文章目录
- 一、定时器的应用
- 二、定时器的触发方式
- 2.1 网络事件和定时事件在一个线程中处理
- 2.2
- 二、定时器的设计
- 2.1 接口设计
- 2.2 数据结构设计
- 2.2.1 红黑树
- 2.2.3 最小堆
- 2.2.4 时间轮
- 三、利用红黑树实现定时器
- 3.1 数据结构
- 3.2 接口实现
- 3.2.1 初始化定时器
- 3.2.2 添加定时器
- 3.2.3 删除定时器
- 3.2.4 更新定时器
- 3.2.5 返回最近定时任务的触发时间
- 3.3 定时器的驱动
- 3.4 代码实现
- 四、利用timefd实现定时器
- 4.1 流程
- 4.2 代码实现
- 五、利用多级时间轮实现定时器
- 5.1 数据结构
- 5.2 接口设计
- 5.2.1 初始化定时器
- 5.2.2 添加定时器
- 5.2.3 删除定时器
- 5.2.4 更新定时器
- 5.2.5 到期任务的处理
- 5.2.6 刷新时间片,重新映射
- 5.3 定时器的驱动
- 5.4 代码实现
- 5.5 总结
一、定时器的应用
定时器就像闹钟,可以设定一个时间,然后进入倒计时,到点了提醒我们。同样,应用开发也需要一个定时器,通过设定时间,到点了唤醒程序去执行某项任务。
常见的应用场景有:
1)心跳检测
2)游戏技能冷却
3)倒计时
4) 其他需要延时处理的功能
定时器由两部分组成:容器 + 检测触发机制
1)容器:负责组织大量定时任务
2)检测触发机制:负责检测最近要触发的定时任务
二、定时器的触发方式
对服务端来说,驱动服务端业务逻辑的事件,包括:网络事件、定时事件、以及信号事件。
通常,网络事件和定时事件会进行协同处理。
定时器触发形式通常有两种:
1)利用I/O多路复用系统调用的最后一个参数(超时时间),来触发检测定时器。
2)利用timefd,将定时检测作为I/O多路复用当中的事件进行处理。
2.1 网络事件和定时事件在一个线程中处理
网络事件和定时事件可以进行协同处理,即网络事件和定时事件在一个线程中处理。以epoll多路复用器为例子,通过epoll_wait()的第四个参数timeout作为延时触发定时器,业务逻辑的执行也在同一个线程中。
// 网络事件和定时事件在一个线程中处理,协同处理
while (!quit) {
// 最近定时任务的触发时间 = 最近要被触任务的触发时间 - 当前时间
int timeout = get_nearest_timer() - now();
if (timeout < 0) timeout = -1; // 定时任务都过期
// 最近定时任务的触发时间作为 timeout 参数,timetout 定时任务触发
// 1、若没有网络事件,先去处理定时任务
// 2、若收到网络事件,先处理网络事件,再处理定时任务
int nevent = epoll_wait(epfd, ev, nev, timeout);
for (int i = 0; i < nevent; i++) {
// ... 处理网络事件
}
// 轮询处理定时事件
update_timer();
}
1)为什么网络事件和定时事件可以协同处理?
因为reactor是基于事件的网络IO模型,IO的处理是同步的,事件的处理是异步的,而定时任务的处理也是异步的,所以事件的处理和定时任务的处理可以在一个线程中一起处理。
2)如何进行协同处理?
以 io 多路复用作为定时器驱动,“阻塞”地收集就绪事件,timeout 参数用于设置定时。
3)使用场景
- redis(单reactor)
- memcached、nginx(多reactor)
4)容器的数据结构
数据结构通常选择红黑树、跳表、最小堆等来实现定时器。
2.2
定时任务在通过一个单独的线程检测,以 sleep(time)作为定时器驱动,time 参数用于设置定时。
定时器事件的处理由其他线程或运行队列执行。
这种触发方式通常用于处理大量定时任务。
// 网络事件和定时事件在不同线程中处理
void * thread_timer(void *thread_param) {
init_timer(); //初始化定时器
while (!quit) {
update_timer(); //更新定时器状态
sleep(t); //线程休眠时间t
}
clear_timer();
return NULL;
}
pthread_create(&pid, NULL, thread_timer, &thread_param);
该代码创建了一个单独的线程来处理定时事件。在循环中,定时器状态会被更新,并根据需要触发相应的事件。通过调用 sleep 函数,线程可以暂停一段时间,等待下一个定时事件的到来。最后,在线程结束时,定时器资源将被清理和释放。
