实验目标:通过电脑调试助手向FPGA的UART串口接收模块发送数据,然后数据可以稳定显示在数码管上。
实验目的: 练习UART串口模块和数码管的使用。之前已经有文章详细讲解了串口和数码管的开发,故这里直接提供设计思路供大家参考。
(串口文章链接)https://mp.csdn.net/mp_blog/creation/editor/128935535https://mp.csdn.net/mp_blog/creation/editor/127933111
(数码管文章链接)https://mp.csdn.net/mp_blog/creation/editor/127933111
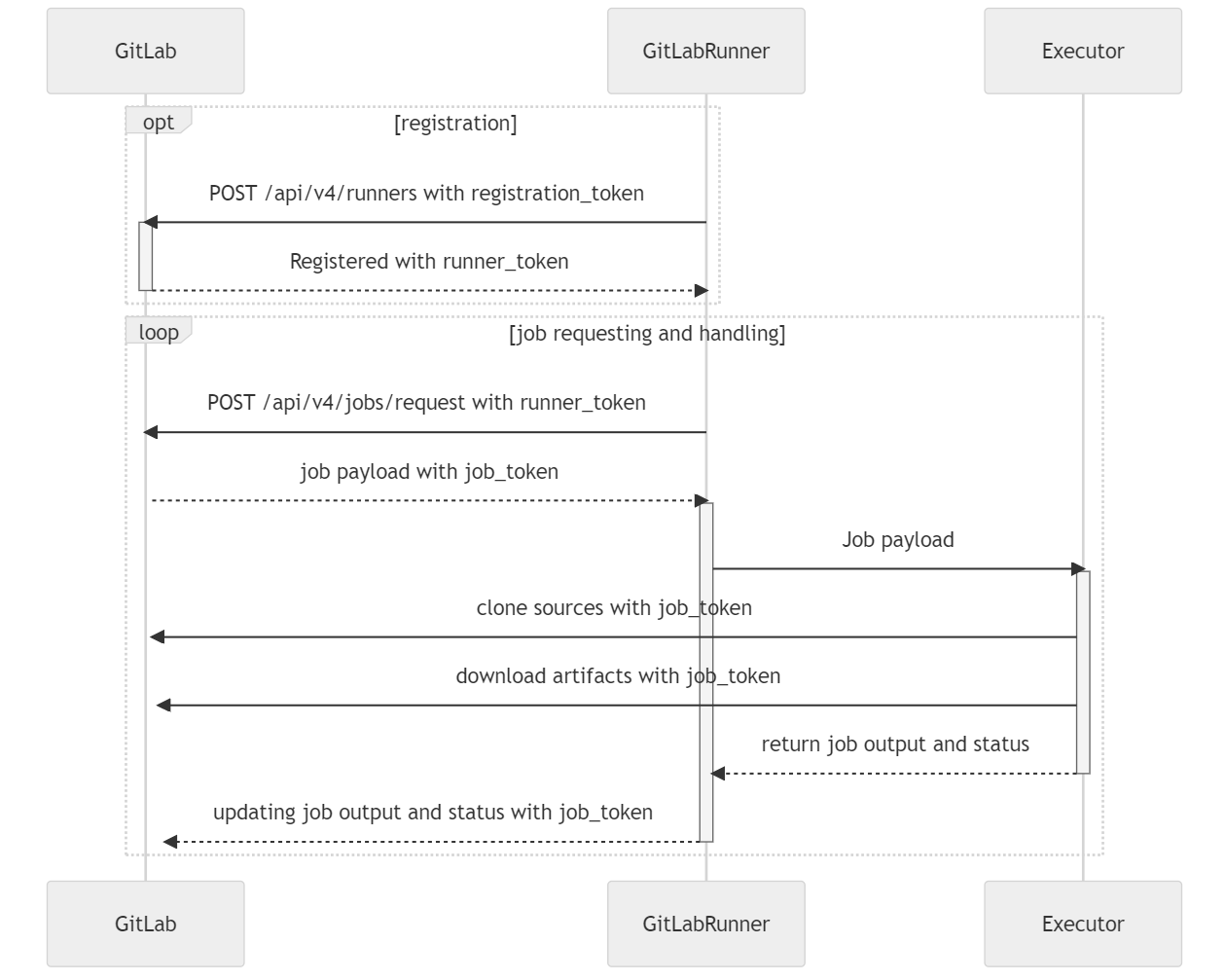
1. 模块框图

2. RTL代码
2.1 顶层模块
`timescale 1ns/1ns
module smg_uart
(
input wire sys_clk ,
input wire sys_rst_n ,
input wire rx ,
output wire [5:0] sel , //数码管位选信号
output wire [7:0] seg //数码管段选信号
);
parameter UART_BPS = 20'd9600 , //波特率
CLK_FREQ = 26'd50_000_000 ;
wire [7:0] data;
uart_rx
#(
.UART_BPS (UART_BPS ), //串口波特率
.CLK_FREQ (CLK_FREQ ) //时钟频率
)
uart_rx_inst
(
.sys_clk (sys_clk ),
.sys_rst_n (sys_rst_n ),
.rx (rx ),
.po_data (data )
);
seg_dynamic seg_dynamic_inst
(
.sys_clk (sys_clk) ,
.data (data ) ,
.sys_rst_n (sys_rst_n) ,
.sel (sel ) ,
.seg (seg )
);
endmodule2.2 UART数据接收模块
`timescale 1ns/1ns
//接收8位串行数据后转并行
module uart_rx
#(
parameter UART_BPS = 'd9600, //9600BPS
CLK_FREQ = 'd50_000_000 //50MHZ
)
(
input wire sys_clk ,
input wire sys_rst_n ,
input wire rx ,
output reg [7:0] po_data
);
localparam BAUD_CNT_MAX = CLK_FREQ/UART_BPS ; //接受1bit数据所需多少个脉冲周期
reg rx_reg1;
reg rx_reg2;
reg rx_reg3;
reg start_nedge;
reg bit_flag;
reg [3:0] bit_cnt;
reg work_en;
reg [15:0] baud_cnt;
reg [7:0] rx_data;
reg rx_flag;
reg po_flag;
reg [7:0] data;
//rx_reg: 进行打拍操作,消除亚稳态
always @(posedge sys_clk or negedge sys_rst_n)
if( !sys_rst_n ) begin
rx_reg1 <= 1'b1;
rx_reg2 <= 1'b1;
rx_reg3 <= 1'b1;
end
else begin
rx_reg1 <= rx;
rx_reg2 <= rx_reg1;
rx_reg3 <= rx_reg2;
end
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
start_nedge <= 1'b0;
else if((~rx_reg2) && (rx_reg3))
start_nedge <= 1'b1;
else
start_nedge <= 1'b0;
//work_en:接收数据工作使能信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
work_en <= 1'b0;
else if(start_nedge == 1'b1)
work_en <= 1'b1;
else if((bit_cnt == 4'd8) && (bit_flag == 1'b1))
work_en <= 1'b0;
//传输一位数据需要花 5208 脉冲周期
always @(posedge sys_clk or negedge sys_rst_n)
