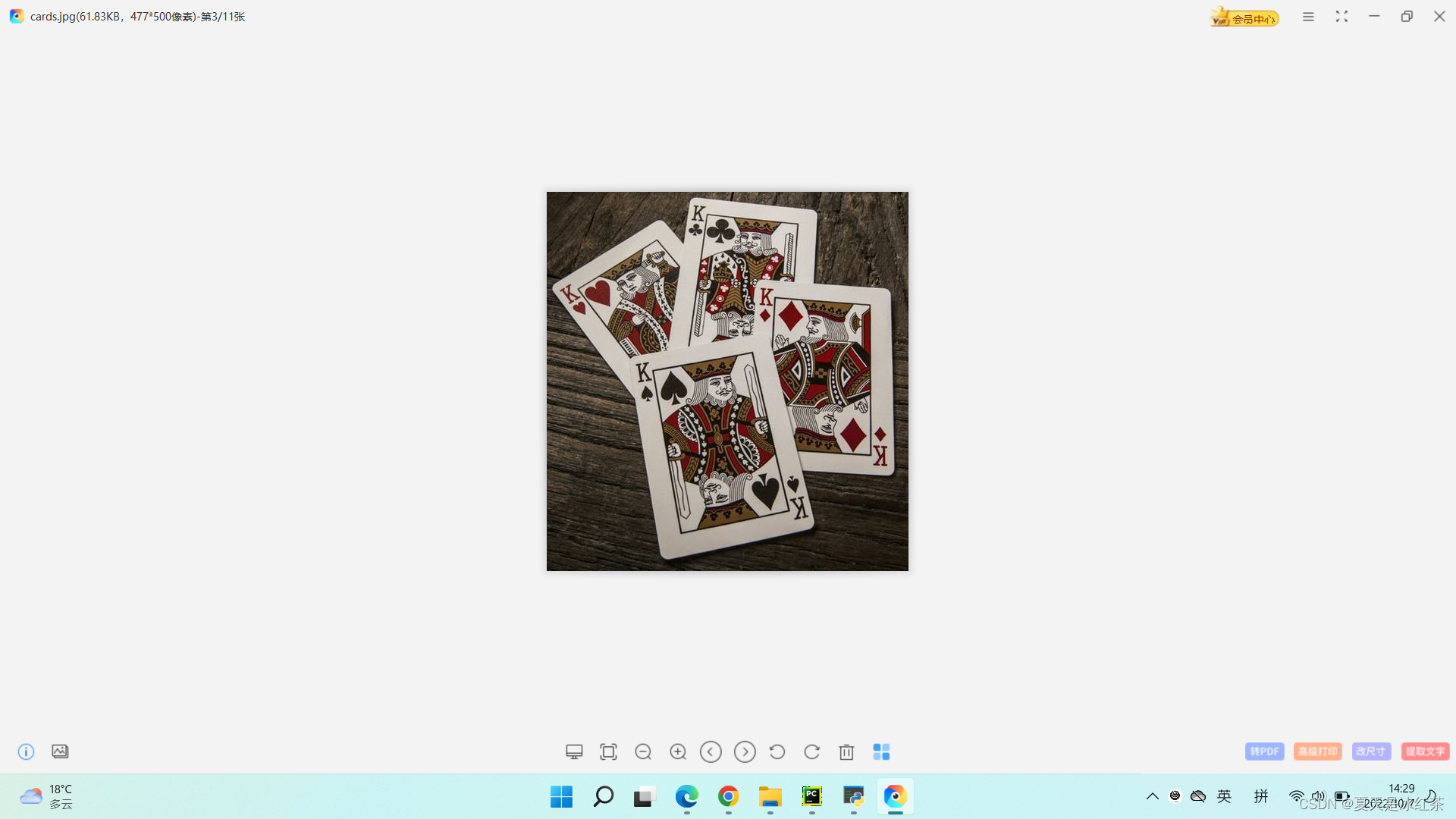
五、透视变换修正
在一堆的扑克牌当中,要如何使其修正呢?请看这里。

此处,我们的目标是要将黑桃K取出,使其修正。它的最后效果是这样的。

效果非常的好,这里需要用到透视变换的知识。
此处要重点介绍一下Opencv的两个函数
- cv2.getPerspectiveTransform(src, dst)从四对对应点计算透视变,src源图像中四边形顶点的坐标,dst目标图像中相应四边形顶点的坐标。
- warpPerspective(src, M, dsize),对图像应用透视变换。
main文件
import cv2
import numpy as np
img = cv2.imread("Resources/cards.jpg")
width,height = 250,350
pts1 = np.float32([[111,219],[287,188],[154,482],[352,440]])
#大概数值可通过PS的标尺得到
pts2 = np.float32([[0,0],[width,0],[0,height],[width,height]])
matrix = cv2.getPerspectiveTransform(pts1,pts2)
#透视变换函数,src:源图像中待测矩形的四点坐标,sdt:目标图像中矩形的四点坐标
imgOutput = cv2.warpPerspective(img,matrix,(width,height))
#参数:输入图像,变换矩阵,目标图像shape
cv2.imshow("Image",img)
cv2.imshow("Output",imgOutput)
cv2.waitKey(0)大家一定比较好奇,我的pts1是怎么来的,现在我来说下,具体的方法
第一种方法
采用QQ截图,打开我们的图片,并且QQ在线。
这样,保持原始大小,不要有任何的放大和缩小。点击Ctrl+Alt+A,在左上角有数值。这是我用windows系统的截图。

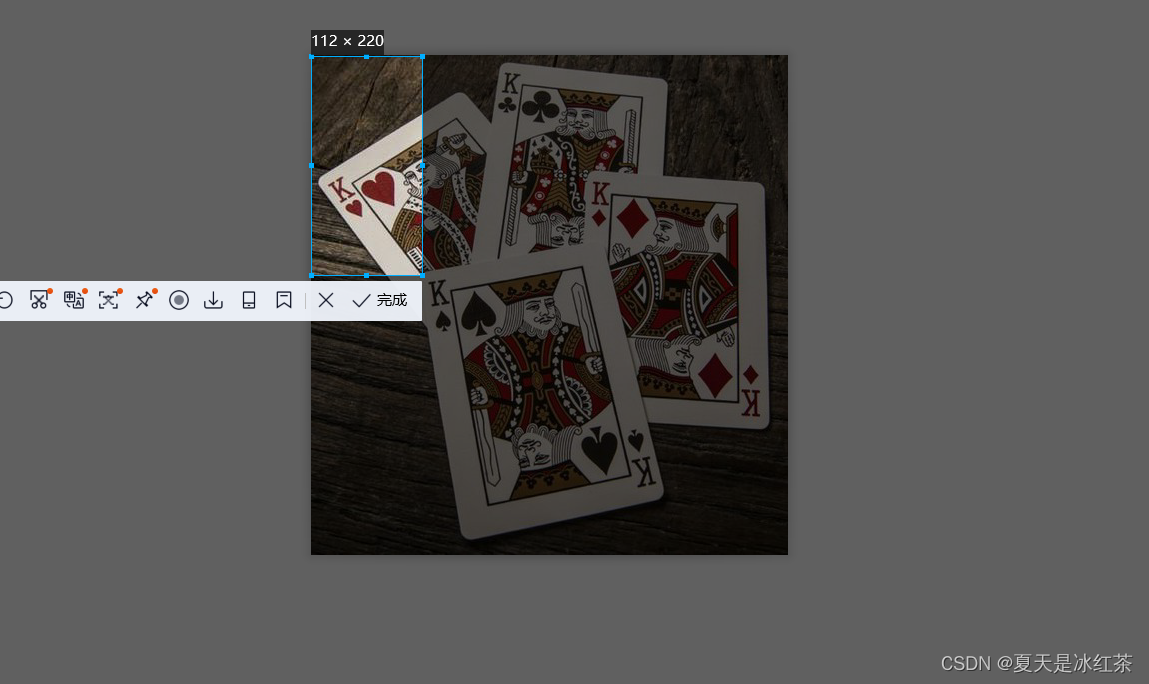
请看,数值上是112*220,填入我们所构成的矩阵。这便是第一个点,按照顺序就可创建这个矩阵。
第二种方法
我们使用PS,直接打开图片,不用置入对象。使用标尺,如下的左边和上边。

从相应的标尺的地方可以拉出一条线,如下,只是我们对应好位置后,需要记下相应的数值。


第三种方法
采用轮廓角点提取的方法,此方法在这里不详解,只是提供一个思路。
简单来说就是通过边缘检测算法(推荐使用Canny边缘检测)获得图像的边缘。接下来,使用cv2.findContours()函数找到边缘的轮廓。
对于角点提取,这里使用了cv2.goodFeaturesToTrack()函数。可以调整maxCorners参数来控制检测到的角点数量,minDistance参数用于指定角点的质量,minDistance参数指定两个角点之间的最小距离。
最后,通过cv2.drawContours()函数绘制轮廓,并使用cv2.circle()函数绘制检测到的角点。
六、堆叠多个图像显示
这次我们要实现的效果是让多张图片在一个窗口中显现,使用matplotlib也可以实现,但今天我们自己创一个函数来实现这个功能,有的时候,我们在做实时检测时可以用到它,可以与原图进行对比。
