目录
- Transoformation(变换)
- Why stuty transformation(为什么要学习变换呢?)
- 2D transformations(2D变换)
- Scale transformation(缩放变换)
- Reflection Matrix(反射矩阵)
- Shear Matrix(切变矩阵)
- Rotate transformation(旋转变换)
- Linear Transforms = Matrices(线性变换 = 矩阵)
- Homogeneous coordinates(齐次坐标)
- Translation(平移) 引入齐次坐标
- Solution: Homogenous Coordinates(解决方法:齐次坐标)
- Affine Transformations(仿射变换)
- Inverse Transform(逆变换)
- Composing Transforms(组合变换)
- Decomposing Complex Transforms(分解复杂的变换)
- 3D Transforms(三维的变换)
- 参考资源
Transoformation(变换)
Why stuty transformation(为什么要学习变换呢?)
2D transformations(2D变换)
Scale transformation(缩放变换)
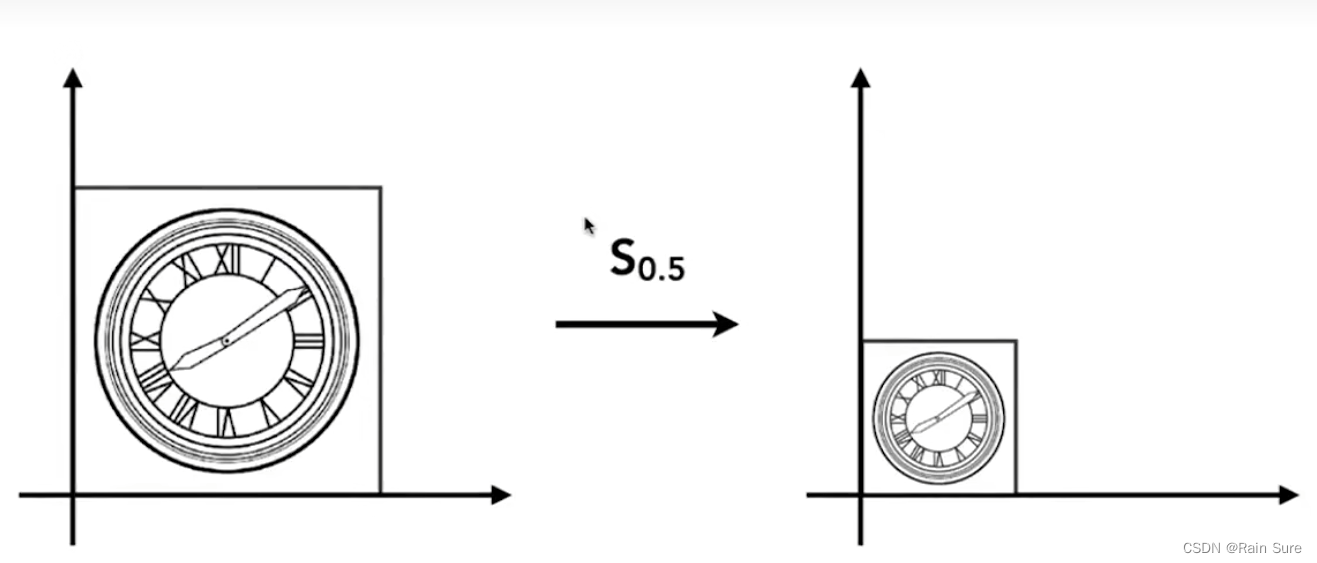
写成数学形式:
x
′
=
s
x
x' = sx
x′=sx
y
′
=
s
y
y' = sy
y′=sy
在这里,
s
=
0.5
s = 0.5
s=0.5。
写成矩阵形式,结果如下:
[
x
′
y
′
]
=
[
s
0
0
s
]
[
x
y
]
\left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right]=\left[\begin{array}{ll} s & 0 \\ 0 & s \end{array}\right]\left[\begin{array}{l} x \\ y \end{array}\right]
[x′y′]=[s00s][xy]
在这里,我们称矩阵
[
s
0
0
s
]
\left[\begin{array}{ll} s & 0 \\ 0 & s \end{array}\right]
[s00s]为缩放矩阵。
如果缩放不是均匀的:
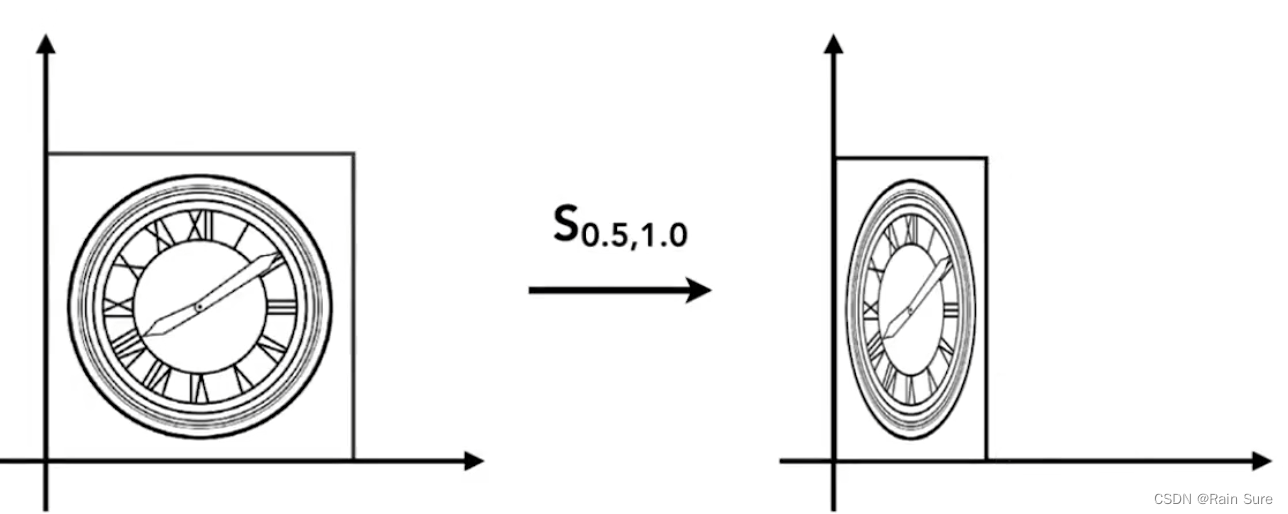
此时变换可以写成如下形式:
[
x
′
y
′
]
=
[
s
x
0
0
s
y
]
[
x
y
]
\left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right]=\left[\begin{array}{ll} s_{x} & 0 \\ 0 & s_{y} \end{array}\right]\left[\begin{array}{l} x \\ y \end{array}\right]