1)数据结构
使用时间轮数据结构,在一个线程中利用sleep(time)负责检测(time要小于最小时间精度)。时间到达时,通过信号或插入运行队列让其他线程运行业务逻辑。
时间轮只负责检测。这种方式加锁粒度小。
二、定时器的设计
2.1 接口设计
基础接口有
1)初始化定时器
2)添加定时器 —— 添加定时任务
3)删除定时器 —— 删除定时任务
4)更新定时器 —— 到期任务的处理
另外,在协同处理的方案中,即网络事件和定时事件在一个线程中处理的触发方式。此时还需要额外添加接口,来查找最近定时任务的触发时间。
5)查找最近定时任务的触发时间
// 初始化定时器
void init_timer();
// 定时器的添加
Node* add_timer(int expire, callback cb);
// 定时器的删除
bool del_timer(Node* node);
// 定时器的更新
void update_timer();
// 返回最近定时任务的触发时间,用于协同处理
Node* find_nearest_timer();
2.2 数据结构设计
对定时任务的组织本质是要对定时任务优先级的处理。所谓优先级,就是先触发的定时任务放在最前面。由此产生两类数据结构;
1)按触发时间进行顺序组织,要求数据结构有序,或者相对有序。并且,能快速查找最近触发的定时任务,以及需要考虑怎么处理相同时间触发的定时任务。
- 红黑树(绝对有序): nginx
- 跳表(绝对有序):redis(将来引入)
- 最小堆(相对有序): libevent, libev, go
2)按照执行顺序组织:时间轮
2.2.1 红黑树
红黑树的中序遍历是绝对有序的

2.2.3 最小堆
了解最小堆之前,需要先介绍满二叉树和完全二叉树
1)满二叉树:所有的层节点数都是该层所能容纳节点的最大数量,即满足
2
n
2^n
2n
2)完全二叉树:若二叉树的深度为h,去掉了h层的节点,就是一个满二叉树;并且h层都集中在最左侧排序。
3)最小堆:
是一颗完全二叉树;
某一个节点的值总是小于等于它的子节点的值;
堆中任意一个节点的子树都是最小堆;
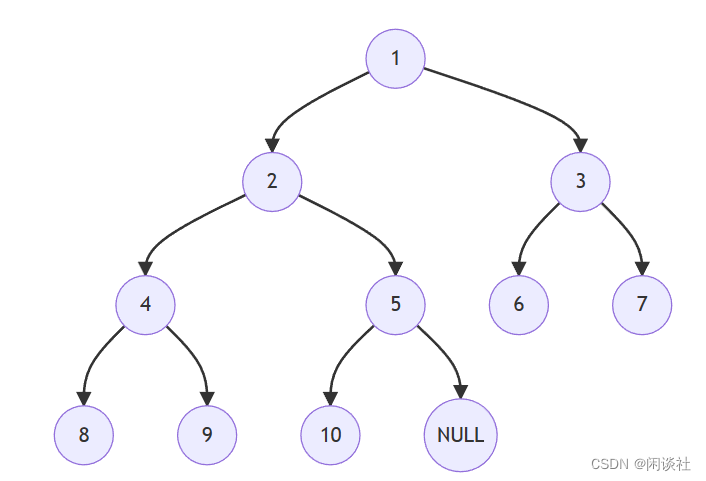
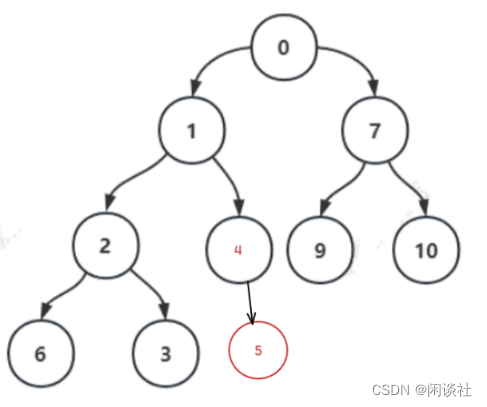
4)最小堆添加节点
为了满足完全二叉树的定义,往二叉树最高层沿着最左侧添加一个节点;然后考虑是否能上升操作;
如果此时添加值为 4 的节点,4 节点是 5 节点的左子树;4 比 5 小,4 和 5 需要交换值;
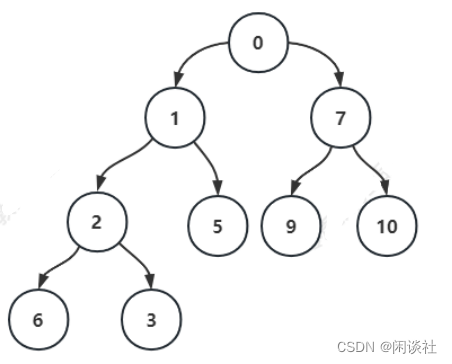
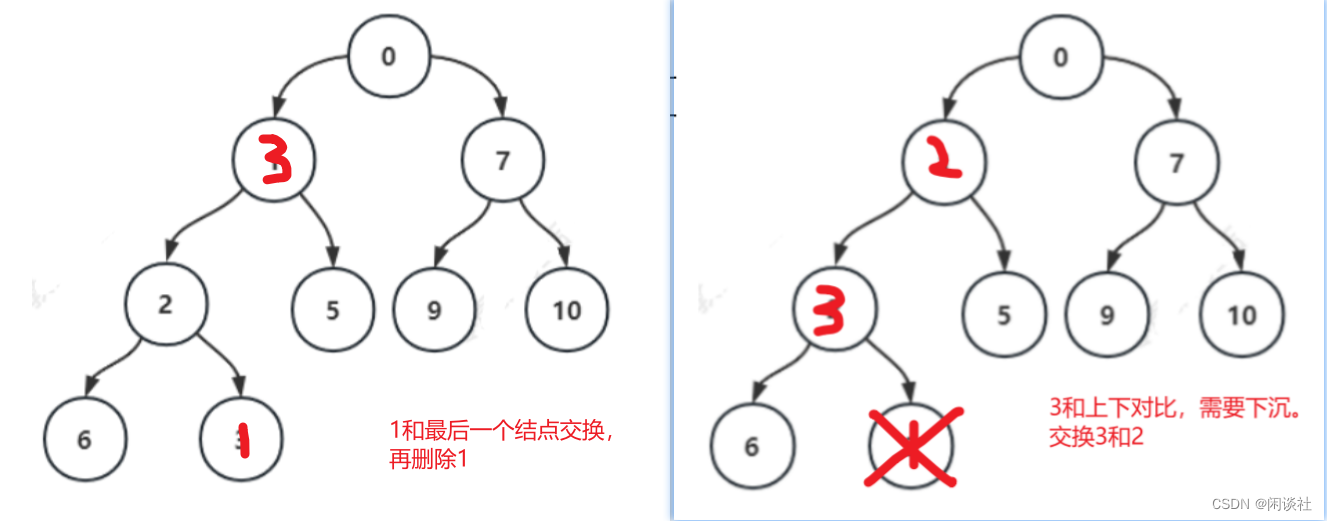
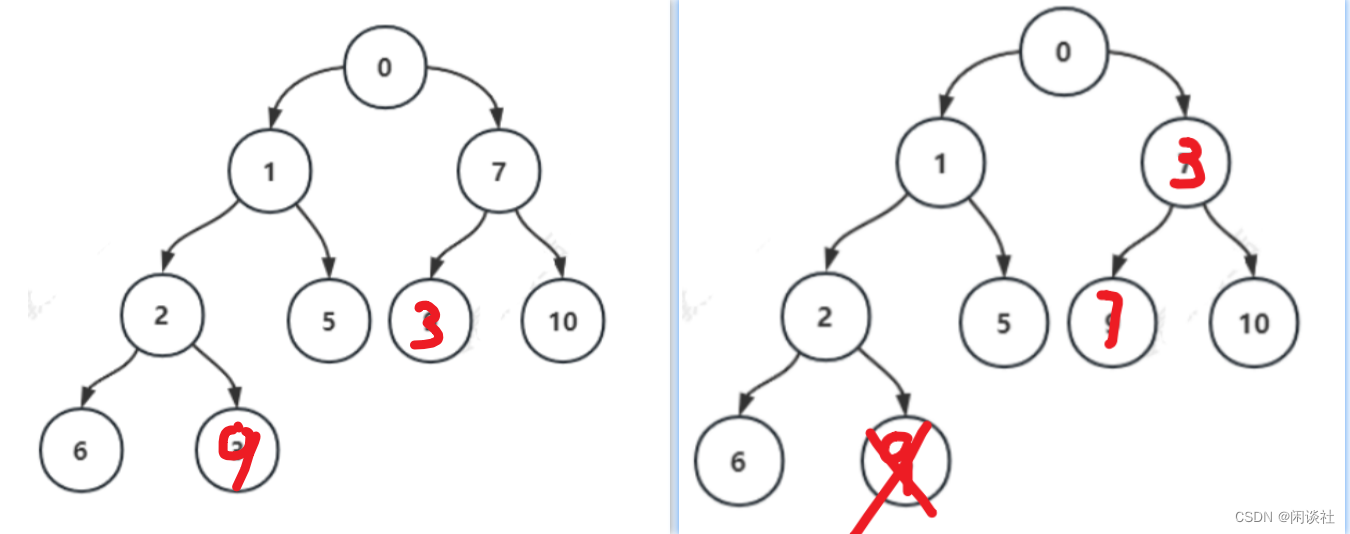
5)最小堆删除节点
删除操作需要先查找是否包含这个节点;确定存在后,交换最后一个节点,先考虑能否执行下降操作,否则执行上升操作;最后删除最后一个节点;
例如:删除 1 号节点,则需要下沉操作;
删除 9 号节点,则需要上升操作;
2.2.4 时间轮

时间轮是根据时钟运行规律而来的。时间精度为1s,时间范围为12h。定义三个数组分别存 秒、分、时;一个指针一秒钟移动一次,只需关注最近一分钟内要触发的定时任务。

1)添加任务
根据定时任务的间隔时间time,判断将其放在哪一层。
比如当前时间tick是65s,即秒针指向5,分针指向1。
现在要添加间隔时间112s的定时任务。那么根据((65+112)/60)%60 = 2,得到该任务添加在分针层级2的任务队列里。
2)重新映射
我们给出的时间轮的时间精度是秒,也就是只执行秒层的任务。所以秒针每转一圈,需要把下一分钟的任务重新映射到秒层。比如原来分针指向1,秒针转了一圈,下一轮需要把分针2里的任务,重新映射到秒层。
比如,原来添加的任务,过了55s后,当前时间120s。(65+112-120)%60 = 57,也就是刚才添加的任务映射在秒层57的位置。
3)删除节点
时间轮删除节点不方便,一般节点不能删除,因为tick一直在移动,会出现重新映射,节点位置可能改变。
那么可以添加一个标记字段cancel,当任务触发时检查这个字段,如果cancel=true则不执行具体任务。
三、利用红黑树实现定时器
3.1 数据结构
在C++中,set、map、multiset、multimap容器使用的是红黑树管理数据。这里选择 set来存储定时器任务。
使用set设计定时器,需要考虑一个关键问题:相同触发事件的定时任务如何处理?
