文章目录
- 一.确定IMU型号
- 二.安装驱动
- 1.找到驱动的包
- 2.解压该压缩包
- 3.安装步骤说明
- 4.具体安装
- 5.检查IMU的usb接口是否插到电脑
- 三.在RVIZ中的显示
- 1.复制示例下的src里的文件复制到自己的src下
- 2.自己的文件目录
- 3.尝试编译一下
- 4.示例的文件说明
- 5.运行Demo
- 6.配置Rviz
- 四.查看IMU的实时数据
- 1.运行消息包的launch文件
- 2.消息包的数据解释
一.确定IMU型号
超核IMU HI266 六轴IMU
官网:http://www.hipnuc.com/product_attitude_ch10x.html
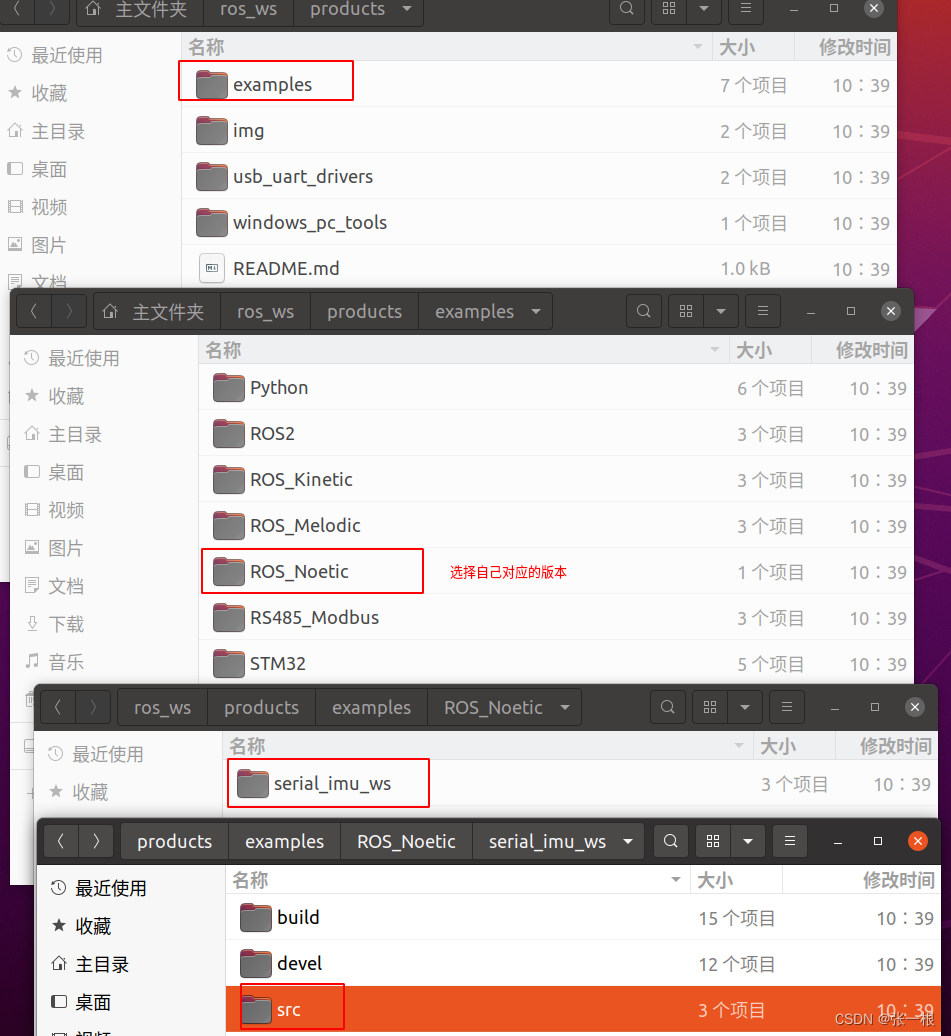
示例代码:https://gitee.com/yandld/products/tree/master/examples
二.安装驱动
1.找到驱动的包
在示例代码下的如下文件里,如下图
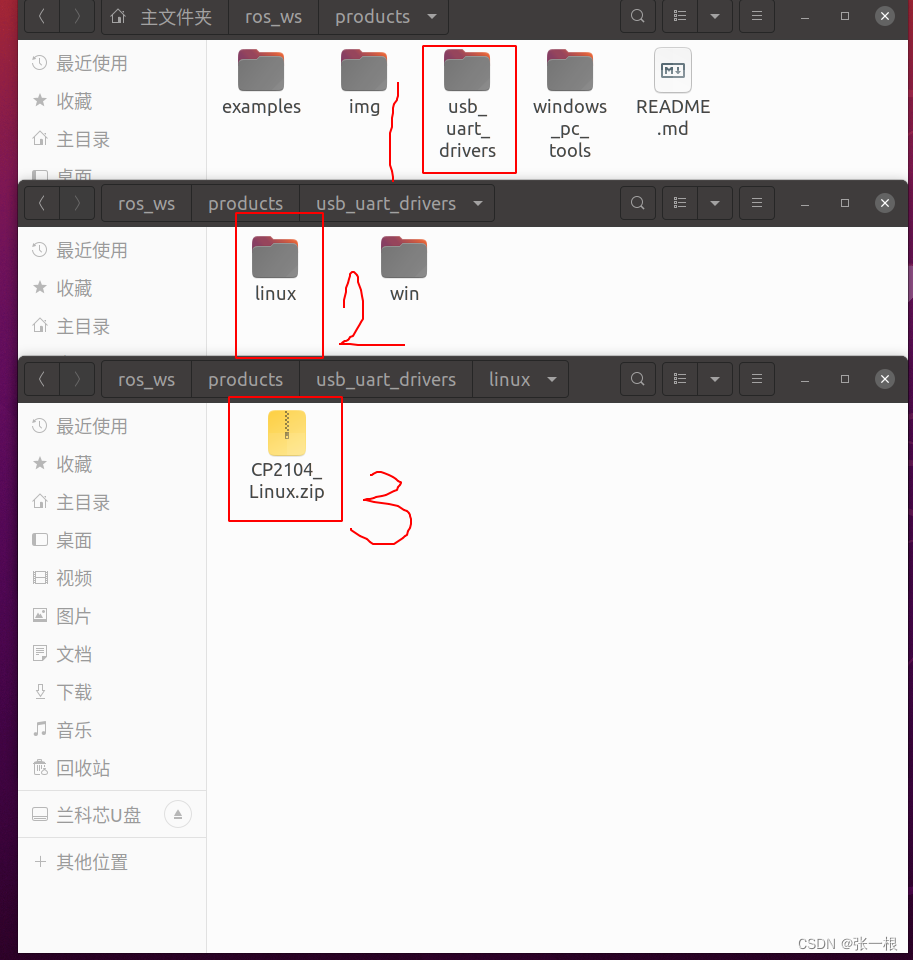
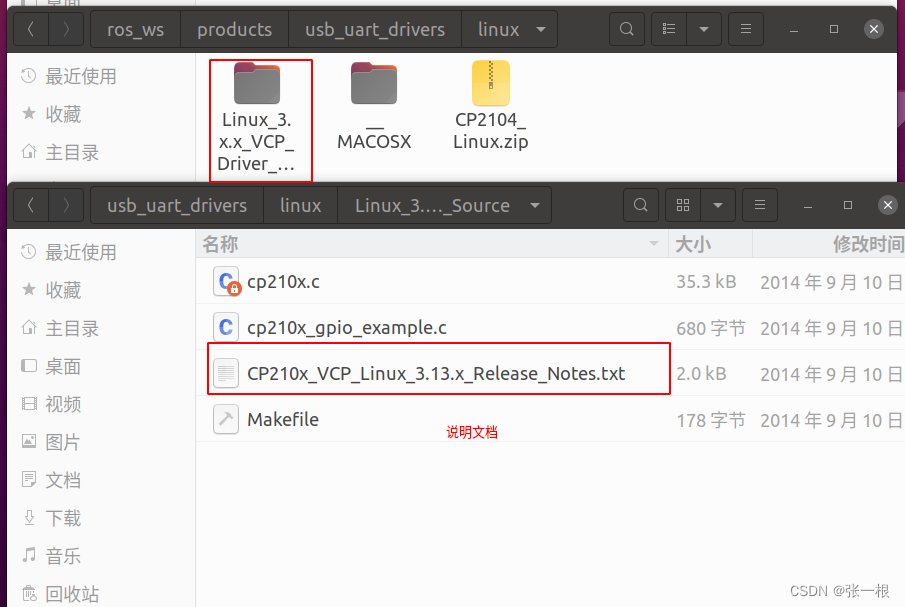