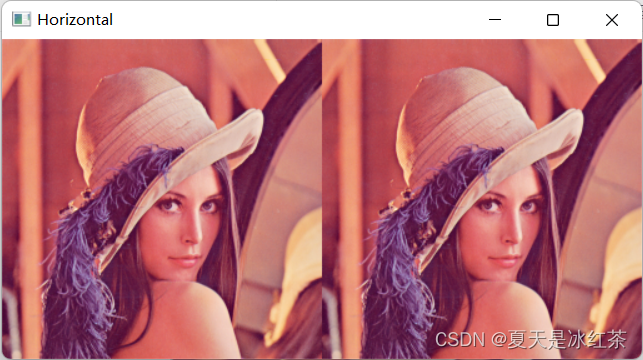
先来开个小菜,比如,如果只是实现水平、垂直的合并,非常简单。我们只需要用到np.hstack和np.vstack来实现。
水平、垂直显示
import cv2
import numpy as np
img = cv2.imread('Resources/lena.png')
img=cv2.resize(img,(0,0),None,0.5,0.5)
imgHor = np.hstack((img,img))
imgVer = np.vstack((img,img))
# 水平,垂直
cv2.imshow("Horizontal",imgHor)
cv2.imshow("Vertical",imgVer)
cv2.waitKey(0)
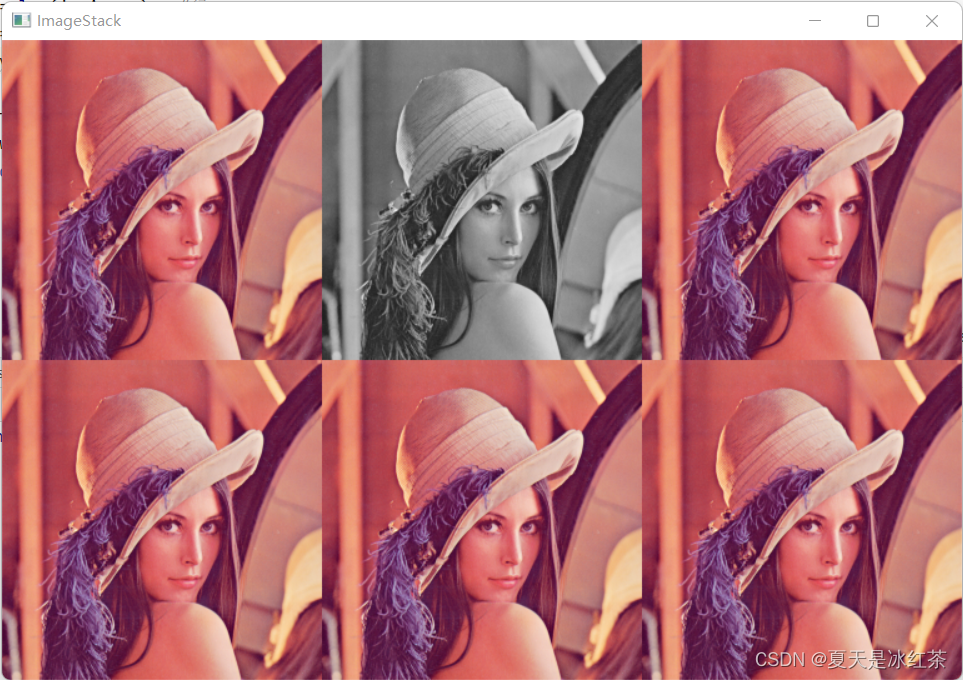
如果只有两个,无可厚非,但我们有时候,要面对四个、六个、八个就捉襟见肘了。我们需要封装一个函数,让他通过传入图像构成的列表,使其能够显示我们的窗口。
import cv2
import numpy as np
def stackImages(scale,imgArray):
rows = len(imgArray) #行
cols = len(imgArray[0]) #列
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
#输出图像的大小,输出图像为:None,fx:width方向的缩放比例,fy:height方向的缩放比例(scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2:
imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2:
imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
img = cv2.imread('Resources/lena.png')
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
imgStack = stackImages(0.5,([img,imgGray,img],[img,img,img]))
# imgHor = np.hstack((img,img))
# imgVer = np.vstack((img,img))
#水平,垂直
# cv2.imshow("Horizontal",imgHor)
# cv2.imshow("Vertical",imgVer)
cv2.imshow("ImageStack",imgStack)
cv2.waitKey(0)在这里我们创建了一个stackImages(scale,imgArray),他用来接收图像的规模大小,以及传入需要合并图像的列表。其中的内容我觉得还是很清晰的,如果你不能明白这里也没有关系,因为你可以将它作为一个函数调用。
七、颜色检测和对象提取
颜色检测
首先,我们需要实现一个颜色检测的脚本,它的效果如下:

在这个窗口所显示的是实时摄像、白板、显示蒙版,放在一起只是为了对比,可以看到根据我们对上面轨迹栏的调整,获得了6个值,让第三个窗口显示出蓝屏。
蒙版