if( !sys_rst_n )
baud_cnt <= 1'b0;
else if (baud_cnt == BAUD_CNT_MAX - 1'b1)
baud_cnt <= 1'b0;
else if (work_en == 1'b1)
baud_cnt <= baud_cnt + 1'b1;
else
baud_cnt <= 1'b0;
//bit_flag:接收数据标志
always @(posedge sys_clk or negedge sys_rst_n)
if( !sys_rst_n )
bit_flag <= 1'b0;
else if (( baud_cnt == (BAUD_CNT_MAX/2) - 1 ))
bit_flag <= 1'b1;
else
bit_flag <= 1'b0;
always @(posedge sys_clk or negedge sys_rst_n)
if( !sys_rst_n )
bit_cnt <= 1'b0;
else if ((bit_flag == 1'b1) && (bit_cnt < 4'd8))
bit_cnt <= bit_cnt + 1'b1;
else if ((bit_flag == 1'b1) && (bit_cnt == 4'd8))
bit_cnt <= 1'b0;
always @(posedge sys_clk or negedge sys_rst_n)
if( !sys_rst_n )
rx_data <= 1'b0;
else if ((bit_cnt >= 4'd1)&&(bit_cnt <= 4'd8)&&(bit_flag == 1'b1))
rx_data <= {rx_reg3, rx_data[7:1]};
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
rx_flag <= 1'b0;
else if((bit_cnt == 4'd8) && (bit_flag == 1'b1))
rx_flag <= 1'b1;
else
rx_flag <= 1'b0;
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
po_flag <= 1'b0;
else if (rx_flag == 1'b1)
po_flag <= 1'b1;
else
po_flag <= 1'b0;
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
po_data <= 1'b0;
else if (rx_flag == 1'b1)
po_data <= rx_data;
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
data <= 1'b0;
else if (po_flag == 1'b1)
data <= po_data;
endmodule2.3 数码管显示模块
/* Author: xsy
Create Date: 20221118
Description: 数码管驱动模块
method: / */
`timescale 1ns/1ns
module seg_dynamic
#(
parameter CNT_MAX = 16'd49_999 //数码管 刷新 时间计数最大值 1ms
)
(
input wire sys_clk ,
input wire sys_rst_n ,
input wire [7:0] data , //数码管要显示的值
output reg [5:0] sel , //数码管位选信号
output reg [7:0] seg //数码管段选信号
);
//wire define
wire [3:0] unit ; //个位数
wire [3:0] ten ; //十位数
wire [3:0] hun ; //百位数
wire [3:0] tho ; //千位数
wire [3:0] t_tho ; //万位数
wire [3:0] h_hun ; //十万位数
//reg define
reg [23:0] data_reg ; //待显示数据 寄存器
reg [15:0] cnt_1ms ; //1ms计数器
reg flag_1ms ; //1ms标志信号
reg [2:0] cnt_sel ; //数码管位选计数器
reg [5:0] sel_reg ; //位选信号
reg [3:0] data_disp ; //当前数码管显示的数据
//cnt_1ms:1ms计数器
