在笔者上一篇文章《驱动开发:内核层InlineHook挂钩函数》中介绍了通过替换函数头部代码的方式实现Hook挂钩,对于ARK工具来说实现扫描与摘除InlineHook钩子也是最基本的功能,此类功能的实现一般可在应用层进行,而驱动层只需要保留一个读写字节的函数即可,将复杂的流程放在应用层实现是一个非常明智的选择,与《驱动开发:内核实现进程反汇编》中所使用的读写驱动基本一致,本篇文章中的驱动只保留两个功能,控制信号IOCTL_GET_CUR_CODE用于读取函数的前16个字节的内存,信号IOCTL_SET_ORI_CODE则用于设置前16个字节的内存。
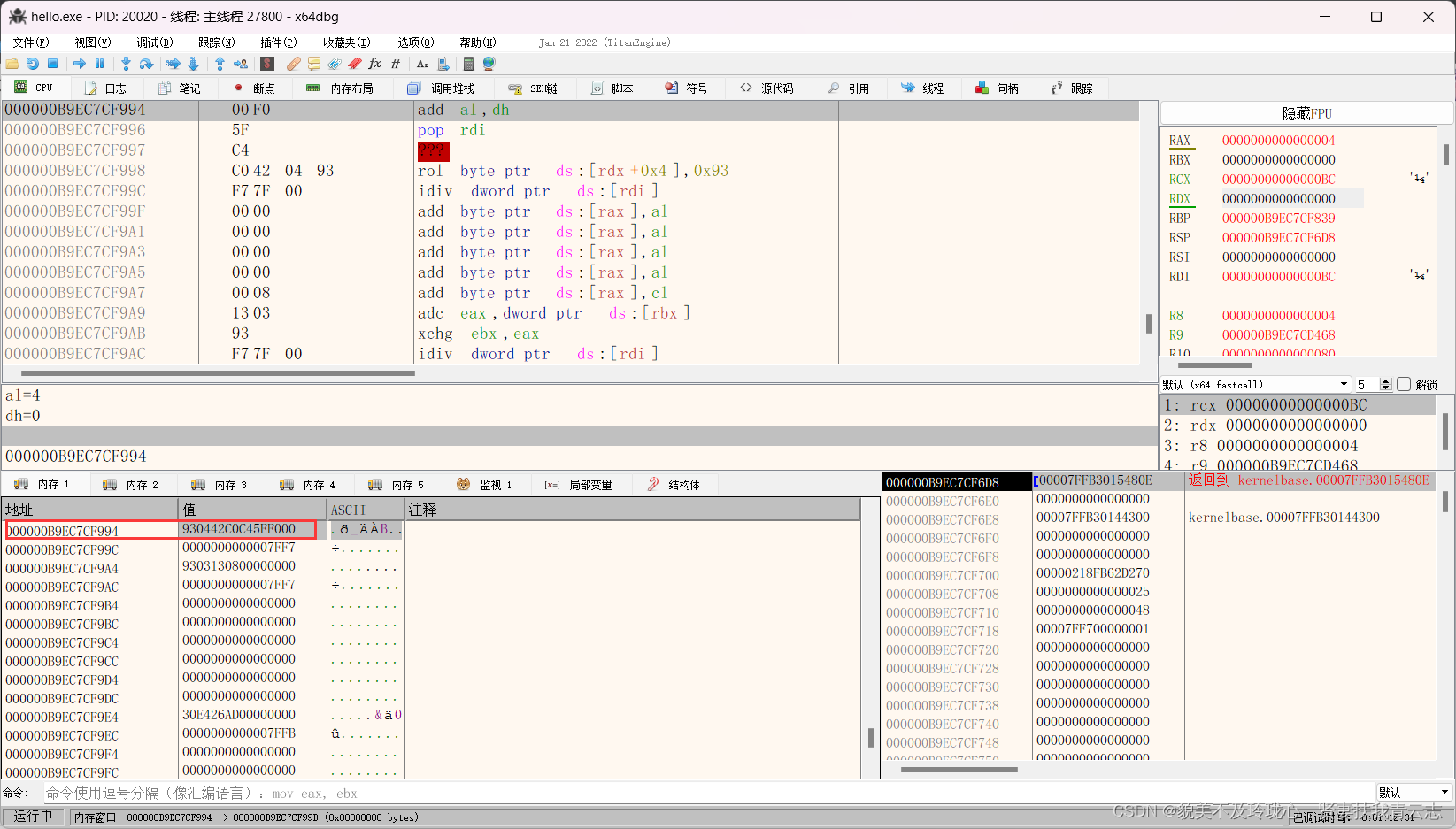
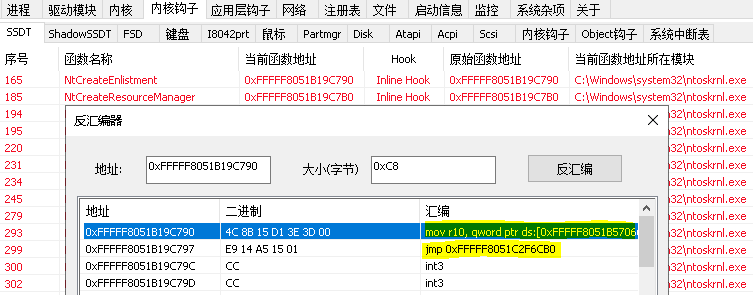
之所以是前16个字节是因为一般的内联Hook只需要使用两条指令就可实现劫持,如下是通用ARK工具扫描到的被挂钩函数的样子。
首先将内核驱动程序代码放到如下,内核驱动程序没有任何特别的,仅仅只是一个通用驱动模板,在其基础上使用CR3读写,如果不理解CR3读写的原理您可以去看《驱动开发:内核CR3切换读写内存》这一篇中的详细介绍。
// 署名权
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
#include <ntifs.h>
#include <intrin.h>
#include <windef.h>
#define DEVICE_NAME L"\\Device\\WinDDK"
#define LINK_NAME L"\\DosDevices\\WinDDK"
#define LINK_GLOBAL_NAME L"\\DosDevices\\Global\\WinDDK"
// 控制信号 IOCTL_GET_CUR_CODE 用于读 | IOCTL_SET_ORI_CODE 用于写
#define IOCTL_GET_CUR_CODE CTL_CODE(FILE_DEVICE_UNKNOWN, 0x800, METHOD_BUFFERED, FILE_ANY_ACCESS)
#define IOCTL_SET_ORI_CODE CTL_CODE(FILE_DEVICE_UNKNOWN, 0x801, METHOD_BUFFERED, FILE_ANY_ACCESS)
// 引用__readcr0等函数必须增加
#pragma intrinsic(_disable)
#pragma intrinsic(_enable)
// 定义读写结构体
typedef struct
{
PVOID Address;
ULONG64 Length;
UCHAR data[256];
} KF_DATA, *PKF_DATA;
KIRQL g_irql;
// 关闭写保护
void WPOFFx64()
{
ULONG64 cr0;
g_irql = KeRaiseIrqlToDpcLevel();
cr0 = __readcr0();
cr0 &= 0xfffffffffffeffff;
__writecr0(cr0);
_disable();
}
// 开启写保护
void WPONx64()
{
ULONG64 cr0;
cr0 = __readcr0();
cr0 |= 0x10000;
_enable();
__writecr0(cr0);
KeLowerIrql(g_irql);
}
// 设备创建时触发
NTSTATUS DispatchCreate(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
pIrp->IoStatus.Status = STATUS_SUCCESS;
pIrp->IoStatus.Information = 0;
DbgPrint("[LyShark] 设备已创建 \n");
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return STATUS_SUCCESS;
}
// 设备关闭时触发
NTSTATUS DispatchClose(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