举个例子,任务A到来时的时间 tick = 10,间隔 10s 后触发执行,其触发时间 expire = 20s ;任务B到来时的时间 tick = 15s,间隔 5s 后触发执行,其触发时间也是 expire = 20s。那到点了,应该先执行哪个任务呢?
我们根据插入顺序来决定执行顺序,先插入的先执行,放在红黑树的zuoce。后插入的后执行,放在红黑树的youce。通过 id 属性描述任务到来的先后顺序。
因此定时器结点的结构为
// 定义定时结点的基类,存储唯一标识的元素
struct TimerNodeBase {
time_t expire; // 任务触发时间
int64_t id; // 用来描述插入先后顺序
};
// 定时结点,包含定时任务等
struct TimerNode : public TimerNodeBase {
// 定时器任务回调函数
// C++ 11特性,使用函数对象。降低拷贝消耗,提高效率
// 使用 using 关键字定义了一个 Callback 类型的别名,
// 别名指向一个接受 const TimerNode &node 参数、返回值为 void 的函数对象。
using Callback = std::function<void(const TimerNode &node)>;
Callback func;
// 构造函数,容器内部只构造一次
TimerNode(int64_t id, time_t expire, Callback func) : func(func) {
this->expire = expire;
this->id = id;
}
};
在代码中,我们把函数对象剥离出来。这是因为红黑树在改变的时候,为了保持平衡,需要频繁的对比。而对比就涉及到复制、移动等操作。注意到,对比我们只需要对比触发时间和id,不需要函数对象。
函数对象作为类,占用大量的空间,复制和移动代价高,因此,我们拆分成基类和派生类,基类存储标识,用于复制和移动;子类存储函数对象等,在容器内构造后,不再复制和移动。
因此,实现比较函数,采用基类引用比较。
// 按触发时间的先后顺序对结点进行排序
bool operator < (const TimerNodeBase &lhd, const TimerNodeBase &rhd) {
// 先比较触发时间
if (lhd.expire < rhd.expire)
return true;
else if (lhd.expire > rhd.expire)
return false;
// 触发时间相同,比较插入的先后顺序
// 比较id大小,先插入的结点id小,先执行
return lhd.id < rhd.id;
}
3.2 接口实现
3.2.1 初始化定时器
获取当前时间
static time_t GetTick() {
auto sc = chrono::time_point_cast<chrono::milliseconds>(chrono::steady_clock::now());
auto temp = chrono::duration_cast<chrono::milliseconds>(sc.time_since_epoch());
return temp.count();
}
1)chrono::steady_clock::now():获取系统启动到当前的稳定时间。
2)chrono::time_point_cast<chrono::milliseconds>(chrono::steady_clock::now()):将当前的稳定时钟时间点转换为毫秒精度的时间点(time_point)。
3)sc.time_since_epoch():计算时间间隔(duration)。
4)chrono::duration_cast<chrono::milliseconds>(sc.time_since_epoch()):将计算得到的时间间隔转换为毫秒精度(milliseconds)。
5)temp.count():获取转换后的时间间隔的值,即毫秒数。
3.2.2 添加定时器
// 参数: msec 任务触发时间间隔,func 任务执行的回调函数
TimerNodeBase AddTimer(time_t msec, TimerNode::Callback func) {
time_t expire = GetTick() + msec;
// 相对于insert,emplace 避免了额外的拷贝或移动操作
auto ele = timermap.emplace(GenID(), expire, func);
return static_cast<TimerNodeBase>(*ele.first);
}
上面代码每次插入,需要根据红黑树的插入,重新调整set容器。其实红黑树是有序的,如果是插入一个大于红黑树最右边结点的元素,直接在这个结点,也就是容器末尾插入即可,时间复杂度O(1)。
TimerNodeBase AddTimer(time_t msec, TimerNode::Callback func) {
time_t expire = GetTick() + msec;
// 如果timermap为空,或者触发时间<=timermap的最后一个(最大的)结点的时间,正常插入
if (timermap.empty() || expire <= timermap.crbegin()->expire){
auto pairs = timermap.emplace(GenID(), expire, std::move(func));
return static_cast<TimerNodeBase>(*pairs.first);
}
// 否则直接插入最后,emplace_hint插入时间复杂度是O(1)
auto ele = timermap.emplace_hint(timermap.crbegin().base(), GenID(), expire, std::move(func));
return static_cast<TimerNodeBase>(*ele);
}
3.2.3 删除定时器
bool DelTimer(TimerNodeBase &node) {
// 代替子类结点,避免函数对象复制控制和移动
auto iter = timermap.find(node);
// 若存在,则删除该结点
if (iter != timermap.end()) {
timermap.erase(iter);
return true;
}
return false;
}
3.2.4 更新定时器
bool CheckTimer() {
auto iter = timermap.begin();
if (iter != timermap.end() && iter->expire <= GetTick()) {
// 定时任务被触发,则执行对应的定时任务
iter->func(*iter);
// 删除执行完毕的定时任务
timermap.erase(iter);
return true;
}
return false;
}
3.2.5 返回最近定时任务的触发时间
time_t TimeToSleep() {
auto iter = timermap.begin();
if (iter == timermap.end()) {
return -1;
}
// 最近任务的触发时间 = 最近任务初始设置的触发时间 - 当前时间
time_t diss = iter->expire - GetTick();
// 最近要触发的任务时间 > 0,继续等待;= 0,立即处理任务 (对应epoll_wait 的 timeout)
return diss > 0 ? diss : 0;
}
3.3 定时器的驱动
定时器驱动的方式,这里选择 epoll 来实现,通过参数 timeout 设置定时。
while (true) {
// 最近任务的触发时间接口:TimeToSlee,作为 timeout 参数
int n = epoll_wait(epfd, ev, 64, timer->TimeToSleep());
for (int i = 0; i < n; i++) {
/* 处理网络事件 */
}
// 处理定时事件
while(timer->CheckTimer());
}
3.4 代码实现
// g++ timer.cc -o timer -std=c++14
#include <sys/epoll.h>
#include <functional>
#include <chrono>
#include <set>
#include <memory>
#include <iostream>
using namespace std;
// 定时结点的基类,存储唯一标识的元素,轻量级,用于比较
struct TimerNodeBase {
time_t expire; // 任务触发时间
int64_t id; // 用来描述插入先后顺序,int64_t,能记录5000多年
};
// 定时结点,包含定时任务等
struct TimerNode : public TimerNodeBase {
// 定时器任务回调函数
// 函数对象拷贝代价高,在容器内拷贝构造后不会再去移动
using Callback = std::function<void(const TimerNode &node)>;
Callback func;
// 构造函数,容器内部就地拷贝构造调用一次,此后不会再去调用
TimerNode(int64_t id, time_t expire, Callback func) : func(func) {
this->expire = expire;
this->id = id;
}
};
// 根据触发时间对结点进行排序
// 基类引用,多态特性,基类代替timerNode结点,避免拷贝构造子类
bool operator < (const TimerNodeBase &lhd, const TimerNodeBase &rhd) {
// 先比较触发时间
if (lhd.expire < rhd.expire)
return true;
else if (lhd.expire > rhd.expire)
return false;
