1 核心板简介
创龙科技SOM-TL3568是一款基于瑞芯微RK3568J/RK3568B2处理器设计的四核ARM Cortex-A55全国产工业核心板,每核主频高达1.8GHz/2.0GHz。核心板CPU、ROM、RAM、电源、晶振、连接器等所有器件均采用国产工业级方案,国产化率100%。
核心板通过工业级B2B连接器引出GMAC、USB、SATA、PCIe、HDMI、LVDS、RGB、MIPI、SDIO、CAN、UART、SPI、PDM、eDP等接口,支持多屏异显、Mali-G52-2EE GPU、1080P@60fps H.265/H.264视频硬件编码、4K@60fps H.265/H.264/VP9视频硬件解码,并且内置1TOPS算力NPU。核心板经过专业的PCB Layout和高低温测试验证,稳定可靠,可满足各种工业应用环境。
用户使用核心板进行二次开发时,仅需专注上层运用,降低了开发难度和时间成本,可快速进行产品方案评估与技术预研。

图 1 核心板正面图

图 2 核心板背面图

图 3 核心板斜视图

图 4 核心板侧视图
2 典型应用领域
- 工业控制
- 能源电力
- 智慧医疗
- 仪器仪表
- 安防监控
3 软硬件参数
硬件框图

图 5 核心板硬件框图
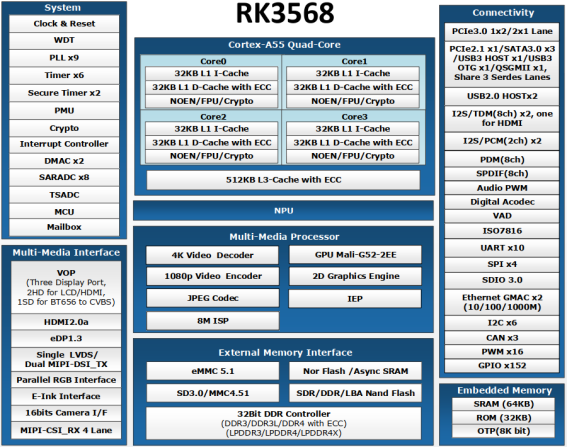
图 6处理器功能框图
硬件参数
表 1
| CPU | 瑞芯微RK3568J/RK3568B2 | |
| 4x ARM Cortex-A55(64bit),主频1.8GHz(RK3568J)/2.0GHz(RK3568B2) | ||
| NPU:1TOPS@INT8,支持INT8/INT16/FP16/BFP16 | ||
| GPU:Mali-G52-2EE,支持OpenGL ES 1.1/2.0/3.2、Vulkan 1.0/1.1、OpenCL 2.0 | ||
| Encoder:支持4096x2304@60fps H.264/H.265/VP9、1920x1088@60fps VP8、1920x1088@60fps VC1/MPEG-4/MPEG-2/MPEG-1、720x576@60fps H.263视频硬件编码 | ||
| Decoder:支持1920x1080@60fps H.264/AVC、1920x1080@60fps H.265/HEVC视频硬件解码 | ||
| ROM | 8/16/32GByte eMMC | |
| RAM | 1/2/4GByte DDR4 | |
| Video IN | 1x DVP,输入频率高达150MHz,支持8、10、12、16位模式 | |
| 1x MIPI CSI,包含4路数据通道,每路高达2.5Gbps | ||
| Video OUT | 3x Display,支持3路同时输出 | 1x RGB/BT1120,RGB888格式,支持1080P@60fps |
| 1x BT656,支持NTSC和PAL制式 | ||
| 1x LVDS,单通道输出,支持1080P@60fps 备注:与MIPI DSI0通道复用 | ||
| 1x MIPI DSI,单通道输出,支持1080P@60fps;双通道输出,支持2560x1440@60fps | ||
| 1x HDMI,HDMI 2.0,支持1080P@120fps、4096x2304@60fps | ||
| 1x eDP,eDP 1.3,支持2560x1600@60fps | ||
| 1x EBC,16bit data,支持2200x1650 | ||
| Audio | 2x 8ch I2S/TDM | |
| 2x 2ch I2S/PCM | ||
| 1x 8ch PDM | ||
| B2B Connector | 2x 80pin公座B2B连接器,2x 80pin母座B2B连接器,共320pin,间距0.5mm,合高4.0mm | |
| LED | 1x 电源指示灯 | |
| 2x 用户可编程指示灯 | ||
| 其他硬件资源 | 3x SDMMC(SDMMC0、SDMMC1、SDMMC2),支持SDIO 3.0、SD 3.0/MMC 4.51 | |
| 3x CAN,支持CAN-FD功能 | ||
| 6x I2C(I2C0~5),支持7bits和10bits地址模式,通信速率高达1Mbps 备注:核心板板载PMIC已使用I2C0,地址为0x20,I2C0同时引出至B2B连接器 | ||
| 4x SPI,支持主从模式,软件可配置 | ||
| 3x SATA 3.0,支持eSATA,通信速率高达6Gbps | ||
| 1x PCIe 2.1,支持Root Complex(RC)模式,通信速率高达5Gbps | ||
| 2x PCIe 3.0,支持1x 2Lanes或2x 1Lane模式,通信速率高达8Gbps 备注:1Lane仅支持Root Complex(RC)模式,2Lanes支持Root Complex(RC)和End Point(EP)模式 | ||
| 2x USB2.0 HOST | ||
| 1x USB3.0 HOST | ||
| 1x USB3.0 OTG | ||
| 1x QSGMII/SGMII,支持1000Mbps(SGMII模式) | ||
| 2x GMAC,支持RMII/RGMII PHY接口(10/100/1000Mbps) | ||
| 8x Timer | ||
| 16x PWM,支持32bits定时器/计数器 | ||
| 10x UART,支持4Mbps波特率 | ||
| 1x Watchdog | ||
| 1x 8ch SPDIF | ||
| 1x ISO7816 | ||
备注:部分引脚资源存在复用关系。
软件参数
表2
| 内核 | Linux-4.19.232、Linux-RT-4.19.232、翼辉SylixOS(国产实时操作系统,计划) | |
| 文件系统 | Buildroot-201802、Ubuntu、 Android 11、翼辉TpsFs(国产实时操作系统,计划) | |
| 图形界面开发工具 | Qt-5.15.2 | |
| 软件开发套件提供 | rk356x_linux_release_v1.3.1_20221120 | |
| 驱动支持 | SPI FLASH | DDR4 |
| eMMC | UART | |
| LED | KEY | |
| SDIO | HDMI OUT | |
| MIPI LCD | LVDS LCD | |
| TFT LCD | eDP OUT | |
| HEADPHONE OUT | Ethernet | |
| MIC IN | USB3.0/2.0 | |
| RS232 | RS485 | |
| CAMERA | CAN | |
| RTC | PCIe 4G/5G/NVMe | |
| WIFI | Bluetooth | |
| Touch Screen | SD | |
| ADC | ||
4 开发资料
(1)提供核心板引脚定义、可编辑底板原理图、可编辑底板PCB、芯片Datasheet,协助国产元器件方案选型,缩短硬件设计周期;
(2)提供系统固化镜像、内核驱动源码、文件系统源码,以及丰富的Demo程序;
(3)提供完整的平台开发包、入门教程,节省软件整理时间,让应用开发更简单;
(4)提供详细的ARM + FPGA异构多核架构通信教程,完美解决ARM + FPGA异构多核开发瓶颈。
开发案例主要包括:
- Linux、Linux-RT、Qt应用开发案例
- Android、Ubuntu操作系统演示案例
- 裸机、RTOS开发案例(计划)
- 翼辉SylixOS国产操作系统演示案例(计划)
- Docker容器技术、MQTT通信协议演示案例
- 4G/5G/WIFI/Bluetooth开发案例
- IgH EtherCAT主站、CAN-FD开发案例
- 多屏异显、OpenCV、视频硬件编解码开发案例
- 基于PCIe的ARM + FPGA通信开发案例
5 电气特性
工作环境
表 3
| 环境参数 | 最小值 | 典型值 | 最大值 |
| 工作温度 | -40°C | / | 85°C |
| 工作电压 | / | 5.0V | / |
功耗测试
表 4
| 工作状态 | 电压典型值 | 电流典型值 | 功耗典型值 |
| 空闲状态 | 5.0V | 0.42A | 2.10W |
备注:功耗基于TL3568-EVM评估板(CPU为RK3568J)测得。测试数据与具体应用场景有关,仅供参考。
空闲状态:系统启动,评估板不接入其他外接模块,不执行程序。
6 机械尺寸
表 5
| PCB尺寸 | 42mm*68mm |
| PCB层数 | 10层 |
| PCB板厚 | 1.6mm |
| 安装孔数量 | 4个 |