pIrp->IoStatus.Status = STATUS_SUCCESS;
pIrp->IoStatus.Information = 0;
DbgPrint("[LyShark] 设备已关闭 \n");
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return STATUS_SUCCESS;
}
// 主派遣函数
NTSTATUS DispatchIoctl(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
NTSTATUS status = STATUS_INVALID_DEVICE_REQUEST;
PIO_STACK_LOCATION pIrpStack;
ULONG uIoControlCode;
PVOID pIoBuffer;
ULONG uInSize;
ULONG uOutSize;
// 获取当前设备栈
pIrpStack = IoGetCurrentIrpStackLocation(pIrp);
uIoControlCode = pIrpStack->Parameters.DeviceIoControl.IoControlCode;
// 获取缓冲区
pIoBuffer = pIrp->AssociatedIrp.SystemBuffer;
// 获取缓冲区长度
uInSize = pIrpStack->Parameters.DeviceIoControl.InputBufferLength;
// 输出缓冲区长度
uOutSize = pIrpStack->Parameters.DeviceIoControl.OutputBufferLength;
switch (uIoControlCode)
{
// 读内存
case IOCTL_GET_CUR_CODE:
{
KF_DATA dat = { 0 };
// 将缓冲区格式化为KF_DATA结构体
RtlCopyMemory(&dat, pIoBuffer, 16);
WPOFFx64();
// 将数据写回到缓冲区
RtlCopyMemory(pIoBuffer, dat.Address, dat.Length);
WPONx64();
status = STATUS_SUCCESS;
break;
}
// 写内存
case IOCTL_SET_ORI_CODE:
{
KF_DATA dat = { 0 };
// 将缓冲区格式化为KF_DATA结构体
RtlCopyMemory(&dat, pIoBuffer, sizeof(KF_DATA));
WPOFFx64();
// 将数据写回到缓冲区
RtlCopyMemory(dat.Address, dat.data, dat.Length);
WPONx64();
status = STATUS_SUCCESS;
break;
}
}
if (status == STATUS_SUCCESS)
pIrp->IoStatus.Information = uOutSize;
else
pIrp->IoStatus.Information = 0;
pIrp->IoStatus.Status = status;
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return status;
}
// 驱动卸载
VOID DriverUnload(PDRIVER_OBJECT pDriverObj)
{
UNICODE_STRING strLink;
// 删除符号链接卸载设备
RtlInitUnicodeString(&strLink, LINK_NAME);
IoDeleteSymbolicLink(&strLink);
IoDeleteDevice(pDriverObj->DeviceObject);
}
// 驱动程序入口
NTSTATUS DriverEntry(PDRIVER_OBJECT pDriverObj, PUNICODE_STRING pRegistryString)
{
NTSTATUS status = STATUS_SUCCESS;
UNICODE_STRING ustrLinkName;
UNICODE_STRING ustrDevName;