// 触发时间相同,比较插入的先后顺序
// 比较id大小,先插入的结点id小,先执行
return lhd.id < rhd.id;
}
// 定时器类的实现
class Timer {
public:
// 获取当前时间
static time_t GetTick() {
// 获取系统时间戳,系统启动到当前的时间
auto sc = chrono::time_point_cast<chrono::milliseconds>(chrono::steady_clock::now());
// 获取到时间戳的时间段
auto temp = chrono::duration_cast<chrono::milliseconds>(sc.time_since_epoch());
return temp.count();
}
// 2、添加定时任务
// 参数: msec 任务触发时间间隔,func 任务执行的回调函数
TimerNodeBase AddTimer(time_t msec, TimerNode::Callback func) {
time_t expire = GetTick() + msec;
// 如果timermap为空,或者触发时间<=timermap的最后一个(最大的)结点的时间,正常插入
if (timermap.empty() || expire <= timermap.crbegin()->expire){
auto pairs = timermap.emplace(GenID(), expire, std::move(func));
return static_cast<TimerNodeBase>(*pairs.first);
}
// 否则直接插入最后,emplace_hint插入时间复杂度是O(1)
auto ele = timermap.emplace_hint(timermap.crbegin().base(), GenID(), expire, std::move(func));
return static_cast<TimerNodeBase>(*ele);
}
// 3、删除/取消定时任务
bool DelTimer(TimerNodeBase &node) {
// C++14的新特性:只需传递等价 key 比较,无需创建 key 对象比较,
// 代替子类结点,避免函数对象复制控制和移动
auto iter = timermap.find(node);
// 若存在,则删除该结点
if (iter != timermap.end()) {
timermap.erase(iter);
return true;
}
return false;
}
// 4、检测定时任务是否被触发,触发则执行定时任务
bool CheckTimer() {
auto iter = timermap.begin();
if (iter != timermap.end() && iter->expire <= GetTick()) {
// 定时任务被触发,则执行对应的定时任务
iter->func(*iter);
// 删除执行完毕的定时任务
timermap.erase(iter);
return true;
}
return false;
}
// 5、返回最近定时任务触发时间,作为timeout的参数
time_t TimeToSleep() {
auto iter = timermap.begin();
if (iter == timermap.end()) {
return -1;
}
// 最近任务的触发时间 = 最近任务初始设置的触发时间 - 当前时间
time_t diss = iter->expire - GetTick();
// 最近要触发的任务时间 > 0,继续等待;= 0,立即处理任务
return diss > 0 ? diss : 0;
}
private:
// 产生 id 的方法
static int64_t GenID() {
return gid++;
}
static int64_t gid;
// 利用 set 排序快速查找要到期的任务
set<TimerNode, std::less<>> timermap;
};
int64_t Timer::gid = 0;
int main() {
// 定时器驱动
int epfd = epoll_create(1);
// 创建定时器
unique_ptr<Timer> timer = make_unique<Timer>();
int i = 0;
timer->AddTimer(1000, [&](const TimerNode &node) {
cout << Timer::GetTick() << "node id:" << node.id << " revoked times:" << ++i << endl;
});
timer->AddTimer(1000, [&](const TimerNode &node) {
cout << Timer::GetTick() << "node id:" << node.id << " revoked times:" << ++i << endl;
});
timer->AddTimer(3000, [&](const TimerNode &node) {
cout << Timer::GetTick() << "node id:" << node.id << " revoked times:" << ++i << endl;
});
auto node = timer->AddTimer(2100, [&](const TimerNode &node) {
cout << Timer::GetTick() << "node id:" << node.id << " revoked times:" << ++i << endl;
});
timer->DelTimer(node);
cout << "now time:" << Timer::GetTick() << endl;
epoll_event ev[64] = {0};
while (true) {
// 最近任务的触发时间接口:TimeToSlee,作为 timeout 参数
int n = epoll_wait(epfd, ev, 64, timer->TimeToSleep());
for (int i = 0; i < n; i++) {
/*... 处理网络事件 ...*/
}
// 处理定时事件
while(timer->CheckTimer());
}
return 0;
}
四、利用timefd实现定时器
timefd实现方式跟红黑树很相似,主要区别在于驱动方式。
4.1 流程
1)创建一个 timerfd 文件描述符。可以使用 timerfd_create 函数来创建它。
2)设置定时器参数。构建一个 struct itimerspec 结构体,指定定时器的起始时间和间隔时间。
3)使用 timerfd_settime 函数将定时器参数应用到 timerfd 文件描述符上
4)等待定时器事件触发。可以使用 select、poll、epoll 等函数来等待文件描述符上的可读事件。当定时器事件触发,timerfd 文件描述符会变为可读,你可以在相应的事件处理逻辑中进行处理。
5)当不再需要定时器时,关闭 timerfd 文件描述符。使用 close 函数来关闭它。
4.2 代码实现
#include <sys/epoll.h>
#include <sys/timerfd.h>
#include <time.h> // for timespec itimerspec
#include <unistd.h> // for close
#include <functional>
#include <chrono>
#include <set>
#include <memory>
#include <iostream>
using namespace std;
struct TimerNodeBase {
time_t expire;
uint64_t id;
};
struct TimerNode : public TimerNodeBase {
using Callback = std::function<void(const TimerNode &node)>;
Callback func;
TimerNode(int64_t id, time_t expire, Callback func) : func(func) {
this->expire = expire;
this->id = id;
}
};
bool operator < (const TimerNodeBase &lhd, const TimerNodeBase &rhd) {
if (lhd.expire < rhd.expire) {
return true;
} else if (lhd.expire > rhd.expire) {
return false;
} else return lhd.id < rhd.id;
}
class Timer {
public:
static inline time_t GetTick() {
return chrono::duration_cast<chrono::milliseconds>(chrono::steady_clock::now().time_since_epoch()).count();
}
TimerNodeBase AddTimer(int msec, TimerNode::Callback func) {
time_t expire = GetTick() + msec;
if (timeouts.empty() || expire <= timeouts.crbegin()->expire) {
auto pairs = timeouts.emplace(GenID(), expire, std::move(func));
return static_cast<TimerNodeBase>(*pairs.first);
}
auto ele = timeouts.emplace_hint(timeouts.crbegin().base(), GenID(), expire, std::move(func));