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_1ms <= 16'd0;
else if(cnt_1ms == CNT_MAX)
cnt_1ms <= 16'd0;
else
cnt_1ms <= cnt_1ms + 1'b1;
//flag_1ms:1ms标志信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
flag_1ms <= 1'b0;
else if(cnt_1ms == CNT_MAX - 1'b1)
flag_1ms <= 1'b1; // unit 为BCD码,可以总效果4'bXXXX
else // ten 为BCD码,可以总效果4'bXXXX
flag_1ms <= 1'b0; // hun 为BCD码,可以总效果4'bXXXX
// tho 为BCD码,可以总效果4'bXXXX
//data_reg:控制数码管显示数据 // t_tho 为BCD码,可以总效果4'bXXXX
always@(posedge sys_clk or negedge sys_rst_n) // h_hun 为BCD码,可以总效果4'bXXXX
if(sys_rst_n == 1'b0)
data_reg <= 24'b0;
//若显示的十进制数的 十万 位为非零数据则六个数码管全显示
else if(h_hun) //h_hun非空即数据有六位
data_reg <= {h_hun,t_tho,tho,hun,ten,unit};
//若显示的十进制数的 万 位为非零数据则值显示在5个数码管上
else if(t_tho)
data_reg <= {4'd11,t_tho,tho,hun,ten,unit}; //4'd11(第六位)我们定义为不显示
//若显示的十进制数的 千 位为非零数据则值显示4个数码管
else if(tho)
data_reg <= {4'd11,4'd11,tho,hun,ten,unit};
//若显示的十进制数的 百 位为非零数据则值显示3个数码管
else if(hun)
data_reg <= {4'd11,4'd11,4'd11,hun,ten,unit};
//若显示的十进制数的 十 位为非零数据则值显示2个数码管
else if(ten)
data_reg <= {4'd11,4'd11,4'd11,4'd11,ten,unit};
//若上面都不满足都只显示 个 位数码管
else
data_reg <= {4'd11,4'd11,4'd11,4'd11,4'd11,unit};
//cnt_sel:标记0-5ms所对应显示的BCD码
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_sel <= 3'd0;
else if((cnt_sel == 3'd5) && (flag_1ms == 1'b1))
cnt_sel <= 3'd0;
else if(flag_1ms == 1'b1)
cnt_sel <= cnt_sel + 1'b1;
else
cnt_sel <= cnt_sel;
//数码管位选信号寄存器
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
sel_reg <= 6'b000_000;
else if((cnt_sel == 3'd0) && (flag_1ms == 1'b1))
sel_reg <= 6'b000_001;
else if(flag_1ms == 1'b1)
sel_reg <= sel_reg << 1;
else
sel_reg <= sel_reg;
//控制数码管的位选信号,使六个数码管轮流显示
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
data_disp <= 4'b0;
else if(flag_1ms == 1'b1)
case(cnt_sel)
3'd0: data_disp <= data_reg[3:0] ; //给第1个数码管赋个位值
3'd1: data_disp <= data_reg[7:4] ; //给第2个数码管赋十位值
3'd2: data_disp <= data_reg[11:8] ; //给第3个数码管赋百位值
3'd3: data_disp <= data_reg[15:12]; //给第4个数码管赋千位值
3'd4: data_disp <= data_reg[19:16]; //给第5个数码管赋万位值
3'd5: data_disp <= data_reg[23:20]; //给第6个数码管赋十万位值