蒙版(Mask)在图像处理中是一种表示图像区域的二维数组,其中的元素可以是0或1,通常用于指定感兴趣的区域或特定操作的区域。蒙版可以看作是对图像进行区域选择或遮罩的一种机制。0表示背景或无效区域,1表示前景或有效区域
脚本
import cv2
import numpy as np
frameWidth = 320
frameHeight = 240
cap = cv2.VideoCapture(0)
cap.set(3, frameWidth)
cap.set(4, frameHeight)
cap.set(10,150)
def empty(a):
pass
cv2.namedWindow("HSV")
cv2.resizeWindow("HSV",640,250)
cv2.createTrackbar("HUE Min","HSV",0,179,empty)
cv2.createTrackbar("SAT Min","HSV",0,255,empty)
cv2.createTrackbar("VALUE Min","HSV",0,255,empty)
cv2.createTrackbar("HUE Max","HSV",179,179,empty)
cv2.createTrackbar("SAT Max","HSV",255,255,empty)
cv2.createTrackbar("VALUE Max","HSV",255,255,empty)
while True:
ret, img = cap.read()
if ret == False:
break
imgHsv = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
h_min = cv2.getTrackbarPos("HUE Min","HSV")
h_max = cv2.getTrackbarPos("HUE Max", "HSV")
s_min = cv2.getTrackbarPos("SAT Min", "HSV")
s_max = cv2.getTrackbarPos("SAT Max", "HSV")
v_min = cv2.getTrackbarPos("VALUE Min", "HSV")
v_max = cv2.getTrackbarPos("VALUE Max", "HSV")
print(h_min)
lower = np.array([h_min,s_min,v_min])
upper = np.array([h_max,s_max,v_max])
mask = cv2.inRange(imgHsv,lower,upper)
result = cv2.bitwise_and(img,img, mask = mask)
mask = cv2.cvtColor(mask, cv2.COLOR_GRAY2BGR)
hStack = np.hstack([img,mask,result])
#cv2.imshow('Original', img)
#cv2.imshow('HSV Color Space', imgHsv)
#cv2.imshow('Mask', mask)
#cv2.imshow('Result', result)
cv2.imshow('Horizontal Stacking', hStack)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