return static_cast<TimerNodeBase>(*ele);
}
void DelTimer(TimerNodeBase &node) {
auto iter = timeouts.find(node);
if (iter != timeouts.end())
timeouts.erase(iter);
}
void HandleTimer(time_t now) {
auto iter = timeouts.begin();
while (iter != timeouts.end() && iter->expire <= now) {
iter->func(*iter);
iter = timeouts.erase(iter);
}
}
public:
virtual void UpdateTimerfd(const int fd) {
struct timespec abstime;
// 获取最小触发时间
auto iter = timeouts.begin();
if (iter != timeouts.end()) {
abstime.tv_sec = iter->expire / 1000;
abstime.tv_nsec = (iter->expire % 1000) * 1000000;
} else {
abstime.tv_sec = 0;
abstime.tv_nsec = 0;
}
struct itimerspec its = {
.it_interval = {},
.it_value = abstime
};
// 通过文件描述符 fd 设置定时器的参数
timerfd_settime(fd, TFD_TIMER_ABSTIME, &its, nullptr);
}
private:
static inline uint64_t GenID() {
return gid++;
}
static uint64_t gid;
set<TimerNode, std::less<>> timeouts;
};
uint64_t Timer::gid = 0;
int main() {
int epfd = epoll_create(1);
// 创建一个定时器文件描述符
int timerfd = timerfd_create(CLOCK_MONOTONIC, 0);
struct epoll_event ev = {.events=EPOLLIN | EPOLLET};
epoll_ctl(epfd, EPOLL_CTL_ADD, timerfd, &ev);
unique_ptr<Timer> timer = make_unique<Timer>();
int i = 0;
timer->AddTimer(1000, [&](const TimerNode &node) {
cout << Timer::GetTick() << " node id:" << node.id << " revoked times:" << ++i << endl;
});
timer->AddTimer(1000, [&](const TimerNode &node) {
cout << Timer::GetTick() << " node id:" << node.id << " revoked times:" << ++i << endl;
});
timer->AddTimer(3000, [&](const TimerNode &node) {
cout << Timer::GetTick() << " node id:" << node.id << " revoked times:" << ++i << endl;
});
auto node = timer->AddTimer(2100, [&](const TimerNode &node) {
cout << Timer::GetTick() << " node id:" << node.id << " revoked times:" << ++i << endl;
});
timer->DelTimer(node);
cout << "now time:" << Timer::GetTick() << endl;
struct epoll_event evs[64] = {0};
while (true) {
//设置定时器的参数
timer->UpdateTimerfd(timerfd);
int n = epoll_wait(epfd, evs, 64, -1);
time_t now = Timer::GetTick();
for (int i = 0; i < n; i++) {
// for network event handle
}
timer->HandleTimer(now);
}
epoll_ctl(epfd, EPOLL_CTL_DEL, timerfd, &ev);
close(timerfd);
close(epfd);
return 0;
}
五、利用多级时间轮实现定时器
时间轮 timewheel 是一个环形结构,使用 hash + list 实现。高层级的每一个格子,存储底层级的一个list。
根据轮子的类型,可以分为主动轮(层级1)和从动轮。
- 主动轮:当刻度指针指向当前槽的时候,槽内的任务被顺序执行。
- 从动轮:当对应轮的刻度指针指向当前槽位的时候,槽内的任务链依次向低级轮(序号较高的轮)转移,从动轮没有执行任务权限,只是对任务进行记录与缓存。
以 skynet 为例,skynet 作为单 reactor模型,适用于 cpu 密集型的场景。timer 由 timer 线程管理,当有定时任务时将任务派发给其他线程执行。
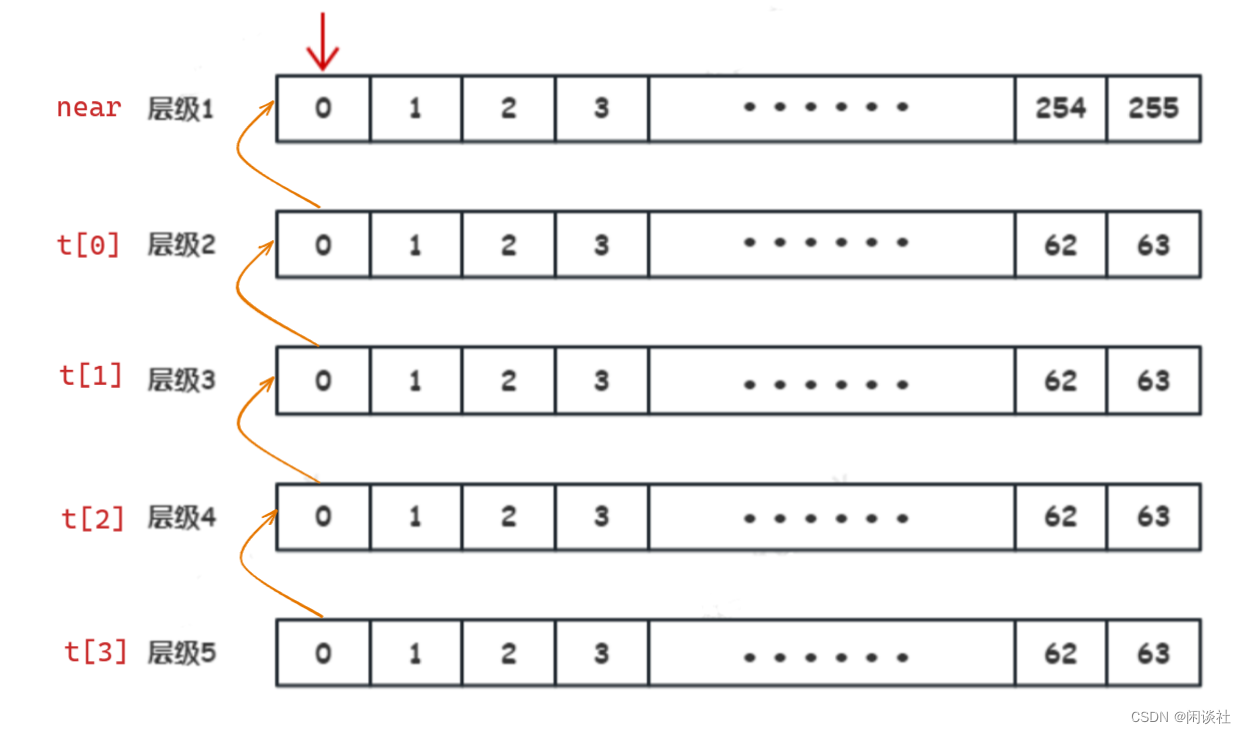
5.1 数据结构
如上图,定义了5个链表数组,每个数组里包含多个定时器链表,near 数组大小为 256 = 2 8 256 = 2^8 256=28,其余数组大小为 64 = 2 8 64 = 2^8 64=28,表示的时间范围 2 32 2^{32} 232。
我们只关注主动轮near数组,因为里面的任务是最近要触发执行的。
注意到
2
32
−
1
2^{32} - 1
232−1刚好是uint32_t的最大值。因此我们只需要一个time指针,就可以根据位运算,得到任务触发时间在各层级的位置。当 time 溢出时,32位无符号循环,再次从0开始计数。
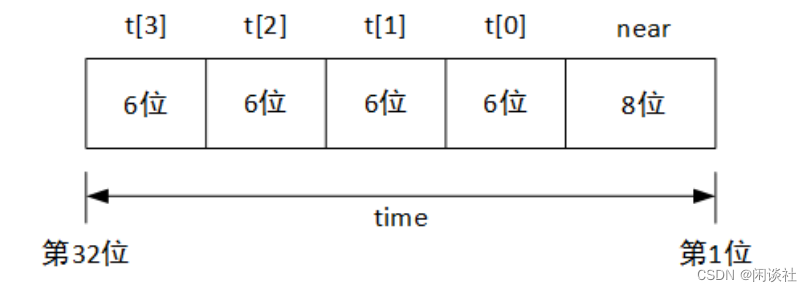
举个例子,如果触发时间是562568,对应二进制是100010 010101 10001000。near位的十进制是136,t[0]位的十进制是41,t[1]位的十进制是67。
1)定时器的结构
typedef struct timer {
link_list_t near[TIME_NEAR]; // 最低级的时间轮,主动轮
link_list_t t[4][TIME_LEVEL]; // 其他层级的时间轮,从动轮
struct spinlock lock; // 自旋锁,O(1)
uint32_t time; // tick 指针,当前时间片
uint64_t current; // 从系统开始时刻到现在的时长,timer运行时间,时间精度10ms
uint64_t current_point; // 系统启动时长,时间精度10ms
}s_timer_t;
2)任务结点的设计
任务结点使用链表存储,链表中存储同一时间触发的任务结点
struct timer_node {
struct timer_node *next; // 指向的下一个任务
uint32_t expire; // 任务触发时间
handler_pt callback; // 任务回调函数
uint8_t cancel; // 删除任务的标记,取消任务的执行
int id; // 执行该任务的线程 id
};
5.2 接口设计
5.2.1 初始化定时器
// 初始化定时器
void init_timer(void) {
TI = timer_create_timer(); // 创建定时器
TI->current_point = gettime(); // 获取系统当前运行时间
}
// 创建定时器
s_timer_t* timer_create_timer() {
s_timer_t *r = (s_timer_t *)malloc(sizeof(s_timer_t));
memset(r, 0, sizeof(*r));
int i, j;
// 创建主动轮,最低级时间轮
for (i = 0; i < TIME_NEAR; ++i) {
//清除指定链表,并返回指向链表的第一个节点的指针
link_clear(&r->near[i]);
}
// 创建从动轮,高层级时间轮
for (i = 0; i < 4; ++i) {
for (j = 0;j < TIME_LEVEL; ++j) {
link_clear(&r->t[i][j]);
}
}
// 初始化自旋锁
spinlock_init(&r->lock);
r->current = 0;
return r;
}
// 获得从系统启动开始计时的时间,不受系统时间被用户改变的影响,精确到1/100秒
uint64_t gettime() {
uint64_t t;
#if !defined(__APPLE__) || defined(AVAILABLE_MAC_OS_X_VERSION_10_12_AND_LATER)
struct timespec ti;
clock_gettime(CLOCK_MONOTONIC, &ti); // CLOCK_MONOTONIC
t = (uint64_t)ti.tv_sec * 1000;
t += ti.tv_nsec / 1000000;
#else
struct timeval tv;
gettimeofday(&tv, NULL);
t = (uint64_t)tv.tv_sec * 100;
t += tv.tv_usec / 10000;
#endif
return t;
}
5.2.2 添加定时器
