本文主要记录如何将rosbag的消息进行获取并进行发布以及后续处理。
测试数据集:
链接: https://pan.baidu.com/s/1DthWE45V5Zhq7UUrfTt_CQ 提取码: mxvn
查看数据集bag包里面都有那些话题:
rosbag info indoor_lab_RS.bag 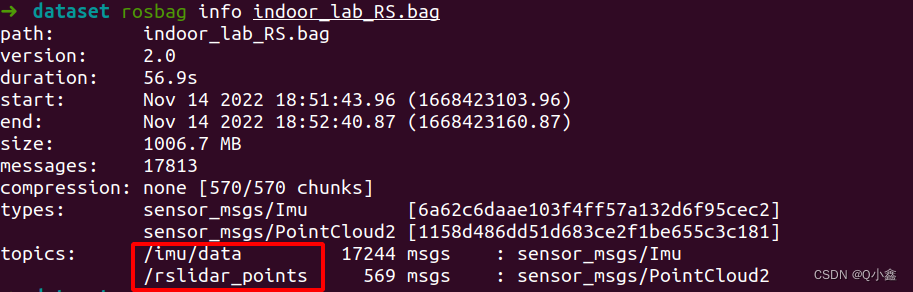
可以看到包含了两个话题topic:
- /imu/data
- /rslidar_points
本文件包含两个回调函数:
- imu回调函数(获取时间戳、角速度值、加速度值)
- lidar回调函数(获取时间戳,将消息类型转化为PCL点云,进行体素滤波下采样,并将最终下采样的点云转化为消息的类型发布出来)
#include <iostream>
#include "ros/ros.h"
#include "sensor_msgs/Imu.h"
#include "sensor_msgs/PointCloud2.h"
#include "pcl/point_types.h"
#include "pcl/filters/voxel_grid.h"
#include "pcl_ros/point_cloud.h"
// rsliar的数据结构
namespace rslidar_ros
{
struct EIGEN_ALIGN16 Point
{
PCL_ADD_POINT4D;
std::uint8_t intensity;
std::uint16_t ring = 0;
double timestamp = 0;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
};
} // namespace rslidar_ros
POINT_CLOUD_REGISTER_POINT_STRUCT(rslidar_ros::Point,
(float, x, x)(float, y, y)(float, z, z)(std::uint8_t, intensity, intensity)(std::uint16_t, ring, ring)(double, timestamp, timestamp))
bool first_imu = true;
double first_imu_time;
// IMU消息回调函数
void Imu_callback(const sensor_msgs::Imu &msg)
{
if (first_imu){
first_imu_time = msg.header.stamp.toSec(); // 获取第一帧时间戳
first_imu = false;
}
std::cout << "IMU time:" << msg.header.stamp.toSec() - first_imu_time << std::endl;
std::cout << "angular_velocity:"
<< msg.angular_velocity.x << " "
<< msg.angular_velocity.y << " "
<< msg.angular_velocity.z << std::endl;
std::cout << "linear_acceleration:"
<< msg.linear_acceleration.x << " "
<< msg.linear_acceleration.y << " "
<< msg.linear_acceleration.z << std::endl;
}
bool first_lidar = true;
double first_lidar_time;
// 下采样,体素滤波
pcl::VoxelGrid<pcl::PointXYZI> downSizeFilter;
pcl::PointCloud<pcl::PointXYZI> pl_filtered;
ros::Publisher publaserCloud;
// 雷达消息回调函数
void laser_callback(const sensor_msgs::PointCloud2 &msg)
{
if (first_lidar){
first_lidar_time = msg.header.stamp.toSec(); // 获取第一帧雷达的时间戳
first_lidar = false;
}