2.解压该压缩包
3.安装步骤说明
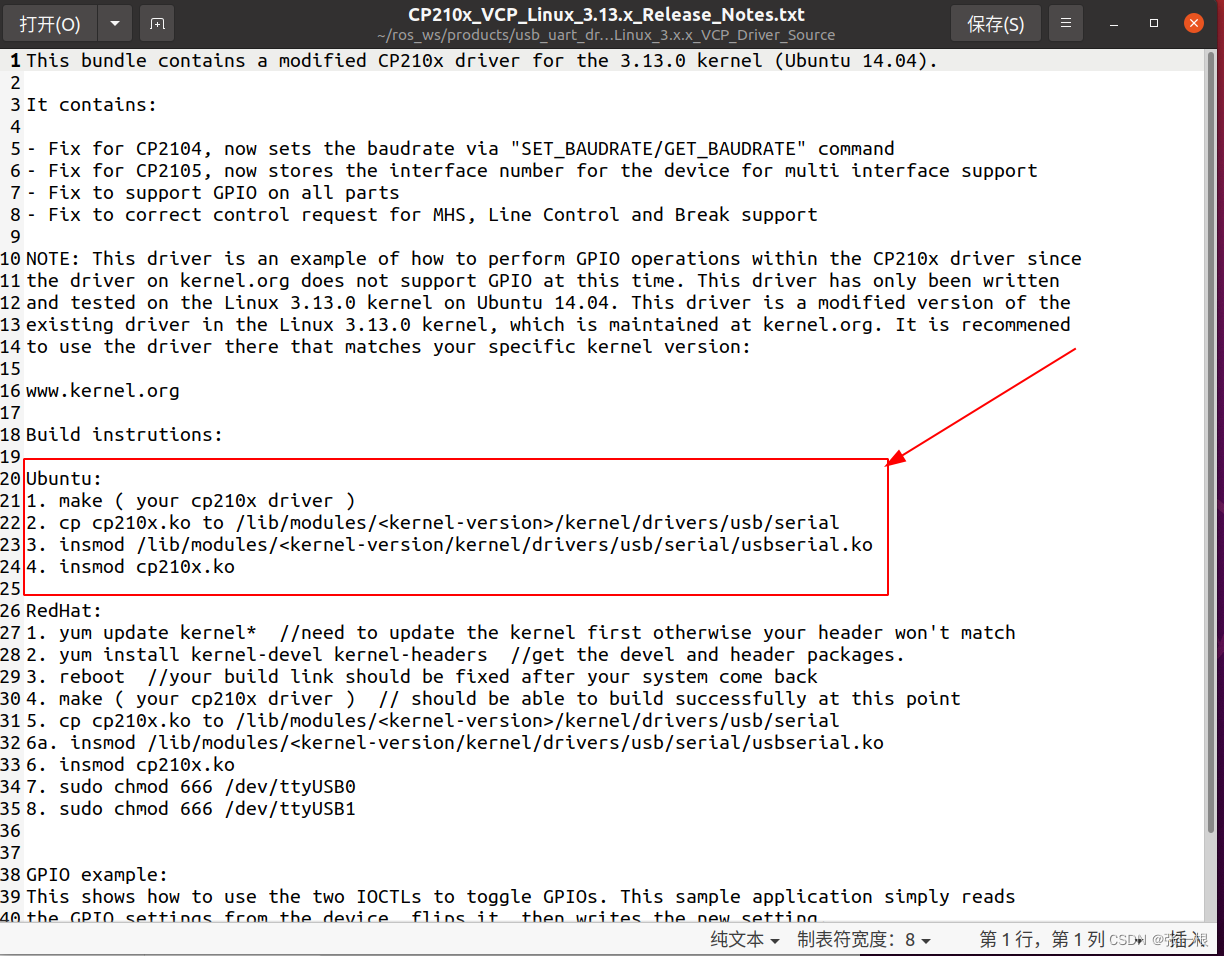
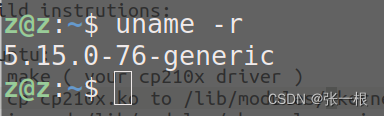
这里我们是在ubuntu里安装驱动,看上图ubuntu的安装步骤即可,需要注意的是 <kernel-version>需要改成自己电脑的内核版本,在命令行输入:
uname -r
所以我的<kernel-version>是5.15.0-76-generic
4.具体安装
在驱动解压的目录“Linux_3.x.x_VCP_Driver_Source”下,打开终端输入
make
sudo cp cp210x.ko /lib/modules/5.15.0-76-generic/kernel/drivers/usb/serial/
sudo insmod /lib/modules/5.15.0-76-generic/kernel/drivers/usb/serial/usbserial.ko
sudo insmod cp210x.ko
5.检查IMU的usb接口是否插到电脑
IMU没有插到电脑usb之前,使用命令:
ls -l /dev/ttyUSB*
无法访问;
插入接口之后,再使用该命令
ls -l /dev/ttyUSB*
可以看到是ttyUSB0–表示已经接上IMU了。
三.在RVIZ中的显示
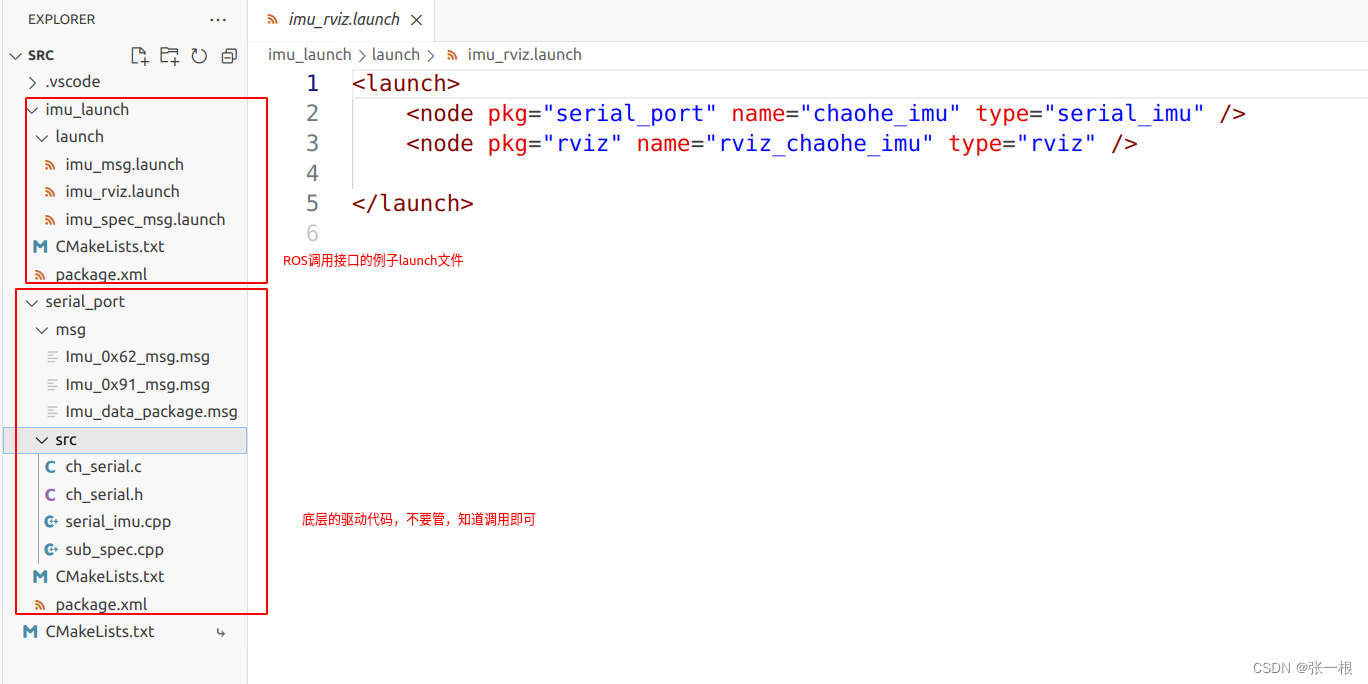
1.复制示例下的src里的文件复制到自己的src下
2.自己的文件目录
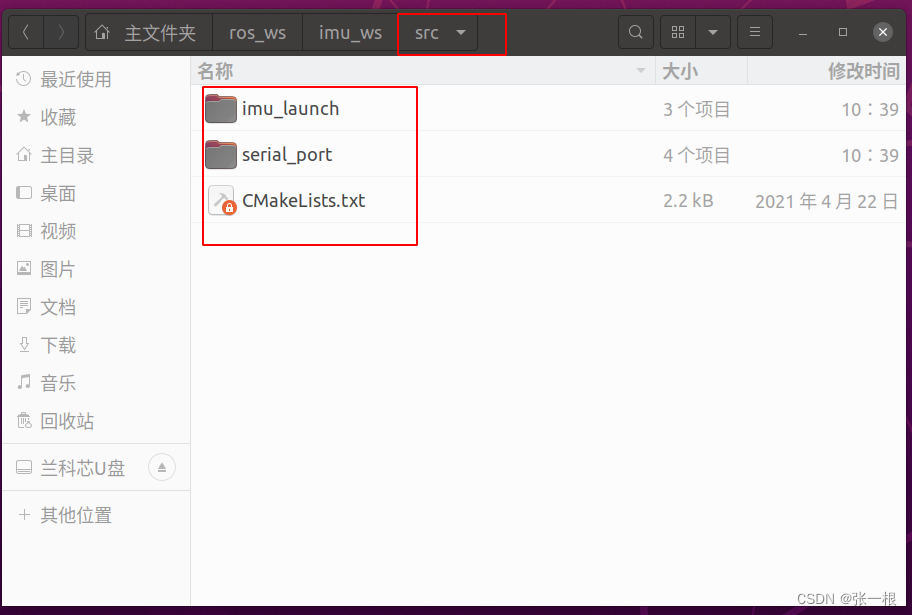
3.尝试编译一下
退到自己的工作空间下,输入编译指令
catkin_make
报错信息如下:
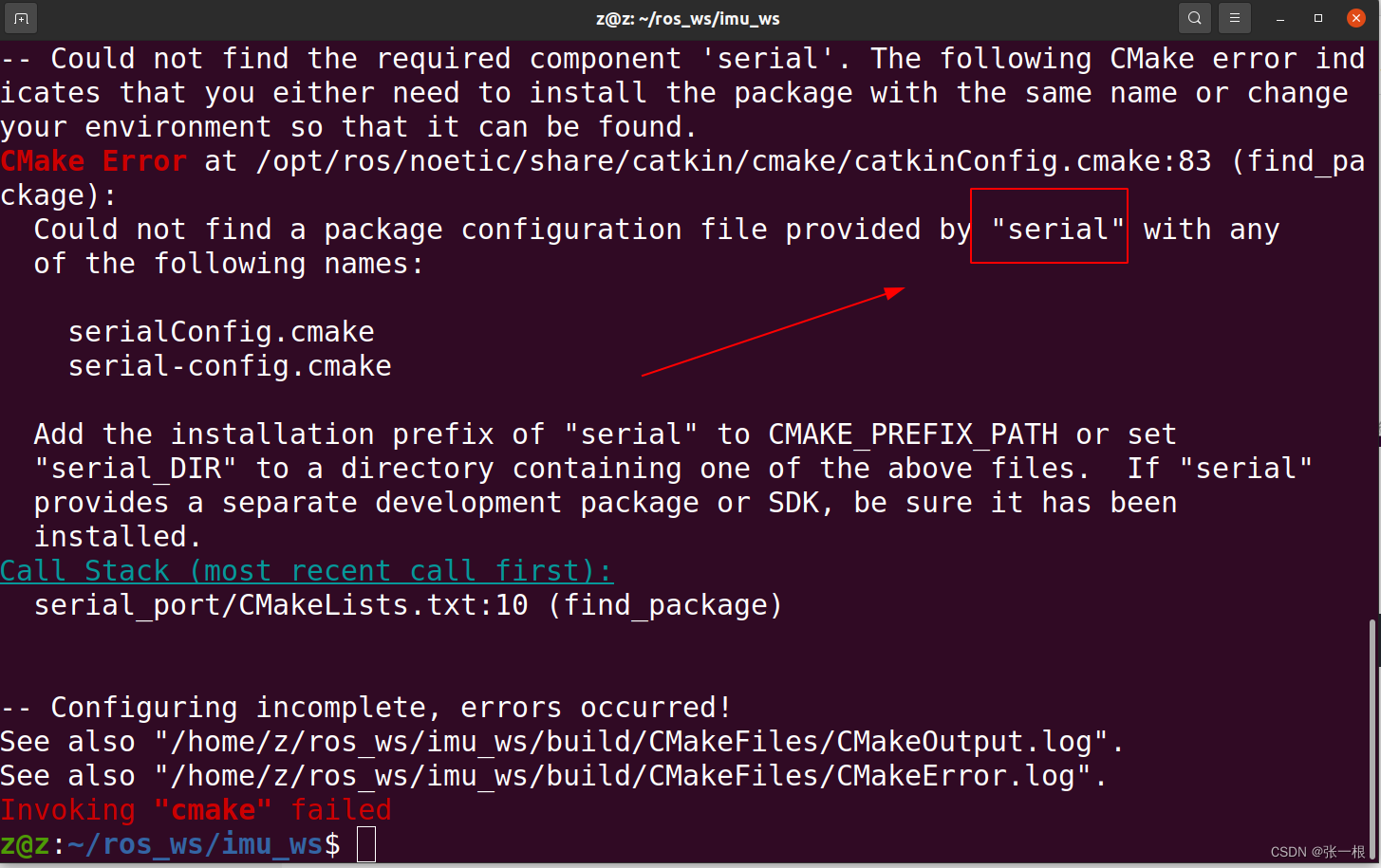