PDEVICE_OBJECT pDevObj;
// 初始化派遣函数
pDriverObj->MajorFunction[IRP_MJ_CREATE] = DispatchCreate;
pDriverObj->MajorFunction[IRP_MJ_CLOSE] = DispatchClose;
pDriverObj->MajorFunction[IRP_MJ_DEVICE_CONTROL] = DispatchIoctl;
DbgPrint("hello lysahrk.com \n");
// 初始化设备名
RtlInitUnicodeString(&ustrDevName, DEVICE_NAME);
// 创建设备
status = IoCreateDevice(pDriverObj, 0, &ustrDevName, FILE_DEVICE_UNKNOWN, 0, FALSE, &pDevObj);
if (!NT_SUCCESS(status))
{
return status;
}
// 创建符号链接
RtlInitUnicodeString(&ustrLinkName, LINK_NAME);
status = IoCreateSymbolicLink(&ustrLinkName, &ustrDevName);
if (!NT_SUCCESS(status))
{
IoDeleteDevice(pDevObj);
return status;
}
pDriverObj->DriverUnload = DriverUnload;
return STATUS_SUCCESS;
}
接着来分析下应用层做了什么,首先GetKernelBase64函数的作用,该函数内部通过GetProcAddress()函数动态寻找到ZwQuerySystemInformation()函数的内存地址(此函数未被到处所以只能动态找到),找到后调用ZwQuerySystemInformation()直接拿到系统中的所有模块信息,通过pSystemModuleInformation->Module[0].Base得到系统中第一个模块的基地址,此模块就是ntoskrnl.exe,该模块也是系统运行后的第一个启动的,此时我们即可拿到KernelBase也就是系统内存中的基地址。

此时通过LoadLibraryExA()函数动态加载,此时加载的是磁盘中的被Hook函数的所属模块,获得映射地址后将此地址装入hKernel变量内,此时我们拥有了内存中的KernelBase以及磁盘中加载的hKernel,接着调用RepairRelocationTable()让两者的重定位表保持一致。
此时当用户调用GetSystemRoutineAddress()则执行如下流程,想要获取当前内存地址,则需要使用当前内存中的KernelBase模块基址加上通过GetProcAddress()动态获取到的磁盘基址中的函数地址减去磁盘中的基地址,将内存中的KernelBase加上磁盘中的相对偏移就得到了当前内存中加载函数的实际地址。
- address1 = KernelBase + (ULONG64)GetProcAddress(hKernel, “NtWriteFile”) - (ULONG64)hKernel
- address2 = KernelBase - (ULONG64)hKernel + (ULONG64)GetProcAddress(hKernel, “NtWriteFile”)
调用GetOriginalMachineCode()则用于获取相对偏移地址,该地址的获取方式如下,用户传入一个Address当前地址,该地址减去KernelBase内存中的基址,然后再加上hKernel磁盘加载的基址来获取到相对偏移。
- OffsetAddress = Address - KernelBase + hKernel
有了这两条信息那么功能也就实现了,通过GetOriginalMachineCode()得到指定内存地址处原始机器码,通过GetCurrentMachineCode()得到当前内存机器码,两者通过memcmp()函数比对即可知道是否被挂钩了,如果被挂钩则可以通过CR3切换将原始机器码覆盖到特定位置替换即可,这段程序的完整代码如下;
// 署名权
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
#include <stdio.h>
#include <Windows.h>
#pragma comment(lib,"user32.lib")
#pragma comment(lib,"Advapi32.lib")
#ifndef NT_SUCCESS
#define NT_SUCCESS(Status) ((NTSTATUS)(Status) >= 0)
#endif
#define BYTE_ARRAY_LENGTH 16
#define SystemModuleInformation 11
#define STATUS_INFO_LENGTH_MISMATCH ((NTSTATUS)0xC0000004L)
typedef long(__stdcall *ZWQUERYSYSTEMINFORMATION)
(
IN ULONG SystemInformationClass,
IN PVOID SystemInformation,
IN ULONG SystemInformationLength,
IN PULONG ReturnLength OPTIONAL
);
typedef struct
{
ULONG Unknow1;
ULONG Unknow2;
ULONG Unknow3;
ULONG Unknow4;
PVOID Base;
ULONG Size;
ULONG Flags;
USHORT Index;
USHORT NameLength;
USHORT LoadCount;
USHORT ModuleNameOffset;
char ImageName[256];
} SYSTEM_MODULE_INFORMATION_ENTRY, *PSYSTEM_MODULE_INFORMATION_ENTRY;
typedef struct
{
ULONG Count;
SYSTEM_MODULE_INFORMATION_ENTRY Module[1];
} SYSTEM_MODULE_INFORMATION, *PSYSTEM_MODULE_INFORMATION;
typedef struct
{
PVOID Address;
ULONG64 Length;
UCHAR data[256];
} KF_DATA, *PKF_DATA;
HANDLE hDriver = 0;
HMODULE hKernel = 0;
ULONG64 KernelBase = 0;
CHAR NtosFullName[260] = { 0 };
// 生成控制信号
DWORD CTL_CODE_GEN(DWORD lngFunction)
{
return (FILE_DEVICE_UNKNOWN * 65536) | (FILE_ANY_ACCESS * 16384) | (lngFunction * 4) | METHOD_BUFFERED;
}
// 发送控制信号的函数
BOOL IoControl(HANDLE hDrvHandle, DWORD dwIoControlCode, PVOID lpInBuffer, DWORD nInBufferSize, PVOID lpOutBuffer, DWORD nOutBufferSize)
{
DWORD lDrvRetSize;
return DeviceIoControl(hDrvHandle, dwIoControlCode, lpInBuffer, nInBufferSize, lpOutBuffer, nOutBufferSize, &lDrvRetSize, 0);
}
// 动态获取ntdll.dll模块的基地址
ULONG64 GetKernelBase64(PCHAR NtosName)
{
ZWQUERYSYSTEMINFORMATION ZwQuerySystemInformation;
PSYSTEM_MODULE_INFORMATION pSystemModuleInformation;
ULONG NeedSize, BufferSize = 0x5000;
PVOID pBuffer = NULL;
NTSTATUS Result;
// 该函数只能通过动态方式得到地址