std::cout << "Lidar time:" << msg.header.stamp.toSec() - first_lidar_time << std::endl;
pcl::PointCloud<rslidar_ros::Point> pl_orig;
pcl::fromROSMsg(msg, pl_orig); // 从ROS的消息转化到点云PCL
int plsize = pl_orig.points.size(); // 获取点云的数量
std::cout << "Lidar point size:" << plsize << std::endl; // 原始点云的大小
pl_filtered.clear();
for (int i = 0; i < plsize; i++){
pcl::PointXYZI point;
point.x = pl_orig.points[i].x;
point.y = pl_orig.points[i].y;
point.z = pl_orig.points[i].z;
point.intensity = pl_orig.points[i].intensity;
pl_filtered.points.push_back(point);
}
// 下采样
downSizeFilter.setLeafSize(0.05, 0.05, 0.05); // 设置下采样大小
downSizeFilter.setInputCloud(pl_filtered.makeShared());
downSizeFilter.filter(pl_filtered);
std::cout << "Lidar filtered size:" << pl_filtered.points.size() << std::endl; // 滤波后的点云大小
// 将点云通过消息的类型发布出来
sensor_msgs::PointCloud2 laserCloud;
pcl::toROSMsg(pl_filtered, laserCloud);
laserCloud.header.stamp = msg.header.stamp;
laserCloud.header.frame_id = "camera_init";
publaserCloud.publish(laserCloud);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "lio_test");
ros::NodeHandle nh;
// 订阅IMU和lidar消息
ros::Subscriber imu_sub = nh.subscribe("/imu/data",10,Imu_callback);
ros::Subscriber lidar_sub = nh.subscribe("/rslidar_points",10,laser_callback);
// 发布雷达点云
publaserCloud = nh.advertise<sensor_msgs::PointCloud2>("/cloud", 100000);
while(ros::ok())
{
ros::spinOnce();
}
return 0;
}CMakeLists.txt文件:
cmake_minimum_required(VERSION 3.0.2)
project(LIO_TEST)
find_package(catkin REQUIRED COMPONENTS
pcl_ros
roscpp
sensor_msgs
std_msgs
)
find_package(PCL REQUIRED)
add_executable(lio_test src/lio_test.cpp)
target_link_libraries(lio_test
${catkin_LIBRARIES}
${PCL_LIBRARIES}
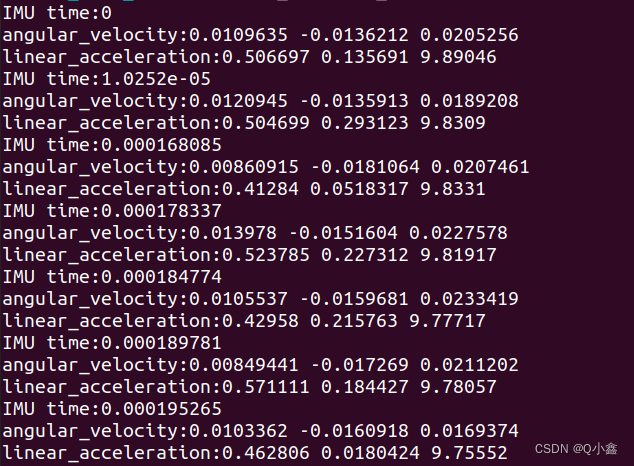
)IMU数据输出结果:
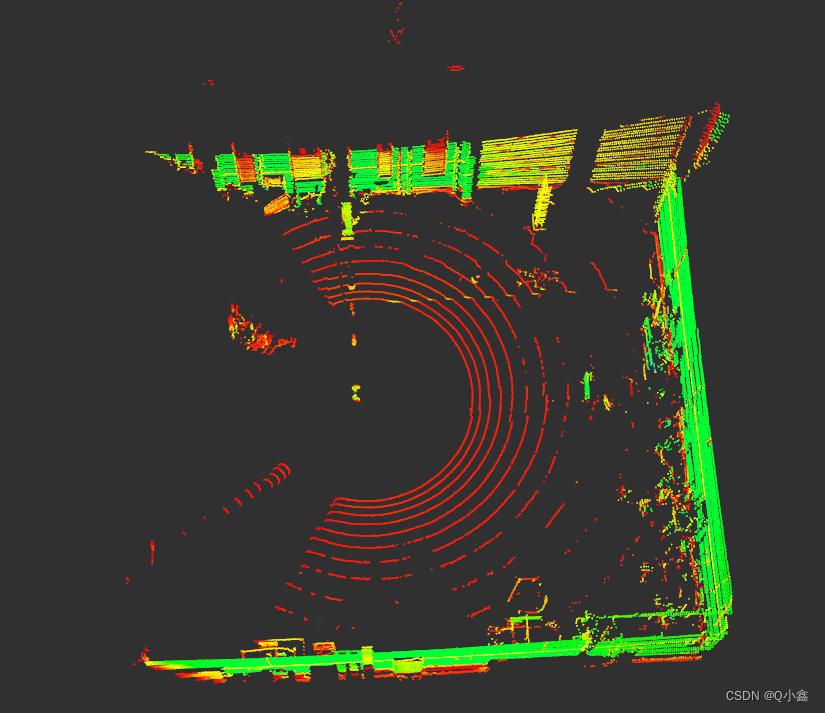
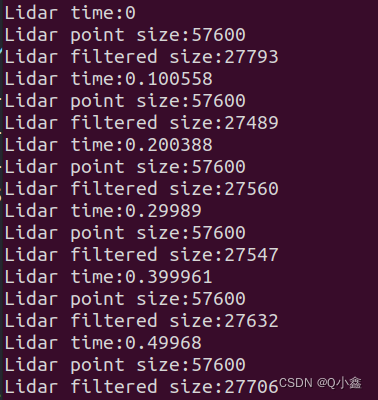
雷达数据体素滤波下采样结果:
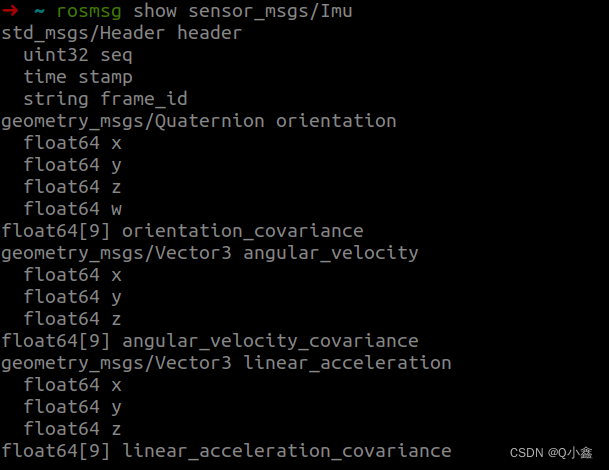
查看IMU的数据类型:
rosmsg show sensor_msgs/Imu
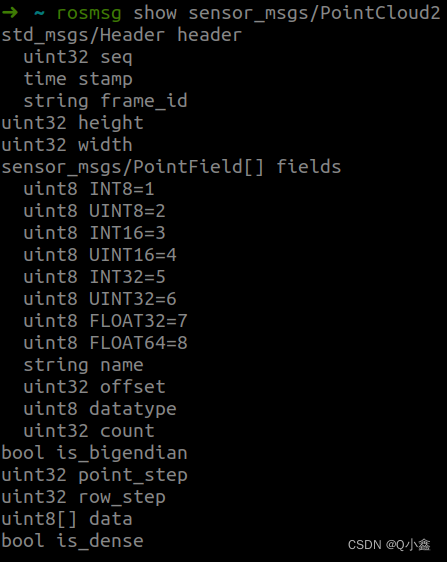
查看雷达的数据类型: