✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器
信号处理 图像处理 路径规划 元胞自动机 无人机 电力系统
⛄ 内容介绍
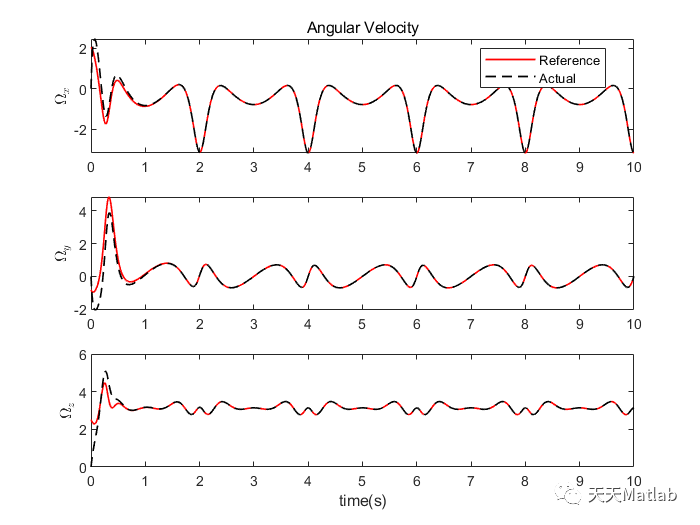
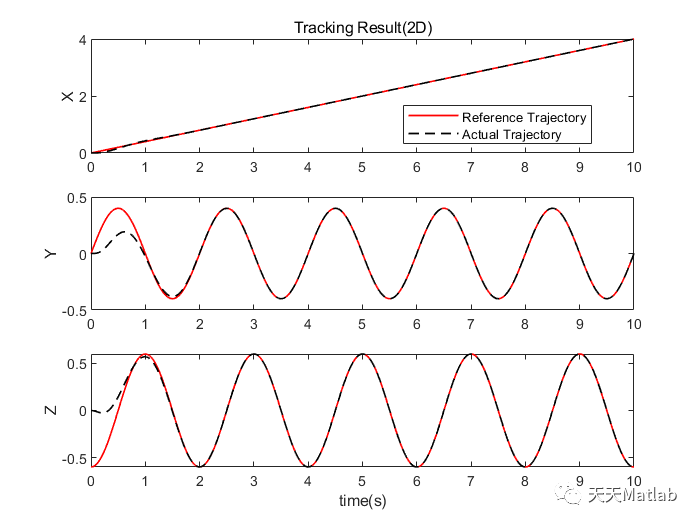
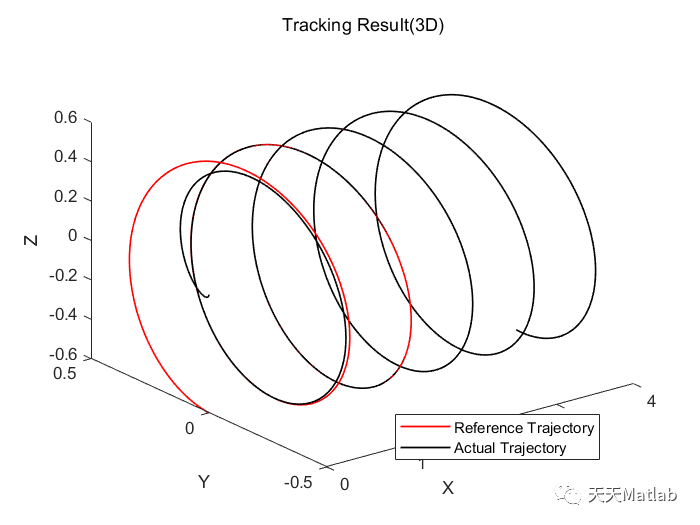
旋翼类无人机相对于固定翼无人机具有能够垂直起降,空中悬停等优点,而四旋翼无人机作为其中一个典型的代表,不仅结构简单还具有良好的带载能力,也易于操控,在军事领域,民用领域,都有着广泛的应用,常见的包括航天拍摄,灾害救援,物资运输等.飞行控制系统是四旋翼飞行器的关键,其中,如何控制飞行器的姿态,是整个飞行控制的核心问题.要保证四旋翼无人机在各种飞行环境下都具有良好的飞行状态,飞行控制算法极为重要.
⛄ 部分代码
function dX = Dynamics(t, X, flag, k, param)
% Split the states
x = X(1:3);
v = X(4:6);
R = reshape(X(7:15), 3, 3);
W = X(16:18);
% Reference trajectory
[Xd, Bd] = reference(t, flag);
% Position control
f = posCtrl(k.x, k.v, param.m, param.g, param.e3, R,...
x, v, Xd);
% Attitude control
[~, ~, ~, M] = mntCtrl(k, param, X, Xd, Bd);
% Equations of motion for UAV
x_dot = v;
v_dot = param.g*param.e3 - f*R*param.e3/param.m;
R_dot = R*hat(W);
W_dot = param.J\(-cross(W, param.J*W) + M);
dX = [x_dot; v_dot; reshape(R_dot, 9, 1); W_dot];
end
⛄ 运行结果
⛄ 参考文献
[1]魏家辉, 姜春波, 陈浩,等. 基于Matlab的四旋翼无人机控制仿真[J]. 数码世界, 2018.
⛄ Matlab代码关注
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料







![[附源码]Python计算机毕业设计SSM基于智能推荐的胖达大码服装定制网(程序+LW)](https://img-blog.csdnimg.cn/9ddf0c5b227b472cbb917900318fdcdd.png)