在这里cv2.inRange()函数来检查数组元素是否位于其他两个数组的元素之间,cv2.bitwise_and是位运算,将相同的位置进行与的叠加,就是我们所说的蒙版。
物体提取
那么,我们现在将会通过上面的颜色检测,将我们的目标检测出来。
import cv2
import numpy as np
def empty(a):
pass
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
path = 'Resources/lambo.png'
cv2.namedWindow("TrackBars") #创建轨迹栏
cv2.resizeWindow("TrackBars",640,240) #窗口大小调整
cv2.createTrackbar("Hue Min","TrackBars",0,179,empty)
#参数:名字,定义已经命名的窗口作为轨迹栏,初始的min,max,定义的函数,在此用了个空函数
cv2.createTrackbar("Hue Max","TrackBars",19,179,empty)
cv2.createTrackbar("Sat Min","TrackBars",110,255,empty)
cv2.createTrackbar("Sat Max","TrackBars",240,255,empty)
cv2.createTrackbar("Val Min","TrackBars",153,255,empty)
cv2.createTrackbar("Val Max","TrackBars",255,255,empty)
#经过测试得到的掩码0 19 110 240 153 255
while True:
img = cv2.imread(path)
#图像转化为HSV格式,H:色调S:饱和度V:明度
imgHSV = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
#获取轨迹栏位
h_min = cv2.getTrackbarPos("Hue Min","TrackBars")
h_max = cv2.getTrackbarPos("Hue Max", "TrackBars")
s_min = cv2.getTrackbarPos("Sat Min", "TrackBars")
s_max = cv2.getTrackbarPos("Sat Max", "TrackBars")
v_min = cv2.getTrackbarPos("Val Min", "TrackBars")
v_max = cv2.getTrackbarPos("Val Max", "TrackBars")
print(h_min,h_max,s_min,s_max,v_min,v_max)
#创建一个蒙版,提取需要的颜色为白色,不需要的颜色为白色
lower = np.array([h_min,s_min,v_min])
upper = np.array([h_max,s_max,v_max])
mask = cv2.inRange(imgHSV,lower,upper)
imgResult = cv2.bitwise_and(img,img,mask=mask)
#使用的图像,新图,应用蒙版,and操作,颜色叠加得到橙色
