作为全国普通高校大学生竞赛榜单内竞赛,“中国软件杯”大学生软件设计大赛-智能四足机器狗电力巡检系统开发赛项,目前已吸引了全国2041支队伍参加。经过激烈的目标检测与分割算法打榜赛,最终,有153支团队成功晋级区域赛。在即将于7月中旬开展的区域赛中,晋级选手须基于搭载飞桨框架的国产四足机器狗宇树 Go1 机器狗,在规定的地图上进行自动巡检、避障越障和完成指定任务,根据各任务的完成质量和完成速度获得分数。
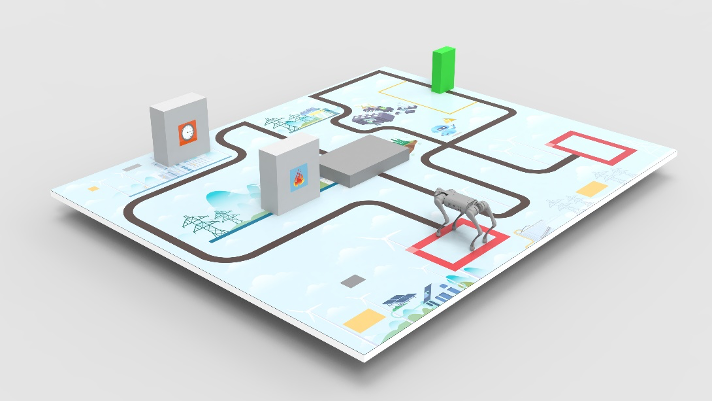
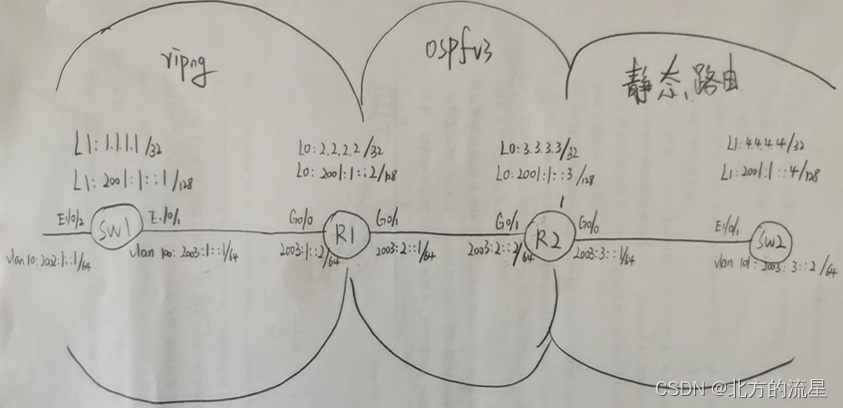
比赛模拟地图

开发者介绍
安泓郡
大连海事大学智能科学与技术专业大三在读,研究方向为机器视觉、智能自主机器人。RoboCup 机器人世界杯中国赛水下作业组全国总冠军;全国大学生 RoboCom 机器人开发者大赛物资运送赛道全国总冠军;中国大学生计算机设计大赛飞桨赛道全国总冠军;全国大学生嵌入式芯片与系统设计竞赛海思赛道全国总冠军。保送至西北工业大学光电与智能研究院攻读博士研究生。
莫善彬
大连海事大学电子信息科学与技术专业,主攻机器视觉以及硬件机器控制方向。广泛涉猎各类大赛,2022届 ROBCOM 物资运送冠军队伍选手,熟悉四足机器狗的控制逻辑及其底层运动控制,有一定的开发经验;在全国大学生电子设计大赛,蓝桥杯等嵌入式硬件开发大赛中屡获佳绩。

预期目标:先看效果
监测到点赞手势时,进行运动跟随
监测到666手势时,小狗跳舞
检测到 STOP 手势时,原地静止跟随

驯化之路一:感知部分实现
感知部分工作目标:使用 mini-HaGRID 数据集,借助 PaddleDetection 工具训练一个可以识别 like、call、stop 三种手势的目标检测模型。