报错说明:缺少serial库。
安装对应的包即可:
sudo apt-get install ros-noetic-serial
其中noetic改成自己ros对应的版本。
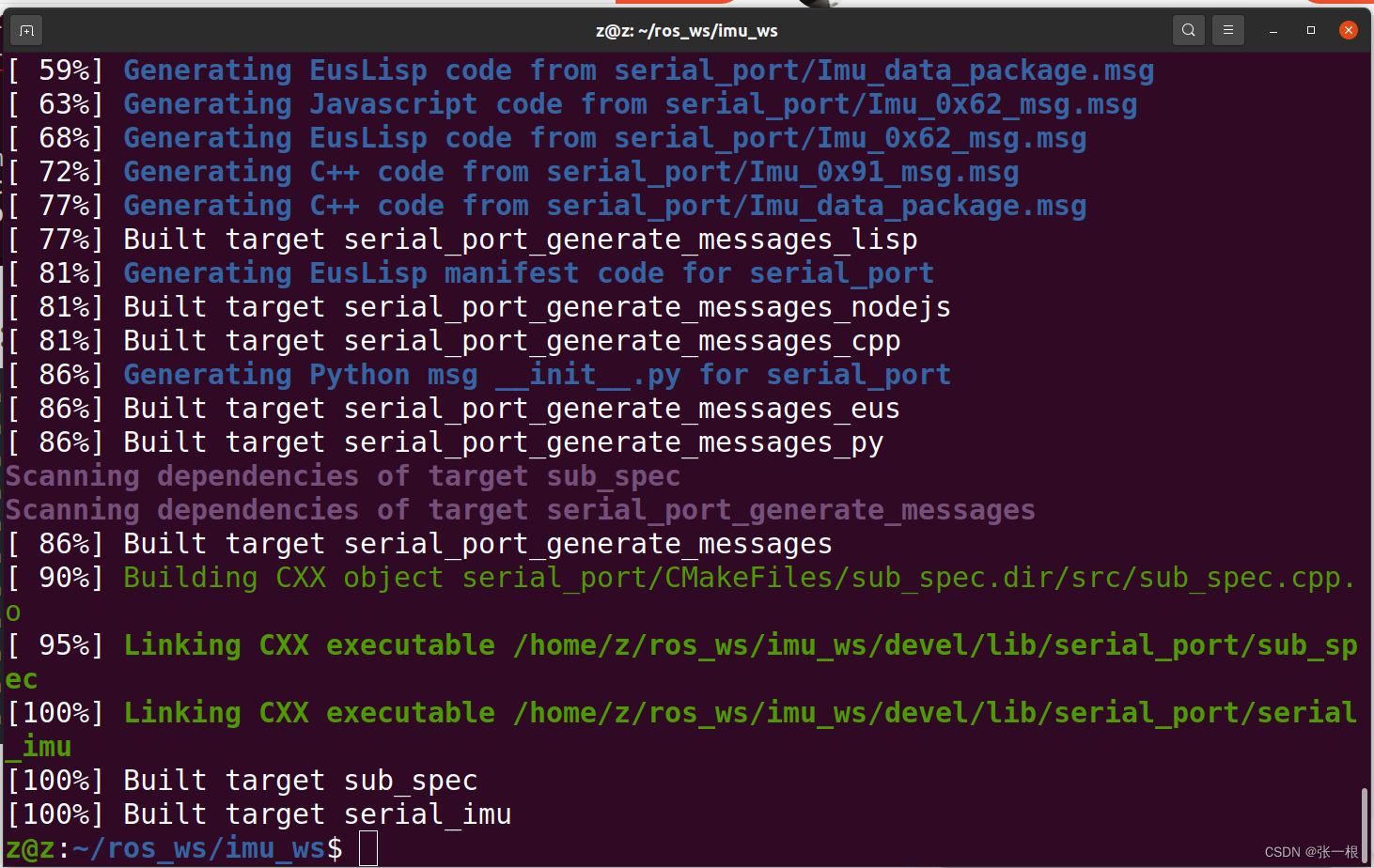
再次尝试编译:(100%表示编译完成)
4.示例的文件说明
5.运行Demo
先配置环境路径
source ./devel/setup.bash
运行imu_rviz.launch
roslaunch imu_launch imu_rviz.launch