32位无符号整数time记录时间片分别对应数组near[256]和t[4][64],每次添加节点时,如果expire - time < 256则将节点添加到near数组对应元素的链表中,否则从高位往低位依次比较expire的第i个6位二进制的值n与time的第i个6位二进制的值m,哪个不相等则将节点添加到数组t[4-i][n]对应的元素链表中)
具体来说:
- 首先检查节点的
expire与time的高24位是否相等,相等则将该节点添加到expire低8位值对应数组near的元素的链表中,不相等则进行下一步。 - 检查
expire与time的高18位是否相等,相等则将该节点添加到expire低第9位到第14位对应的6位二进制值对应数组t[0]的元素的链表中,如果不相等则进行下一步。 - 检查
expire与time的高12位是否相等,相等则将该节点添加到expire低第15位到第20位对应的6位二进制值对应数组t[1]的元素的链表中,如果不相等则进行下一步。 - 检查
expire与time的高6位是否相等,相等则将该节点添加到expire低第21位到第26位对应的6位二进制值对应数组t[2]的元素的链表中,如果不相等则进行下一步。 - 将该节点添加到
expire低第27位到第32位对应的6位二进制值对应数组t[3]的元素的链表中
先看一下位操作:
1 << n:表示将二进制数 1 向左移动 n 位,即
2
n
2^n
2n。
(time>>TIME_NEAR_SHIFT) & TIME_LEVEL_MASK):表示time右移8位,然后与TIME_LEVEL_MASK相与,得到的是t[0]处的位置。
// 添加任务结点到定时器中
// 根据 msec 判断结点应该放入时间轮的层级
void add_node(s_timer_t *T, timer_node_t *node) {
uint32_t time = node->expire; // 过期时间
uint32_t current_time=T->time; // 当前时间
uint32_t msec = time - current_time; // 剩余时间
//根据 expire-time 的差值将结点放入相应的层级
//[0, 2^8)
if (msec < TIME_NEAR) {
link(&T->near[time&TIME_NEAR_MASK],node);
}
//[2^8, 2^14)
else if (msec < (1 << (TIME_NEAR_SHIFT+TIME_LEVEL_SHIFT))) {
link(&T->t[0][((time>>TIME_NEAR_SHIFT) & TIME_LEVEL_MASK)],node);
}
//[2^14, 2^20)
else if (msec < (1 << (TIME_NEAR_SHIFT+2*TIME_LEVEL_SHIFT))) {
link(&T->t[1][((time>>(TIME_NEAR_SHIFT + TIME_LEVEL_SHIFT)) & TIME_LEVEL_MASK)],node);
}
//[2^20, 2^26)
else if (msec < (1 << (TIME_NEAR_SHIFT+3*TIME_LEVEL_SHIFT))) {
link(&T->t[2][((time>>(TIME_NEAR_SHIFT + 2*TIME_LEVEL_SHIFT)) & TIME_LEVEL_MASK)],node);
}
//[2^26, 2^32)
else {
link(&T->t[3][((time>>(TIME_NEAR_SHIFT + 3*TIME_LEVEL_SHIFT)) & TIME_LEVEL_MASK)],node);
}
}
// 添加定时任务
timer_node_t* add_timer(int time, handler_pt func, int threadid) {
timer_node_t *node = (timer_node_t *)malloc(sizeof(*node));
spinlock_lock(&TI->lock);
// 设置定时任务结点的属性
node->expire = time + TI->time; // 添加触发时间 = 触发时间间隔 + 当前时间
node->callback = func; // 添加任务回调函数
node->id = threadid; // 添加执行该任务的线程id
// 判断是否需要立即执行任务
if (time <= 0) {
spinlock_unlock(&TI->lock);
node->callback(node);
free(node);
return NULL;
}
// 添加任务结点到定时器中
add_node(TI, node);
spinlock_unlock(&TI->lock);
return node;
}
5.2.3 删除定时器
由于结点位置可能发生变化(重新映射),不能找到任务结点的位置,无法删除。
在结点中添加一个 cancel 字段,任务触发碰到该标记则不执行任务,之后统一释放空间。
void del_timer(timer_node_t *node) {
node->cancel = 1;
}
5.2.4 更新定时器
主要包括对到期任务的处理和对从动轮任务(time高24位对应的链表)的重新映射。
void timer_update(s_timer_t *T) {
spinlock_lock(&T->lock);
// shift time first, and then dispatch timer message
timer_execute(T); //检查当前的时间片的低8位对应的数组元素的链表是否为空,不为空则取出
// shift time first, and then dispatch timer message
timer_shift(T); //检查当前的时间片的低8位对应的数组元素的链表是否为空,不为空则取出
// 若发生重新映射,若time的指向有任务,则需要执行
timer_execute(T);
spinlock_unlock(&T->lock);
}
5.2.5 到期任务的处理
以当前 tick 值的低8位作为索引,取出 near 数组中对应的 list。list 里面包含了所有在该 tick 到期的定时器任务
//检查当前的时间片的低8位对应的数组元素的链表是否为空,不为空则取出
void timer_execute(s_timer_t *T) {
// 取出time低8位对应的索引值
int idx = T->time & TIME_NEAR_MASK;
// 如果低8位值对应的near数组元素有链表,则取出
while (T->near[idx].head.next) {
// 取出对应的定时器list
timer_node_t *current = link_clear(&T->near[idx]);
spinlock_unlock(&T->lock);
// 将链表各结点的任务派发出去
dispatch_list(current);
spinlock_lock(&T->lock);
}
}
// 任务派发
void dispatch_list(timer_node_t *current) {
do {
timer_node_t *temp = current;
current=current->next;
// cancel 标记为0,执行任务回调函数;否则,不执行任务回调
if (temp->cancel == 0)
temp->callback(temp);
free(temp);
} while (current);
}
5.2.6 刷新时间片,重新映射
只有主动轮的结点要执行,从动轮只是存储结点,主动轮结点执行完后,需要从动轮补充。
具体操作是
- 检查
time是否溢出,如果溢出则将t[3][0]这个链表取出并依次将该链表中的节点添加(即实现该链表的移动操作),如果time未溢出,则进行下一步。 - 检查
time低8位是否溢出产生进位,没有则结束,有则检查time的低第9位到第14位是否产生溢出,没有则将time的低第9位到第14位对应的值对应数组t[0]中的链表取出,并依次将该链表中的节点添加(即实现该链表的移动操作),如果有溢出,则进行下一步。 - 检查
time低14位是否溢出产生进位,没有则结束,有则检查time的低第15位到第20位是否产生溢出,没有则将time的低第15位到第20位对应的值对应数组t[1]中的链表取出,并依次将该链表中的节点添加(即实现该链表的移动操作),如果有溢出,则进行下一步。 - 检查
time低20位是否溢出产生进位,没有则结束,有则检查time的低第21位到第26位是否产生溢出,没有则将time的低第21位到第26位对应的值对应数组t[2]中的链表取出,并依次将该链表中的节点添加(即实现该链表的移动操作),如果有溢出,则进行下一步。 - 检查
time低26位是否溢出产生进位,没有则结束,有则检查time的低第27位到第32位是否产生溢出,没有则将time的低第27位到第32位对应的值对应数组t[3]中的链表取出,并依次将该链表中的节点添加(即实现该链表的移动操作)。
所谓溢出,就是移动一轮了,就跟秒针转动一圈,重新计数一样。重新计数,分针也需要移动。也就是主动轮移动一轮,现在要移动下一轮,此时需要把从动轮的任务映射过去。
比如。低八位11111111对应是255,加1就是1 00000000对应是256,低八位都是0溢出。
// 重新映射,判断是否需要重新映射
// 时间片time自加1,将高24位对应的4个6位的数组中的各个元素的链表往低位移
void timer_shift(s_timer_t *T) {
int mask = TIME_NEAR;
// 时间片+1
uint32_t ct = ++T->time;
// 时间片溢出,无符号整数,循环,time重置0
if (ct == 0) {
// 将对应的t[3][0]链表取出,重新移动到定时器中
move_list(T, 3, 0);
}
else {
// ct右移8位,进入到从动轮
uint32_t time = ct >> TIME_NEAR_SHIFT;
// 第 i 层时间轮
int i = 0;
// 判断是否需要重新映射?