服务器端模型训练
本次使用 HaGRID 手势检测数据集的精简版:mini-HaGRID 作为训练数据。当然也可以使用 Labelme 标注工具自行制作数据集,或寻找网络公开数据集。
使用 Labelme 标注数据集可以参考教程:
https://gitee.com/paddlepaddle/PaddleDetection/blob/release/2.6/docs/tutorials/data/DetAnnoTools.md
在 AI Studio上,基于数据训练深度学习视觉模型。
1.1 数据准备
# 解压数据集
!unzip data/data215595/mini-HaGRID.zip -d data/mini-HaGRID1.2 下载并安装 PaddleDetection v2.4
# 下载PaddleDetection仓库
!git clone https://gitee.com/paddlepaddle/PaddleDetection.git
# 更新pip版本
!pip install --upgrade pip
# 安装其他依赖
%cd PaddleDetection
!pip install -r requirements.txt --user
# 编译安装paddledet
!python setup.py install
%cd ~1.3 新建数据集配置文件
进入 PaddleDetection/configs/datasets 目录,新建文件 voc_hand.yml
以同目录下 voc.yml 为模板,修改数据集根目录,数据集类别数及数据列表文件。可直接复制如下内容:
metric: VOC
map_type: 11point
num_classes: 4
TrainDataset:
!VOCDataSet
dataset_dir: /home/aistudio/data/mini-HaGRID
anno_path: train.txt
label_list: label_list.txt
data_fields: ['image', 'gt_bbox', 'gt_class', 'difficult']
EvalDataset:
!VOCDataSet
dataset_dir: /home/aistudio/data/mini-HaGRID
anno_path: val.txt
label_list: label_list.txt
data_fields: ['image', 'gt_bbox', 'gt_class', 'difficult']
TestDataset:
!ImageFolder
anno_path: /home/aistudio/data/mini-HaGRID/label_list.txt1.4 新建训练配置文件
进入PaddleDetection/configs/picodet目录,新建配置文件picodet_xs_320_voc_hand.yml
以同目录下 picodet_xs_320_coco_lcnet.yml 为模板,修改数据集配置。可直接复制如下内容:
_BASE_: [
'../datasets/voc_hand.yml',
'../runtime.yml',
'_base_/picodet_v2.yml',
'_base_/optimizer_300e.yml',
'_base_/picodet_320_reader.yml',
]
pretrain_weights: https://paddledet.bj.bcebos.com/models/pretrained/LCNet_x0_35_pretrained.pdparams
weights: output/picodet_xs_320_voc_hand/best_model
find_unused_parameters: True
use_ema: true
epoch: 300
snapshot_epoch: 10
LCNet:
scale: 0.35
feature_maps: [3, 4, 5]
LCPAN:
out_channels: 96
PicoHeadV2:
conv_feat:
name: PicoFeat
feat_in: 96
feat_out: 96
num_convs: 2
num_fpn_stride: 4
norm_type: bn
share_cls_reg: True
use_se: True
feat_in_chan: 96
TrainReader:
batch_size: 64
LearningRate:
base_lr: 0.32
schedulers:
- !CosineDecay
max_epochs: 300
- !LinearWarmup
start_factor: 0.1
steps: 3001.5 训练模型
# 安装VisualDL可视化工具
!python -m pip install visualdl -i https://mirror.baidu.com/pypi/simple
# 训练模型
%cd ~/PaddleDetection
!python -u tools/train.py -c configs/picodet/picodet_xs_320_voc_hand.yml --use_vdl=true --vdl_log_dir=vdl_dir/scalar --eval
训练时,可以用VisualDL工具可视化训练参数。
visualdl --logdir vdl_dir/scalar/ --host <host_IP> --port <port_num>
模型导出
使用 PaddleDetection 训练完模型后,需要将模型导出。
2.1 导出为 PaddleInference 格式
# 导出模型
%cd ~/PaddleDetection
!python tools/export_model.py \
-c configs/picodet/picodet_xs_320_voc_hand.yml \
--output_dir=./inference_model -o weights=output/picodet_xs_320_voc_hand/best_model.pdparams2.2 服务器端安装 PaddleLite
打开 PaddleLite 官方 github 仓库:
https://github.com/PaddlePaddle/Paddle-Lite
打开 Release 页面,下载v2.12版本的 opt_linux 至 PaddleDetection 根目录。
可以直接执行如下命令:
%cd ~/PaddleDetection
!wget https://github.com/PaddlePaddle/Paddle-Lite/releases/download/v2.12/opt_linux
# 为opt_linux工具添加运行权限
%cd ~/PaddleDetection
!chmod +x opt_linux2.3 将模型导出为 PaddleLite 格式
%cd ~/PaddleDetection
!mkdir inference_model_opt
!./opt_linux --model_dir=./inference_model/picodet_xs_320_voc_hand --valid_targets=arm --optimize_out_type=naive_buffer --optimize_out=./inference_model_opt/voc_hand其中,opt_linux 工具更加相信的使用说明可以参考
https://www.paddlepaddle.org.cn/lite/v2.12/user_guides/opt/opt_bin.html
运行完成后,可以在 inference_model_opt 文件夹下看到一个文件 “voc_hand.nb”,这就是转换好的 PaddleLite 模型文件。