default:data_disp <= 4'b0 ;
endcase
else
data_disp <= data_disp;
//控制数码管段选信号,显示数字
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
seg <= 8'b1111_1111;
else
case(data_disp)
4'd0 : seg <= 8'b1100_0000; //显示数字0
4'd1 : seg <= 8'b1111_1001; //显示数字1
4'd2 : seg <= 8'b1010_0100; //显示数字2
4'd3 : seg <= 8'b1011_0000; //显示数字3
4'd4 : seg <= 8'b1001_1001; //显示数字4
4'd5 : seg <= 8'b1001_0010; //显示数字5
4'd6 : seg <= 8'b1000_0010; //显示数字6
4'd7 : seg <= 8'b1111_1000; //显示数字7
4'd8 : seg <= 8'b1000_0000; //显示数字8
4'd9 : seg <= 8'b1001_0000; //显示数字9
default:seg <= 8'b1111_1111;
endcase
//sel:数码管位选信号赋值
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
sel <= 6'b000_000;
else
sel <= sel_reg;
bcd_8421 bcd_8421_inst
(
.sys_clk (sys_clk ), //系统时钟,频率50MHz
.sys_rst_n (sys_rst_n), //复位信号,低电平有效
.data (data ), //输入需要转换的数据
.unit (unit ), //个位BCD码
.ten (ten ), //十位BCD码
.hun (hun ), //百位BCD码
.tho (tho ), //千位BCD码
.t_tho (t_tho ), //万位BCD码
.h_hun (h_hun ) //十万位BCD码
);
endmodule2.4 二进制转BCD码模块
`timescale 1ns/1ns
module bcd_8421
(
input wire sys_clk ,
input wire sys_rst_n ,
input wire [19:0] data , //输入需要转换的数据
output reg [3:0] unit , //个位BCD码
output reg [3:0] ten , //十位BCD码
output reg [3:0] hun , //百位BCD码
output reg [3:0] tho , //千位BCD码
output reg [3:0] t_tho , //万位BCD码
output reg [3:0] h_hun //十万位BCD码
);
reg [4:0] cnt_shift ;//移位判断计数器 移动次数由十转为二进制的位数决定
reg [43:0] data_shift ;//移位判断数据 寄存器 存放BCD码与二进制码
reg shift_flag ;//移位判断标志信号 用于控制移位判断的先后顺序
//cnt_shift:从0到21循环计数(当计为20时进行判断移位,21时则是取BCD码数据)
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_shift <= 5'd0;
else if((cnt_shift == 5'd21) && (shift_flag == 1'b1))
cnt_shift <= 5'd0;
else if(shift_flag == 1'b1)
cnt_shift <= cnt_shift + 1'b1;
else
cnt_shift <= cnt_shift;
//data_shift:计数器为0时赋初值,计数器为1~20时进行移位判断操作
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
data_shift <= 44'b0;
else if(cnt_shift == 5'd0) //计数器为0时赋初值
data_shift <= {24'b0,data};
else if((cnt_shift <= 20)&&(shift_flag == 1'b0))//<=为小于等于,先判断再移位
begin
data_shift[23:20] <= (data_shift[23:20] > 4) ?