// 即循环判断当前层级对应的数位是否全0,即溢出产生进位
while ((ct & (mask-1))==0) {
// 取当前层级的索引值
int idx = time & TIME_LEVEL_MASK;
// idx=0 说明当前层级溢出,继续循环判断直至当前层级不溢出
if (idx != 0) {
// 将对应的t[i][idx]链表取出,依次移动到定时器中
move_list(T, i, idx);
break;
}
mask <<= TIME_LEVEL_SHIFT; // mask 右移
time >>= TIME_LEVEL_SHIFT; // time 左移
++i; // 时间轮层级增加
}
}
}
5.3 定时器的驱动
// timer 线程中,每过1/4时间精度,即2.5ms,执行一次定时器的检测
while (!ctx.quit) {
expire_timer();
usleep(2500);
}
刷新定时器,每过1/4时间精度执行一次
// 原因是 dispatch 分发任务花费时间,影响精度
void expire_timer(void) {
// 获取当前系统运行时间,不受用户的影响
uint64_t cp = gettime();
// 当前系统启动时间与定时器记录的系统启动时间不相等
if (cp != TI->current_point) {
// 获取上述两者的差值
uint32_t diff = (uint32_t)(cp - TI->current_point);
// 更新定时器记录的系统运行时间
TI->current_point = cp;
// 更新timer的运行时间
TI->current += diff;
// 更新定时器的时间(time的值),并执行对应的过期任务
int i;
for (i=0; i<diff; i++) {
// 每执行一次timer_update,其内部的函数
// timer_shift: time+1,time代表从timer启动后至今一共经历了多少次tick
// timer_execute: 执行near中的定时器
timer_update(TI);
}
}
}
5.4 代码实现
1)timer_wheel.h
#ifndef _MARK_TIMEWHEEL_
#define _MARK_TIMEWHEEL_
#include <stdint.h>
#define TIME_NEAR_SHIFT 8
#define TIME_NEAR (1 << TIME_NEAR_SHIFT) // 1 << 8 表示将二进制数 1 向左移动 8 位,即 2^8 = 256
#define TIME_LEVEL_SHIFT 6
#define TIME_LEVEL (1 << TIME_LEVEL_SHIFT) // 1 << 6 表示将二进制数 1 向左移动 6 位,即 2^6 = 64
#define TIME_NEAR_MASK (TIME_NEAR-1) // 255
#define TIME_LEVEL_MASK (TIME_LEVEL-1) // 63
typedef struct timer_node timer_node_t;
typedef void (*handler_pt) (struct timer_node *node);
// 任务结点
struct timer_node {
struct timer_node *next; // 相同过期时间的待执行的下一个任务
uint32_t expire; // 任务过期时间
handler_pt callback; // 任务回调函数
uint8_t cancel; // 删除任务,遇到该标记则取消任务的执行
int id; // 此时携带参数
};
timer_node_t* add_timer(int time, handler_pt func, int threadid);
void expire_timer(void);
void del_timer(timer_node_t* node);
void init_timer(void);
void clear_timer();
#endif
2)timer_wheel.c
// timer_wheel.c
#include "spinlock.h"
#include "timewheel.h"
#include <string.h>
#include <stddef.h>
#include <stdlib.h>
#if defined(__APPLE__)
#include <AvailabilityMacros.h>
#include <sys/time.h>
#include <mach/task.h>
#include <mach/mach.h>
#else
#include <time.h>
#endif
typedef struct link_list {
timer_node_t head;
timer_node_t *tail;
}link_list_t;
// 定时器的数据结构
typedef struct timer {
link_list_t near[TIME_NEAR]; // 最低级的时间轮,主动轮
link_list_t t[4][TIME_LEVEL]; // 其他层级的时间轮,从动轮
struct spinlock lock; // 自旋锁,O(1)
uint32_t time; // tick 指针,当前时间片
uint64_t current; // timer运行时间,精度10ms
uint64_t current_point; // 系统运行时间,精度10ms
}s_timer_t;
static s_timer_t * TI = NULL;
// 清空链表
// 并返回指向链表的第一个结点的指针
timer_node_t* link_clear(link_list_t *list) {
// 指向头指针的下一个位置
timer_node_t * ret = list->head.next;
// 头结点断链
list->head.next = 0;
// 尾指针指向头结点
list->tail = &(list->head);
return ret;
}
// 尾插法
void link(link_list_t *list, timer_node_t *node) {
list->tail->next = node;
list->tail = node;
node->next=0;
}
// 添加任务结点到定时器中
// 根据 time 判断结点应该放入时间轮的层级
void add_node(s_timer_t *T, timer_node_t *node) {
uint32_t time = node->expire; // 过期时间
uint32_t current_time=T->time; // 当前时间
uint32_t msec = time - current_time; // 剩余时间
//根据 expire-time 的差值将结点放入相应的层级
//[0, 2^8)
if (msec < TIME_NEAR) {
link(&T->near[time&TIME_NEAR_MASK],node);
}
//[2^8, 2^14)
else if (msec < (1 << (TIME_NEAR_SHIFT+TIME_LEVEL_SHIFT))) {
link(&T->t[0][((time>>TIME_NEAR_SHIFT) & TIME_LEVEL_MASK)],node);
}
//[2^14, 2^20)
else if (msec < (1 << (TIME_NEAR_SHIFT+2*TIME_LEVEL_SHIFT))) {
link(&T->t[1][((time>>(TIME_NEAR_SHIFT + TIME_LEVEL_SHIFT)) & TIME_LEVEL_MASK)],node);
}
//[2^20, 2^26)
else if (msec < (1 << (TIME_NEAR_SHIFT+3*TIME_LEVEL_SHIFT))) {
link(&T->t[2][((time>>(TIME_NEAR_SHIFT + 2*TIME_LEVEL_SHIFT)) & TIME_LEVEL_MASK)],node);
}
//[2^26, 2^32)
else {
link(&T->t[3][((time>>(TIME_NEAR_SHIFT + 3*TIME_LEVEL_SHIFT)) & TIME_LEVEL_MASK)],node);
}
}
// 添加定时任务
timer_node_t* add_timer(int time, handler_pt func, int threadid) {
timer_node_t *node = (timer_node_t *)malloc(sizeof(*node));
spinlock_lock(&TI->lock);
// 设置定时任务结点的属性
node->expire = time + TI->time; // 添加任务触发时间 expire = time + tick
node->callback = func; // 添加任务回调函数
node->id = threadid; // 添加执行该任务的线程id
// 判断是否需要立即执行任务
if (time <= 0) {
spinlock_unlock(&TI->lock);
node->callback(node);
free(node);
return NULL;
}
// 添加任务结点到定时器中
add_node(TI, node);
spinlock_unlock(&TI->lock);
return node;
}
// 移动链表
// 第level层第idx个位置的链表结点重新添加到定时器T中
void move_list(s_timer_t *T, int level, int idx) {
timer_node_t *current = link_clear(&T->t[level][idx]);
while (current) {
timer_node_t *temp = current->next;
add_node(T, current);
current = temp;
}
}
// 重新映射,判断是否需要重新映射
// 时间片time自加1,将高24位对应的4个6位的数组中的各个元素的链表往低位移
void timer_shift(s_timer_t *T) {
int mask = TIME_NEAR;
// 时间片+1
uint32_t ct = ++T->time;
// 时间片溢出,无符号整数,循环,time重置0
if (ct == 0) {
// 将对应的t[3][0]链表取出,重新移动到定时器中
move_list(T, 3, 0);
}
else {
// ct右移8位,进入到从动轮
uint32_t time = ct >> TIME_NEAR_SHIFT;
// 第 i 层时间轮
int i = 0;
// 判断是否需要重新映射?
