目录
- 一、超声波
- 1、模块介绍
- 2、工作原理
- 二、gettimeofday函数
- 三、树莓派控制超声波测距
一、超声波
1、模块介绍
简介:
超声波传感器模块上面通常有两个超声波元器件,一个用于发射,一个用于接收。

硬件:
电路板上有4个引脚:
VCC(正级)
Trig(触发)
Echo(回应)
GND(接地-负极)
主要参数:
- 工作电压与电流:5V、15mA
- 感测距离:2~400cm
- 感测角度:不大于15°
- 被测物体的面积:不要小于50cm²,且尽量平整
- 具备温度补偿电路
在超声波模块的触发脚位输入10微秒以上的高电位,即可发射超声波,发射超声波之后,与接收到传回的超声波之前,“响应”脚位呈现高电位。因此,程序可以从“响应”脚位的高位脉冲持续时间,换算出被测物的距离。
2、工作原理
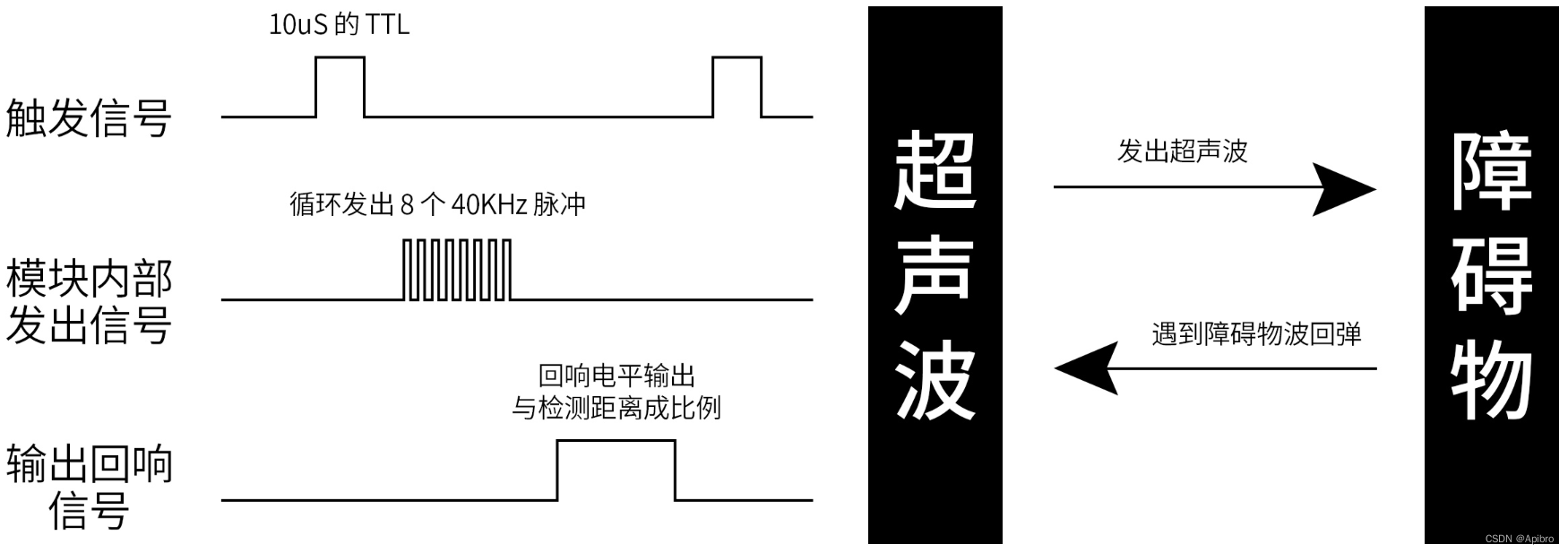
触发信号(Trig):我们从图中可以看出这个引脚有一个持续10微秒的高电平,从而激发T发波
模块内部发出的信号:这个就是Trig所发出的波的具体形状
输出回响信号(Echo):在Trig引脚发波的过程中,Echo一直维持高电平状态,从而得出波在空气中跑的时间
白话来说:
T(发波),R(接受)
先给 Trig 引脚发送一个 10us(微秒)的 TTL(高电平)
T就可以发波了,发出的是循环 8 个 40KHz 的脉冲
波发出去后,Echo 引脚就会一直维持高电平,也就是说波在空中传播的过程是一直维持高电平
那么就可以根据Echo 引脚的高电平维持时间,超声波在空气中的物理性质的传输速度,就可以算出障碍物跟发波点的距离
即超声波能在空气中1秒能跑多远,那么就可以通过Echo 引脚的高电平维持时间,换算距离了
二、gettimeofday函数
作用:
把得到从1970年1月1日0时0分0秒到现在的秒数返回到第一个参数指向的结构体中,第二个参数是关于时区,如果不用,填入NULL,简单的说就是获取时间。
函数原型:
#include <sys/time.h>
int gettimeofday(struct timeval *tv, struct timezone *tz);
int settimeofday(const struct timeval *tv, const struct timezone *tz);
参数介绍:
函数的参数为两个结构体指针
tv:是保存获取时间结果的结构体
tz:用于保存时区结果
- timeval结构体:
struct timeval {
time_t tv_sec; /* seconds */
suseconds_t tv_usec; /* microseconds */
};
- timezone结构体:
struct timezone {
int tz_minuteswest; /* minutes west of Greenwich */
int tz_dsttime; /* type of DST correction */
};
如果不用timezone结构体,若不使用,tz则传入NULL即可。
返回值:
若成功,返回0
若出错,返回-1,错误代码存于errno
三、树莓派控制超声波测距
代码:
#include <wiringPi.h>
#include <stdio.h>
#include <sys/time.h>
#define Trig 4
#define Echo 5
void ultraInit(void)
{
pinMode(Echo, INPUT); //设置端口为输入
pinMode(Trig, OUTPUT); //设置端口为输出