可视化模型
3.1 下载模型文件
训练完成后,将 inference_model_opt 文件夹下看到一个文件“voc_hand.nb” 下载下来。
打开模型可视化网站:https://netron.app/
将 voc_hand.nb 模型上传。
3.2 记录输入输出名称
模型可视化如图所示:
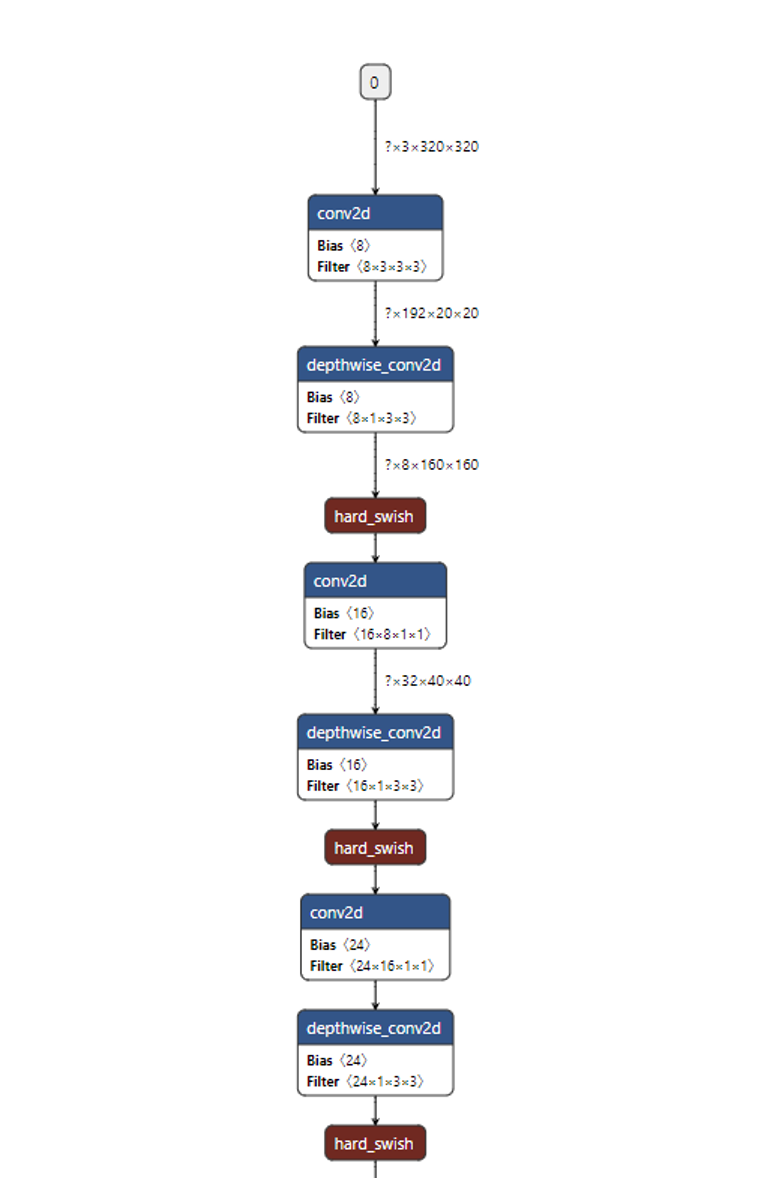
点击输入节点“0”,弹出侧边栏:
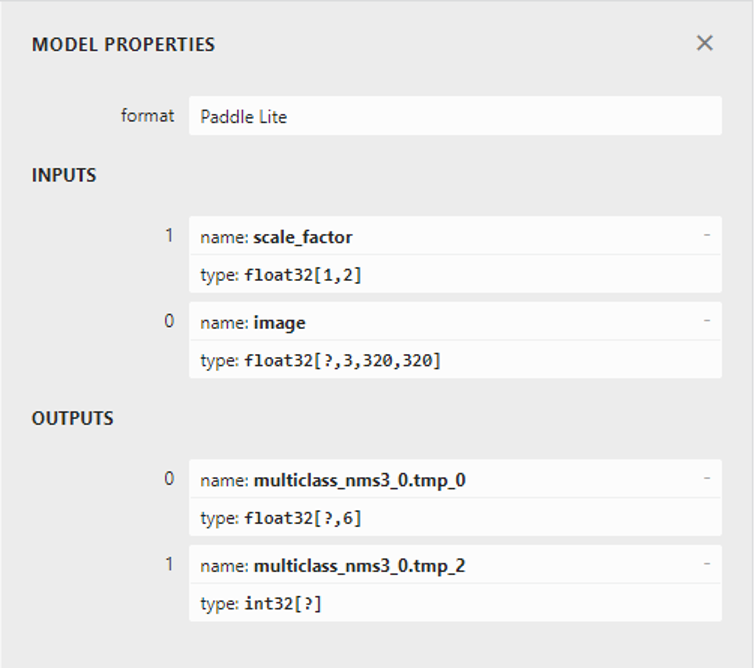
可以看到,模型格式为 PaddleLite,模型有两个输入节点和两个输出节点。
每个节点的含义可以参考:
https://gitee.com/paddlepaddle/PaddleDetection/blob/release/2.6/deploy/EXPORT_MODEL.md
scale_factor:缩放系数
image:输入图像
multiclass_nms3_0.tmp_0:经NMS后的候选结果
multiclass_nms3_0.tmp_2:候选结果的个数
这四个节点的名称要记住,部署的时候需要用。