# cv2.imshow("Original",img)
# cv2.imshow("HSV",imgHSV)
# cv2.imshow("Mask", mask)
# cv2.imshow("Result", imgResult)
imgStack = stackImages(0.6,([img,imgHSV],[mask,imgResult]))
#定义比例尺
cv2.imshow("Stacked Images", imgStack)
cv2.waitKey(1)还记得上一节吗?我们也是用到了这个stackImages,我们将用它来展示我们的效果。
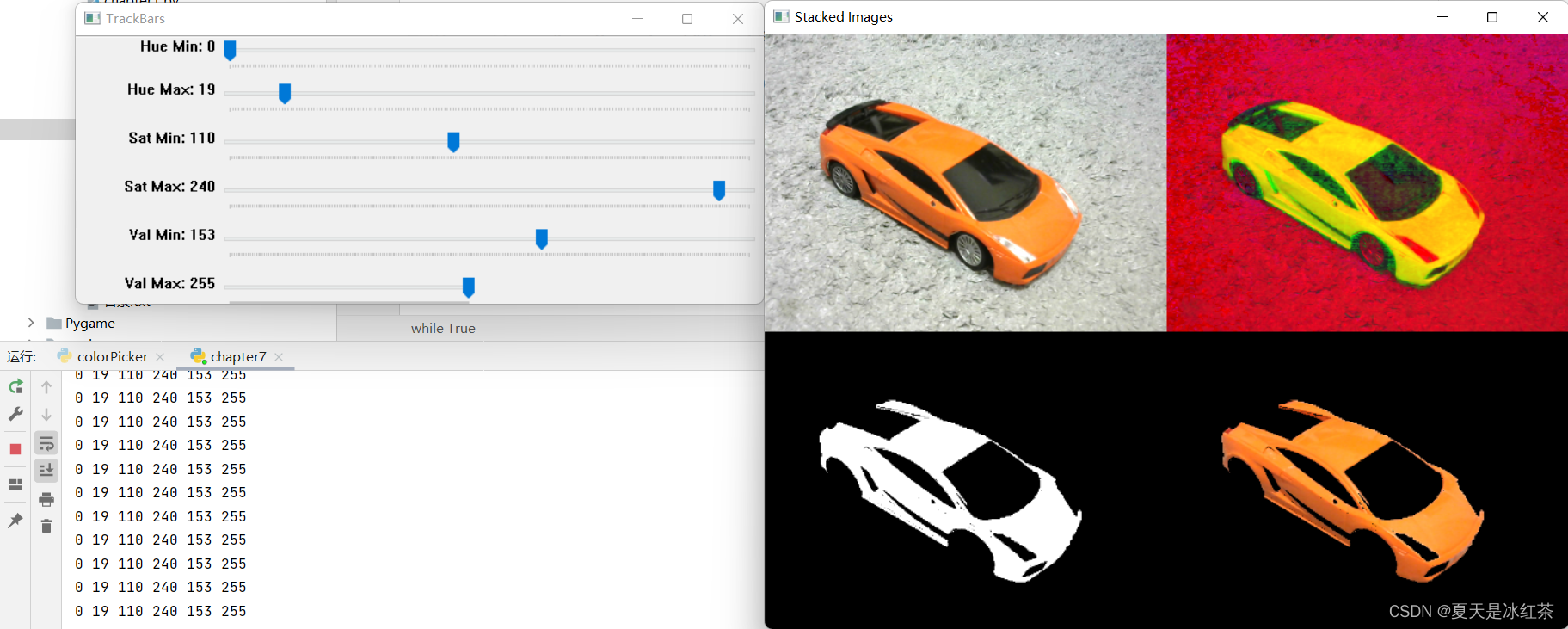
先经过上面的颜色检测后,我们就可以完成对某个图像的提取。
在这里面,蒙版起到了很重要的作用,如果大家学过PS、PR的话,对于这个是什么意思,理解起来并不难。
八、轮廓和形状检测
效果展示

在这里,我们对于原图像中的轮廓和形状进行了检测。分别含有三角形、圆形、正方形、矩形等。且根据图像的大小添加了矩形框。
main文件
import cv2
import numpy as np
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
#获取轮廓函数
def getContours(img):
contours,hierarchy = cv2.findContours(img,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_NONE)
#contours轮廓,hierarchy次等级,cv2.findContours查找轮廓函数,第二个参数为检索方法,cv2.RETR_EXTERNAL检索极端的外部轮廓
for cnt in contours:
area = cv2.contourArea(cnt) #轮廓区域
print(area)
if area>500:
cv2.drawContours(imgContour, cnt, -1, (255, 0, 0), 3) #绘制轮廓函数
#参数:原始图像,轮廓,轮廓索引=-1,即绘制所有的轮廓
peri = cv2.arcLength(cnt,True)
#曲线长度,找到轮廓的弧长
#print(peri)
#逼近角点
approx = cv2.approxPolyDP(cnt,0.02*peri,True)
# 它是原始轮廓周长的百分比,用于控制逼近的程度。较小的值会产生更接近原始轮廓形状的多边形,而较大的值会产生更简化的多边形。
print(len(approx))
#多变型拟合后点的个数
objCor = len(approx)
#边界框边界矩形
x, y, w, h = cv2.boundingRect(approx)
if objCor ==3: objectType ="Tri"
elif objCor == 4:
aspRatio = w/float(h)
#纵横比判断正方形还是长方形
if aspRatio >0.98 and aspRatio <1.03:
objectType= "Square"
else:
objectType="Rectangle"
elif objCor>4: objectType= "Circles"
else:objectType="None"
#绘制外框
