PID控制器模拟器
概述:
PID控制器是一种常用的反馈控制算法,用于实现系统输出与期望值之间的精确调节。PID控制器模拟器是一个工具,可以模拟和测试PID控制器的性能,并对系统进行调整和优化。
输入参数:
- setpoint:期望值或目标值
- process_variable:过程变量或实际测量值
- Kp:比例增益系数,用于调整控制器对误差的响应程度
- Ki:积分增益系数,用于修正系统静态误差
- Kd:微分增益系数,用于抑制系统振荡和快速响应
返回值:
- output:PID控制器的输出,用于调整系统的控制信号
工作原理:
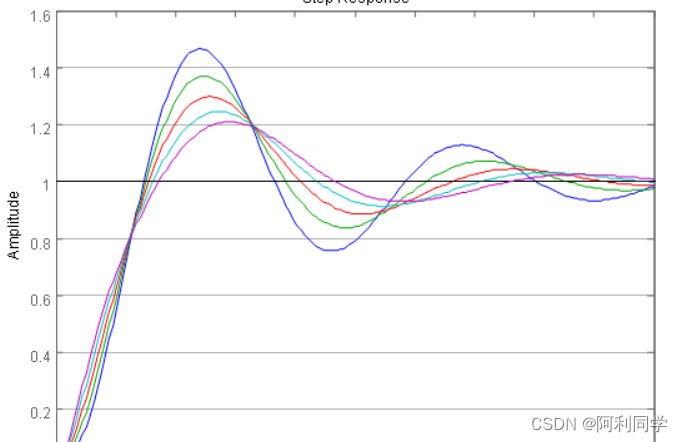
PID控制器根据当前的误差(设定值与实际值之间的差异)计算输出,该输出通过调整系统控制信号来使误差最小化。它综合考虑了比例、积分和微分三个方面的控制行为。
- 比例(Proportional):根据误差的大小进行调节。比例增益系数Kp决定了响应的灵敏度,较大的Kp会导致更快的响应但可能引起系统振荡。
- 积分(Integral):积分增益系数Ki用于修正系统的静态误差,即持续存在的偏差。它通过累积历史误差来调整输出,以减小偏差。
- 微分(Derivati


![[补充]托福口语21天——day2 课堂内容](https://img-blog.csdnimg.cn/9e5d18b5b2854a9b91a7d38655da988a.png)