驯化之路二:硬件部分实现
下面,我们就要讲授如何将训练的 voc_hand 模型部署到宇树 Go1 四足机器人,并用手势控制机器狗完成响应动作。
宇树 Go1 机器狗内置有3块 Nano 和1块树莓派
克隆本项目至机器狗 Nano1 和树莓派 home 目录。
cd ~
git clone https://gitee.com/an_hongjun/2023_paddle_dog_demo.git
cd 2023_paddle_dog_demo
Nano1 部署
进入 nano1-workspace 目录
cd nano1-workspace杀进程
ps -aux | grep point_cloud_node | awk '{print $2}' | xargs kill -9
ps -aux | grep mqttControlNode | awk '{print $2}' | xargs kill -9
ps -aux | grep live_human_pose | awk '{print $2}' | xargs kill -9
ps -aux | grep rosnode | awk '{print $2}' | xargs kill -9修改系统时间
将时间修改为你当前的时间。时间不对可能会影响CMake程序编译。
sudo date -s "2023-6-11 21:23:00"编译程序
./build.sh运行 nano1 节点
./bin/det_hand
树莓派部署
进入 pi-workspace 目录
cd pi-workspace修改系统时间
将时间修改为你当前的时间。时间不对可能会影响 CMake 程序编译。
sudo date -s "2023-6-11 21:23:00"编译程序
./build.sh运行pi节点
./bin/follow
代码解释
Nano1 节点代码解释
https://gitee.com/an_hongjun/2023_paddle_dog_demo/blob/master/nano1-workspace/README.md
Pi 节点代码解释
https://gitee.com/an_hongjun/2023_paddle_dog_demo/blob/master/pi-workspace/README.md

结语:开发者有话说
作为作者,我必须承认:本项目提出的方案并不一定是最佳的。比如:
模型的选型,还有很大的空间;
模型在导出时,模型的压缩也可以做很多文章(或许 PaddleSlim 是个不错的参考);
模型在部署时,代码还有很大的优化空间,以及结合 TensorRT 或许可以进行更加快速的推理。
本项目的目的主要是帮助大家入门。或许它不是最好的,但是个很好的开始。
预祝大家比赛顺利!

关注【飞桨PaddlePaddle】公众号
获取更多技术内容~