ZwQuerySystemInformation = (ZWQUERYSYSTEMINFORMATION)GetProcAddress(GetModuleHandleA("ntdll.dll"), "ZwQuerySystemInformation");
do
{
pBuffer = malloc(BufferSize);
if (pBuffer == NULL) return 0;
// 查询系统中的所有模块信息
Result = ZwQuerySystemInformation(SystemModuleInformation, pBuffer, BufferSize, &NeedSize);
if (Result == STATUS_INFO_LENGTH_MISMATCH)
{
free(pBuffer);
BufferSize *= 2;
}
else if (!NT_SUCCESS(Result))
{
free(pBuffer);
return 0;
}
} while (Result == STATUS_INFO_LENGTH_MISMATCH);
// 取模块信息结构
pSystemModuleInformation = (PSYSTEM_MODULE_INFORMATION)pBuffer;
// 得到模块基地址
ULONG64 ret = (ULONG64)(pSystemModuleInformation->Module[0].Base);
// 拷贝模块名
if (NtosName != NULL)
{
strcpy(NtosName, pSystemModuleInformation->Module[0].ImageName + pSystemModuleInformation->Module[0].ModuleNameOffset);
}
free(pBuffer);
return ret;
}
// 判断并修复重定位表
BOOL RepairRelocationTable(ULONG64 HandleInFile, ULONG64 BaseInKernel)
{
PIMAGE_DOS_HEADER pDosHeader;
PIMAGE_NT_HEADERS64 pNtHeader;
PIMAGE_BASE_RELOCATION pRelocTable;
ULONG i, dwOldProtect;
// 得到DOS头并判断是否符合DOS规范
pDosHeader = (PIMAGE_DOS_HEADER)HandleInFile;
if (pDosHeader->e_magic != IMAGE_DOS_SIGNATURE)
{
return FALSE;
}
// 得到Nt头
pNtHeader = (PIMAGE_NT_HEADERS64)((ULONG64)HandleInFile + pDosHeader->e_lfanew);
// 是否存在重定位表
if (pNtHeader->OptionalHeader.DataDirectory[IMAGE_DIRECTORY_ENTRY_BASERELOC].Size)
{
// 获取到重定位表基地址
pRelocTable = (PIMAGE_BASE_RELOCATION)((ULONG64)HandleInFile + pNtHeader->OptionalHeader.DataDirectory[IMAGE_DIRECTORY_ENTRY_BASERELOC].VirtualAddress);
do
{
// 得到重定位号
ULONG numofReloc = (pRelocTable->SizeOfBlock - sizeof(IMAGE_BASE_RELOCATION)) / 2;
SHORT minioffset = 0;
// 得到重定位数据
PUSHORT pRelocData = (PUSHORT)((ULONG64)pRelocTable + sizeof(IMAGE_BASE_RELOCATION));
// 循环或直接判断*pRelocData是否为0也可以作为结束标记
for (i = 0; i<numofReloc; i++)
{
// 需要重定位的地址
PULONG64 RelocAddress;
// 重定位的高4位是重定位类型,判断重定位类型
if (((*pRelocData) >> 12) == IMAGE_REL_BASED_DIR64)