cv2.rectangle(imgContour,(x,y),(x+w,y+h),(0,255,0),2)
cv2.putText(imgContour,objectType,
(x+(w//2)-10,y+(h//2)-10),cv2.FONT_HERSHEY_COMPLEX,0.7,
(0,0,0),2)
#0.7—大小,2—厚度
path = 'Resources/shapes.png'
img = cv2.imread(path)
imgContour = img.copy() #原始图像副本
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
imgBlur = cv2.GaussianBlur(imgGray,(7,7),1)
#参数,灰度图像,内核,sigma=1,越高越模糊
imgCanny = cv2.Canny(imgBlur,50,50)
#边缘检测
getContours(imgCanny)
imgBlank = np.zeros_like(img) #黑色图像
imgStack = stackImages(0.6,([img,imgGray,imgBlur],
[imgCanny,imgContour,imgBlank]))
cv2.imshow("Stack", imgStack)
cv2.waitKey(0)
就像我之前所说的,我们只需要调用stackImages,接下来需要写一个getContours()的函数,以便于我们寻找它的轮廓,然后根据我们的一拟合点,判断它们的形状是三角形、正方形等,其中的一些函数可能第一次接触,我就尽可能的将注释添上。在这之后,我们就可以根据原图像的一系列转换——灰度转换、高斯模糊、Canny检测。
九、人脸识别与车牌检测(了解)
人脸识别
我们先来看看它的效果:

成功检测到人脸,如果你看过我前面的项目,你会非常容易地将它修改成实时地检测人脸。这里我们用到了"haarcascade_frontalface_default.xml",这是一个入门的教程,暂时不用了解它是怎么来的,它就是一个默认的人脸检测器。
import cv2
faceCascade= cv2.CascadeClassifier("source/haarcascade_frontalface_default.xml")
img = cv2.imread('Resources/lena.png')
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
faces = faceCascade.detectMultiScale(imgGray,1.1,4)
for (x,y,w,h) in faces:
cv2.rectangle(img,(x,y),(x+w,y+h),(255,125,255),2)
cv2.imshow("Result", img)
cv2.waitKey(0)CascadeClassifier,是Opencv中做人脸检测的时候的一个级联分类器,detectMultiScale用来检测到的对象将作为列表返回个矩形,再简单画框就完成了。
车牌检测

import cv2
#############################################
frameWidth = 640
frameHeight = 480