}
float disMeasure(void)
* {
struct timeval tv2;
long start, stop;
float dis;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10); //发出超声波脉冲
digitalWrite(Trig, LOW);
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL); //获取当前时间 开始接收到返回信号的时候
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL); //获取当前时间 最后接收到返回信号的时候
/*
* int gettimeofday(struct timeval *tv, struct timezone *tz);
* */
start = tv1.tv_sec * 1000000 + tv1.tv_usec; //微秒级的时间
stop = tv2.tv_sec * 1000000 + tv2.tv_usec;
dis = (float)(stop - start) / 1000000 * 34000 / 2; //计算时间差求出距离
return dis;
}
int main(void)
{
float dis;
if(wiringPiSetup() == -1){ //如果初始化失败,就输出错误信息 程序初始化时务必进行
printf("setup wiringPi failed !");
return -1;
}
ultraInit();
while(1){
dis = disMeasure();
printf("distance = %0.2f cm\n",dis);
delay(1000);
}
return 0;
}
分析:
1、delayMicroseconds (unsigned int howLong)
将线程暂停指定的微秒数(1000微妙=1毫秒=0.001s),Linux是多线程的,所以实际暂停的秒数可能比设置的更多一些。
2、根据返回的秒数计算出微秒数
startTime = tv1.tv_sec * 1000000 + tv1.tv_usec;
stopTime = tv2.tv_sec * 1000000 + tv2.tv_usec;
前面说到timeval结构体中含有两个成员,tv_sec表示的是秒数,1秒=1 000 000微妙,第二个参数tv_usec表示的就是微秒数,所以通过这两个式子我们就可以求出开始和结束时的微秒数,然后做差即可得到超声波传递所使用的时间。
tv1.tv_sec单位是秒,乘1 000 000表示微秒,再加上后面的微秒数就是超声波的时间。
3、根据时间计算距离
(stopTime - startTime) / 1000000 * 34000 / 2;
因为stopTime和startTime原本表示的微妙,所以做差之后除1 000 000是将单位换算为秒。因为声音是在空气中传播,所以取声音的速度为340m/s=340 00cm/s,因为超声波测距的误差较小的范围为200-300cm,所以这里用cm表示。
结果:
参考:
1、超声波模块笔记
2、gettimeofday函数及超声波测距
最后谢谢阅读,笔者乃小白,如有错误之处还请指正。






![[附源码]Python计算机毕业设计SSM家庭安防系统(程序+LW)](https://img-blog.csdnimg.cn/ea56d1cdaf6240728267497ceb3e4f1c.png)