报错信息
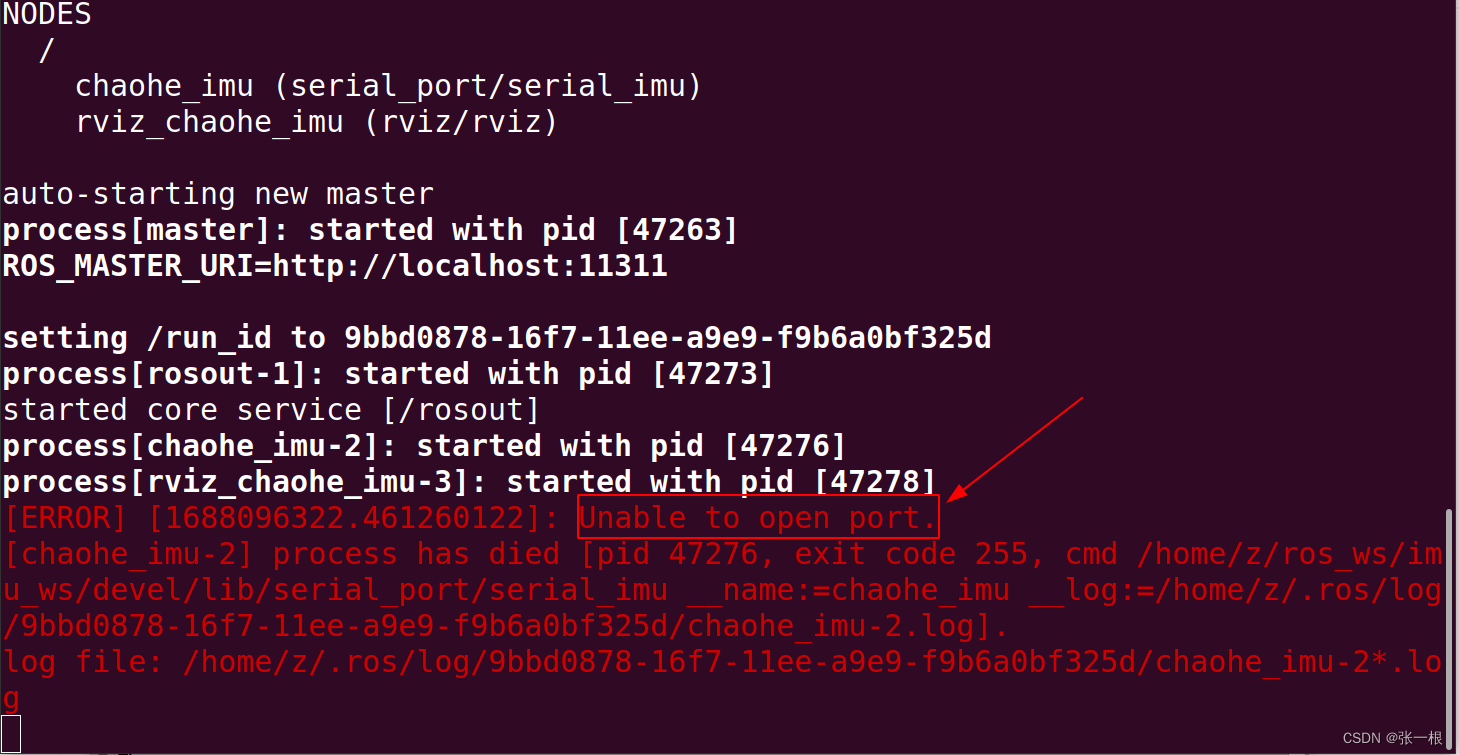
报错说明,要么是IMU没有插到电脑的USB口里,要么是端口的权限不够,我们在连接好的情况下,赋予端口权限即可。
sudo chmod 777 /dev/ttyUSB0
6.配置Rviz
我们成功运行launch文件后,并不能实时显示IMU的数据,还需要简单的配置一下
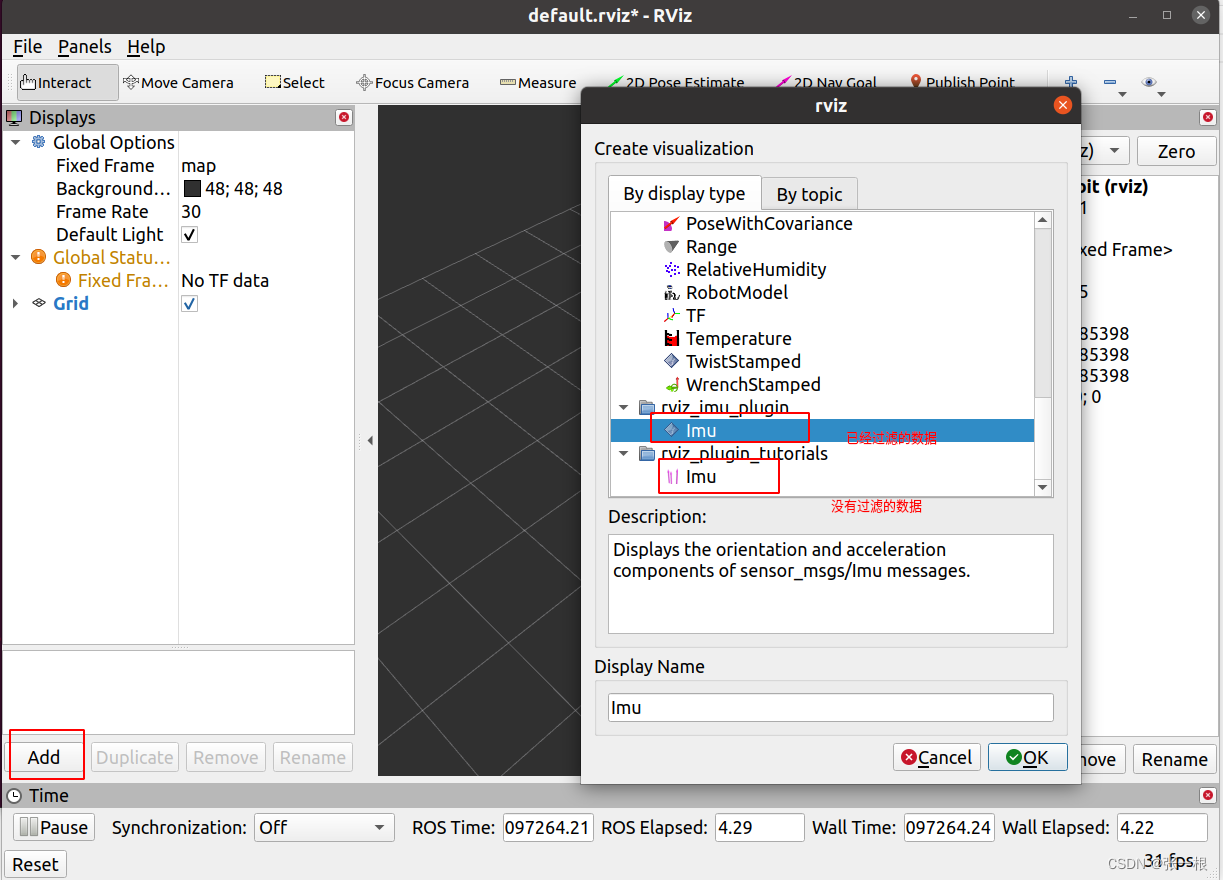
步骤1: 先安装一个RVIZ插件(一会儿需要用到)