{
// 计算需要进行重定位的地址
// 重定位数据的低12位再加上本重定位块头的RVA即真正需要重定位的数据的RVA
minioffset = (*pRelocData) & 0xFFF; // 小偏移
// 模块基址+重定位基址+每个数据表示的小偏移量
RelocAddress = (PULONG64)(HandleInFile + pRelocTable->VirtualAddress + minioffset);
// 直接在RING3修改: 原始数据+基址-IMAGE_OPTINAL_HEADER中的基址
VirtualProtect((PVOID)RelocAddress, 4, PAGE_EXECUTE_READWRITE, &dwOldProtect);
// 因为是R3直接LOAD的所以要修改一下内存权限
*RelocAddress = *RelocAddress + BaseInKernel - pNtHeader->OptionalHeader.ImageBase;
VirtualProtect((PVOID)RelocAddress, 4, dwOldProtect, NULL);
}
// 下一个重定位数据
pRelocData++;
}
// 下一个重定位块
pRelocTable = (PIMAGE_BASE_RELOCATION)((ULONG64)pRelocTable + pRelocTable->SizeOfBlock);
} while (pRelocTable->VirtualAddress);
return TRUE;
}
return FALSE;
}
// 初始化
BOOL InitEngine(BOOL IsClear)
{
if (IsClear == TRUE)
{
// 动态获取ntdll.dll模块的基地址
KernelBase = GetKernelBase64(NtosFullName);
printf("模块基址: %llx | 模块名: %s \n", KernelBase, NtosFullName);
if (!KernelBase)
{
return FALSE;
}
// 动态加载模块到内存,并获取到模块句柄
hKernel = LoadLibraryExA(NtosFullName, 0, DONT_RESOLVE_DLL_REFERENCES);
if (!hKernel)
{
return FALSE;
}
// 判断并修复重定位表
if (!RepairRelocationTable((ULONG64)hKernel, KernelBase))
{
return FALSE;
}
return TRUE;
}
else
{
FreeLibrary(hKernel);
return TRUE;
}
}
// 获取原始函数机器码
VOID GetOriginalMachineCode(ULONG64 Address, PUCHAR ba, SIZE_T Length)
{
ULONG64 OffsetAddress = Address - KernelBase + (ULONG64)hKernel;
RtlCopyMemory(ba, (PVOID)OffsetAddress, Length);
}
// 获取传入函数的内存地址
ULONG64 GetSystemRoutineAddress(PCHAR FuncName)
{
return KernelBase + (ULONG64)GetProcAddress(hKernel, FuncName) - (ULONG64)hKernel;
}
// 获取当前函数机器码
VOID GetCurrentMachineCode(ULONG64 Address, PUCHAR ba, SIZE_T Length)
{
ULONG64 dat[2] = { 0 };
dat[0] = Address;
dat[1] = Length;
IoControl(hDriver, CTL_CODE_GEN(0x800), dat, 16, ba, Length);
}
// 清除特定位置的机器码
VOID ClearInlineHook(ULONG64 Address, PUCHAR ba, SIZE_T Length)
{