图 7 核心板机械尺寸图
7 产品型号
表 6
| 型号 | CPU | 主频 | eMMC | DDR4 | 温度级别 | 是否为 全国产 |
| SOM-TL3568-64GE8GD-I-A1.0 | RK3568J | 1.8GHz | 8GByte | 1GByte | 工业级 | 是 |
| SOM-TL3568-128GE16GD-I-A1.0 | RK3568J | 1.8GHz | 16GByte | 2GByte | 工业级 | 否 |
| SOM-TL3568-256GE32GD-I-A1.0 | RK3568J | 1.8GHz | 32GByte | 4GByte | 工业级 | 否 |
| SOM-TL3568-128GE16GD-C-A1.0 | RK3568B2 | 2.0GHz | 16GByte | 2GByte | 商业级 | 否 |
| SOM-TL3568-256GE64GD-C-A1.0 | RK3568B2 | 2.0GHz | 32GByte | 4GByte | 商业级 | 否 |
备注:标配为SOM-TL3568-64GE8GD-I-A1.0,其他型号请与相关销售人员联系。
型号参数解释
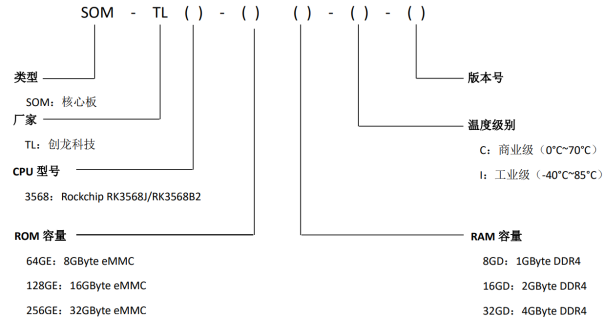
图 8
8 技术服务
(1)协助底板设计和测试,减少硬件设计失误;
(2)协助解决按照用户手册操作出现的异常问题;
(3)协助产品故障判定;
(4)协助正确编译与运行所提供的源代码;
(5)协助进行产品二次开发;
(6)提供长期的售后服务。
9 增值服务
- 主板定制设计
- 核心板定制设计
- 嵌入式软件开发
- 项目合作开发
- 技术培训