nPlateCascade = cv2.CascadeClassifier("source/haarcascade_russian_plate_number.xml")
minArea = 200
color = (255,0,255)
###############################################
cap = cv2.VideoCapture(0)
cap.set(3, frameWidth)
cap.set(4, frameHeight)
cap.set(10,150)
count = 0
while True:
success, img = cap.read()
imgGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
numberPlates = nPlateCascade.detectMultiScale(imgGray, 1.1, 10)
for (x, y, w, h) in numberPlates:
area = w*h
if area >minArea:
cv2.rectangle(img, (x, y), (x + w, y + h), (255, 0, 255), 2)
cv2.putText(img,"Number Plate",(x,y-5),
cv2.FONT_HERSHEY_COMPLEX_SMALL,1,color,2)
imgRoi = img[y:y+h,x:x+w]
cv2.imshow("ROI", imgRoi)
cv2.imshow("Result", img)
if cv2.waitKey(20) & 0xFF == ord('q'):
break
if cv2.waitKey(1) & 0xFF == ord('s'):
cv2.imwrite("Resources/Scanned/NoPlate_"+str(count)+".jpg",imgRoi)
cv2.rectangle(img,(0,200),(640,300),(0,255,0),cv2.FILLED)
cv2.putText(img,"Scan Saved",(150,265),cv2.FONT_HERSHEY_DUPLEX,
2,(0,0,255),2)
cv2.imshow("Result",img)
cv2.waitKey(500)
count += 1
车牌检测与上面的人脸识别相同。当然在后面添加了保存的功能。
总结
通过本教程,应该对Python编程和Opencv的基础知识有了一定的了解。这些基础知识将为您后续的学习和开发提供坚实的基础。在学习过程中,不仅要掌握语法规则,还要注重实践和不断的练习,这样才能更好地运用Python来解决问题和开发应用。
本次的教程就结束了,今后的学习中,如果遇到不会的问题,可以再去查找,在遇到问题时学会新的知识。
优质资源
Opencv官方文档中文:
OpenCV中文官方文档
Python自学网站:
Python 教程 (w3schools.cn)
Python3 教程 | 菜鸟教程 (runoob.com)
Python简介 - 廖雪峰的官方网站 (liaoxuefeng.com)
GitHub:
Opencv-project-training/Opencv_beginner/RADEME.md at main · Auorui/Opencv-project-training · GitHub