KF_DATA dat = { 0 };
dat.Address = (PVOID)Address;
dat.Length = Length;
// 直接调用写出控制码
RtlCopyMemory(dat.data, ba, Length);
IoControl(hDriver, CTL_CODE_GEN(0x801), &dat, sizeof(KF_DATA), 0, 0);
}
// 打印数据
VOID PrintBytes(PCHAR DescriptionString, PUCHAR ba, UINT Length)
{
printf("%s", DescriptionString);
for (UINT i = 0; i<Length; i++)
{
printf("%02x ", ba[i]);
}
printf("\n");
}
int main(int argc, char *argv[])
{
UCHAR OriginalMachineCode[BYTE_ARRAY_LENGTH];
UCHAR CurrentMachineCode[BYTE_ARRAY_LENGTH];
ULONG64 Address = 0;
hDriver = CreateFileA("\\\\.\\WinDDK", GENERIC_READ | GENERIC_WRITE, FILE_SHARE_READ, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);
// 初始化
if (!InitEngine(TRUE) || hDriver == 0)
{
return 0;
}
// 需要获取的函数列表
CHAR *FunctionList[128] = { "PsLookupProcessByProcessId", "NtCommitEnlistment", "NtCommitComplete", "NtCommitTransaction" };
for (size_t i = 0; i < 4; i++)
{
// 清空缓存
RtlZeroMemory(OriginalMachineCode, 0, BYTE_ARRAY_LENGTH);
RtlZeroMemory(CurrentMachineCode, 0, BYTE_ARRAY_LENGTH);
// 获取到当前函数地址
Address = GetSystemRoutineAddress(FunctionList[i]);
printf("\n函数地址: %p | 函数名: %s\n", Address, FunctionList[i]);
if (Address == 0 || Address < KernelBase)
{
return 0;
}
GetOriginalMachineCode(Address, OriginalMachineCode, BYTE_ARRAY_LENGTH);
PrintBytes("原始机器码: ", OriginalMachineCode, BYTE_ARRAY_LENGTH);
GetCurrentMachineCode(Address, CurrentMachineCode, BYTE_ARRAY_LENGTH);
PrintBytes("当前机器码: ", CurrentMachineCode, BYTE_ARRAY_LENGTH);
/*
// 不相同则询问是否恢复
if (memcmp(OriginalMachineCode, CurrentMachineCode, BYTE_ARRAY_LENGTH))
{
printf("按下[ENTER]恢复钩子");
getchar();
ClearInlineHook(Address, OriginalMachineCode, BYTE_ARRAY_LENGTH);
}
*/
}
// 注销
InitEngine(FALSE);
system("pause");
return 0;
}
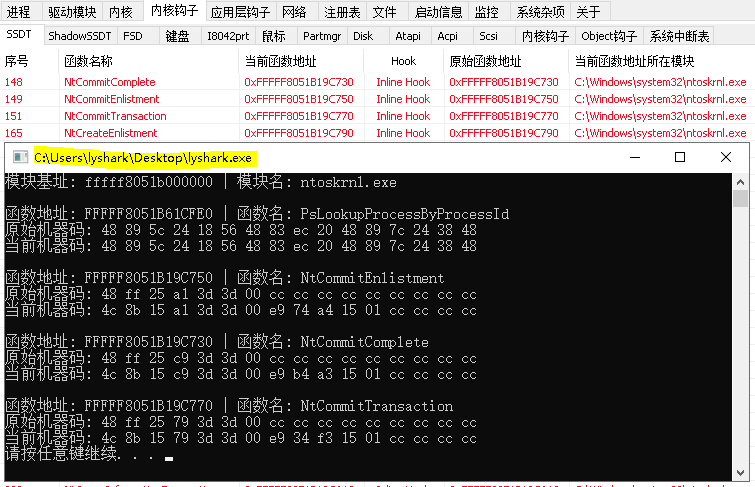
首先编译驱动程序WinDDK.sys并通过KmdManager将驱动程序拉起来,运行客户端lyshark.exe程序会输出当前FunctionList列表中,指定的4个函数的挂钩情况。
参考文献
WIN64内核编程基础 胡文亮