sudo apt install ros-noetic-rviz-imu-plugin
步骤2: 添加IMU可视信息
步骤3: 配置坐标和话题数据
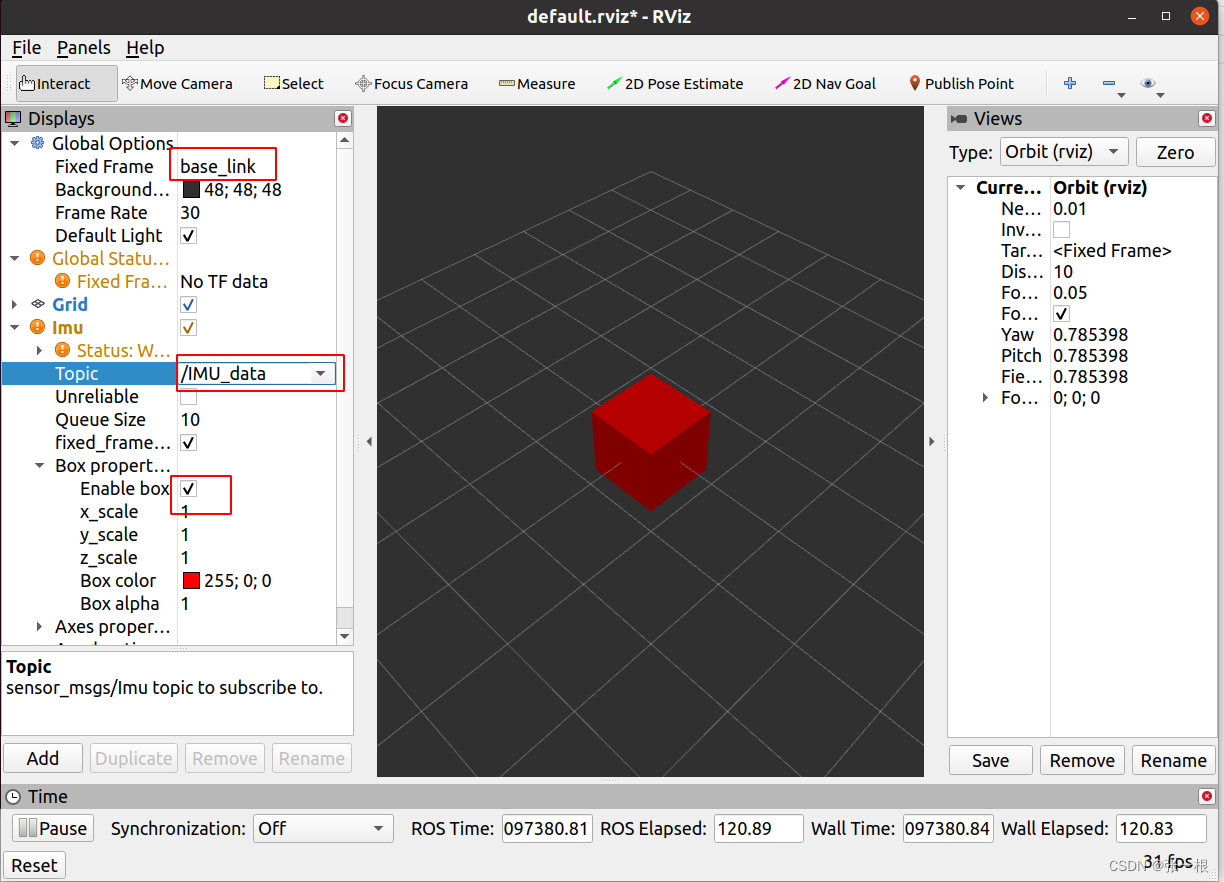
不错意外的话,你手动旋转IMU,在Rviz里也会随之改变。
四.查看IMU的实时数据
1.运行消息包的launch文件
先配置环境路径
source ./devel/setup.bash
运行imu_msg.launch
roslaunch imu_launch imu_msg.launch
不错意外的话,在运行的终端会实时刷新IMU的数据。