(data_shift[23:20] + 2'd3) : (data_shift[23:20]);
data_shift[27:24] <= (data_shift[27:24] > 4) ?
(data_shift[27:24] + 2'd3) : (data_shift[27:24]);
data_shift[31:28] <= (data_shift[31:28] > 4) ?
(data_shift[31:28] + 2'd3) : (data_shift[31:28]);
data_shift[35:32] <= (data_shift[35:32] > 4) ?
(data_shift[35:32] + 2'd3) : (data_shift[35:32]);
data_shift[39:36] <= (data_shift[39:36] > 4) ?
(data_shift[39:36] + 2'd3) : (data_shift[39:36]);
data_shift[43:40] <= (data_shift[43:40] > 4) ?
(data_shift[43:40] + 2'd3) : (data_shift[43:40]);
end
else if((cnt_shift <= 20) && (shift_flag == 1'b1))
data_shift <= data_shift << 1;
else
data_shift <= data_shift;
//shift_flag:移位判断标志信号,低电平判断 高电平移位
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
shift_flag <= 1'b0;
else
shift_flag <= ~shift_flag;
//当计数器等于20时,移位判断操作完成,对各个位数的BCD码进行赋值
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
begin
unit <= 4'b0;
ten <= 4'b0;
hun <= 4'b0;
tho <= 4'b0;
t_tho <= 4'b0;
h_hun <= 4'b0;
end
else if(cnt_shift == 5'd21)
begin
unit <= data_shift[23:20];
ten <= data_shift[27:24];
hun <= data_shift[31:28];
tho <= data_shift[35:32];
t_tho <= data_shift[39:36];
h_hun <= data_shift[43:40];
end
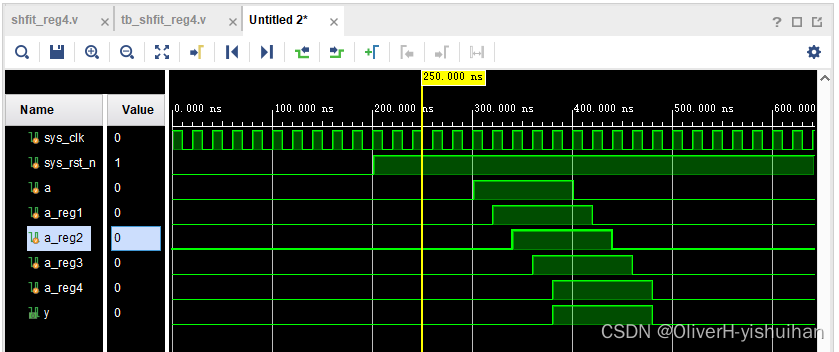
endmodule3. 上板验证
调试助手发送十六进制数 34,数码管显示 52;调试助手发送十六进制数 88,数码管显示 136;


说明:
本人学习的是野火家Xilinx Spartan6系列开发板及配套教程,以上内容如有疑惑或错误欢迎评论区指出。
开发软件:ise14.7 仿真:modelsim 10.5
如需上述资料私信或留下邮箱。