// 即循环判断当前层级对应的数位是否全0,即溢出产生进位
while ((ct & (mask-1))==0) {
// 取当前层级的索引值
int idx = time & TIME_LEVEL_MASK;
// idx=0 说明当前层级溢出,继续循环判断直至当前层级不溢出
if (idx != 0) {
// 将对应的t[i][idx]链表取出,依次移动到定时器中
move_list(T, i, idx);
break;
}
mask <<= TIME_LEVEL_SHIFT; // mask 右移
time >>= TIME_LEVEL_SHIFT; // time 左移
++i; // 时间轮层级增加
}
}
}
// 任务派发给其他线程执行
void dispatch_list(timer_node_t *current) {
do {
timer_node_t *temp = current;
current=current->next;
// cancel 标记为0,执行任务回调函数
if (temp->cancel == 0)
temp->callback(temp);
free(temp);
} while (current);
}
// 执行任务
// 以time的低8位对应的near数组的索引,取出该位置对应的list
void timer_execute(s_timer_t *T) {
// 取出time低8位对应的值
int idx = T->time & TIME_NEAR_MASK;
// 如果低8位值对应的near数组元素有链表,则取出
while (T->near[idx].head.next) {
// 取出对应的定时器list
timer_node_t *current = link_clear(&T->near[idx]);
spinlock_unlock(&T->lock);
// 将链表各结点的任务派发出去
dispatch_list(current);
spinlock_lock(&T->lock);
}
}
// 定时器更新
void timer_update(s_timer_t *T) {
spinlock_lock(&T->lock);
// 执行任务
timer_execute(T);
/// time+1,并判断是否进行重新映射
timer_shift(T);
// 若发生重新映射,若time的指向有任务,则需要执行
timer_execute(T);
spinlock_unlock(&T->lock);
}
// 删除定时器任务
void del_timer(timer_node_t *node) {
node->cancel = 1;
}
// 创建定时器
s_timer_t * timer_create_timer() {
s_timer_t *r = (s_timer_t *)malloc(sizeof(s_timer_t));
memset(r, 0, sizeof(*r));
int i, j;
// 创建主动轮,最低级时间轮
for (i = 0; i < TIME_NEAR; ++i) {
link_clear(&r->near[i]);
}
// 创建从动轮,高层级时间轮
for (i = 0; i < 4; ++i) {
for (j = 0;j < TIME_LEVEL; ++j) {
link_clear(&r->t[i][j]);
}
}
// 初始化自旋锁
spinlock_init(&r->lock);
r->current = 0;
return r;
}
// 获取当前时间,时间精度10ms
uint64_t gettime() {
uint64_t t;
#if !defined(__APPLE__) || defined(AVAILABLE_MAC_OS_X_VERSION_10_12_AND_LATER)
struct timespec ti;
clock_gettime(CLOCK_MONOTONIC, &ti);// CLOCK_MONOTONIC,从系统启动这一刻起开始计时,不受系统时间被用户改变的影响
t = (uint64_t)ti.tv_sec * 1000;
t += ti.tv_nsec / 1000000;
#else
struct timeval tv;
gettimeofday(&tv, NULL);
t = (uint64_t)tv.tv_sec * 100;
t += tv.tv_usec / 10000;
#endif
return t;
}
// 检测定时器,时间精度10ms,每过1/4时间精度2.5ms执行1次
// 原因是dispatch分发任务花费时间,影响精度
void expire_timer(void) {
// 获取当前系统运行时间,不受系统时间被用户的影响
uint64_t cp = gettime();
// 当前系统启动时间与定时器记录的系统启动时间不相等
if (cp != TI->current_point) {
// 获取上述两者的差值
uint32_t diff = (uint32_t)(cp - TI->current_point);
// 更新定时器记录的系统运行时间
TI->current_point = cp;
// 更新timer的运行时间
TI->current += diff;
// 更新定时器的时间(time的值),并执行对应的过期任务
int i;
for (i=0; i<diff; i++) {
// 每执行一次timer_update,其内部的函数
// timer_shift: time+1,time代表从timer启动后至今一共经历了多少次tick
// timer_execute: 执行near中的定时器
timer_update(TI);
}
}
}
// 初始化定时器
void init_timer(void) {
TI = timer_create_timer(); // 创建定时器
TI->current_point = gettime(); // 获取当前时间
}
void clear_timer() {
int i,j;
for (i=0;i<TIME_NEAR;i++) {
link_list_t * list = &TI->near[i];
timer_node_t* current = list->head.next;
while(current) {
timer_node_t * temp = current;
current = current->next;
free(temp);
}
link_clear(&TI->near[i]);
}
for (i=0;i<4;i++) {
for (j=0;j<TIME_LEVEL;j++) {
link_list_t * list = &TI->t[i][j];
timer_node_t* current = list->head.next;
while (current) {
timer_node_t * temp = current;
current = current->next;
free(temp);
}
link_clear(&TI->t[i][j]);
}
}
}
3)tw-timer.c
// tw-timer.c
// gcc tw-timer.c timewheel.c -o tw -I./ -lpthread
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
#include <time.h>
#include <stdlib.h>
#include "timewheel.h"
struct context {
int quit;
int thread;
};
struct thread_param {
struct context *ctx;
int id;
};
static struct context ctx = {0};
void do_timer(timer_node_t *node) {
printf("do_timer expired:%d - thread-id:%d\n", node->expire, node->id);
add_timer(100, do_timer, node->id);
}
void do_clock(timer_node_t *node) {
static int time;
time ++;
printf("---time = %d ---\n", time);
add_timer(100, do_clock, node->id);
}
void* thread_worker(void *p) {
struct thread_param *tp = p;
int id = tp->id;
struct context *ctx = tp->ctx;
int expire = rand() % 200;
add_timer(expire, do_timer, id);
while (!ctx->quit) {
usleep(1000);
}
printf("thread_worker:%d exit!\n", id);
return NULL;
}
void do_quit(timer_node_t * node) {
ctx.quit = 1;
}
int main() {
srand(time(NULL));
ctx.thread = 2;
pthread_t pid[ctx.thread];
init_timer();
add_timer(6000, do_quit, 100);
add_timer(0, do_clock, 100);
struct thread_param task_thread_p[ctx.thread];
int i;
for (i = 0; i < ctx.thread; i++) {
task_thread_p[i].id = i;
task_thread_p[i].ctx = &ctx;
if (pthread_create(&pid[i], NULL, thread_worker, &task_thread_p[i])) {
fprintf(stderr, "create thread failed\n");
exit(1);
}
}
while (!ctx.quit) {
expire_timer();
usleep(2500); // 2.5ms
}
clear_timer();
for (i = 0; i < ctx.thread; i++) {
pthread_join(pid[i], NULL);
}
printf("all thread is closed\n");
return 0;
}
5.5 总结
skynet 是怎么样运转定时器的?
skynet的 timer 线程会不断触发 expire_timer函数,在该函数中会不断执行timer_execute对 near 中的时器执行超时操作。执行完毕后,调用 timer_shift 从t[0] ~ t[3]中选择合适的定时器节点加入到 near 中,这过程就相当于提高了定时器节点的紧急程度(因为随着时间的流逝,定时器节点的紧急程度会越来越向near逼近)。
参考资料
Skynet定时器原理