[x′y′]=[sx00sy][xy]
缩放矩阵: [ s x 0 0 s y ] \left[\begin{array}{ll} s_{x} & 0 \\ 0 & s_{y} \end{array}\right] [sx00sy]
Reflection Matrix(反射矩阵)
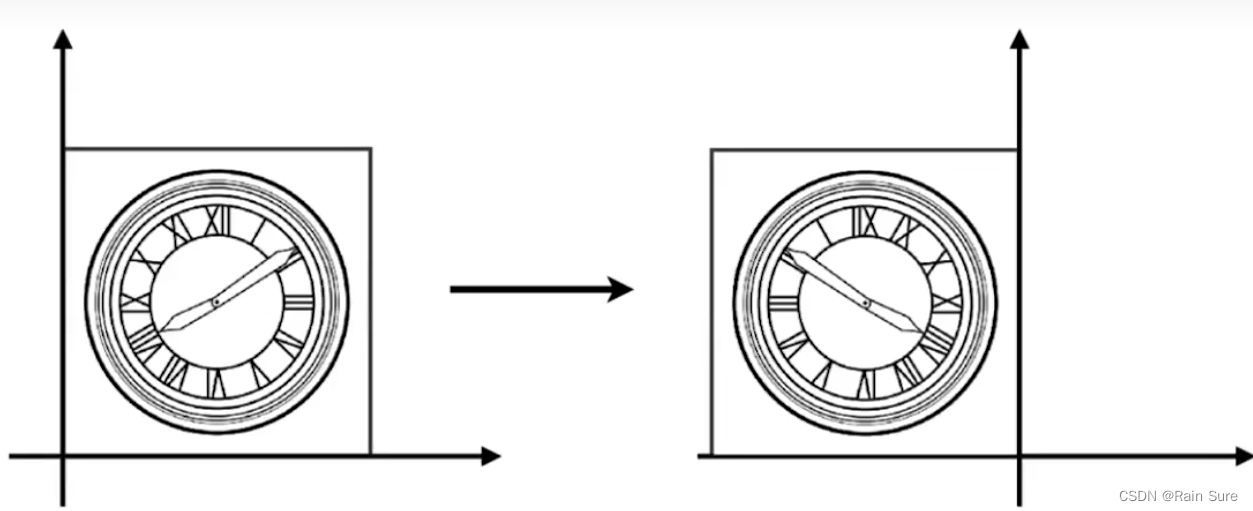
坐标变换
x
′
=
−
x
,
y
′
=
y
x^{\prime} = -x, y^{\prime} = y
x′=−x,y′=y
Shear Matrix(切变矩阵)
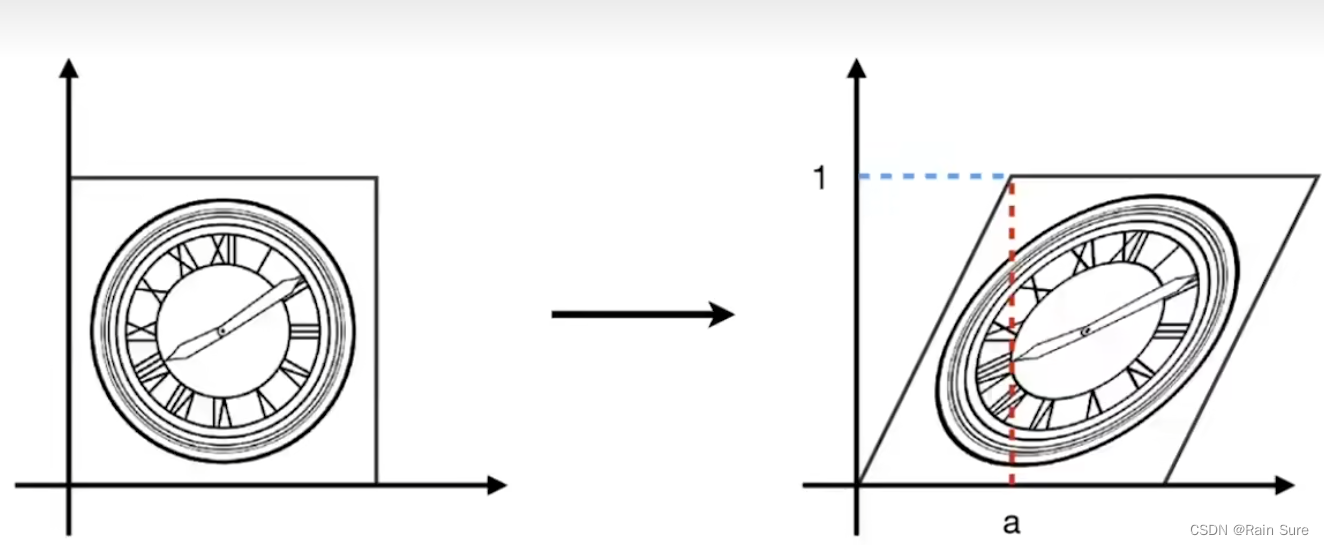
提示:
- 竖直方向上的位移始终为 0 0 0;
- 当 y = 0 y = 0 y=0时,水平方向的位移为 0 0 0;
- 当 y = 1 y = 1 y=1时,水平方向位移是 a a a;
变换方程为: [ x ′ y ′ ] = [ 1 a 0 1 ] [ x y ] \left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right]=\left[\begin{array}{ll} 1 & a \\ 0 & 1 \end{array}\right]\left[\begin{array}{l} x \\ y \end{array}\right] [x′y′]=[10a1][xy]
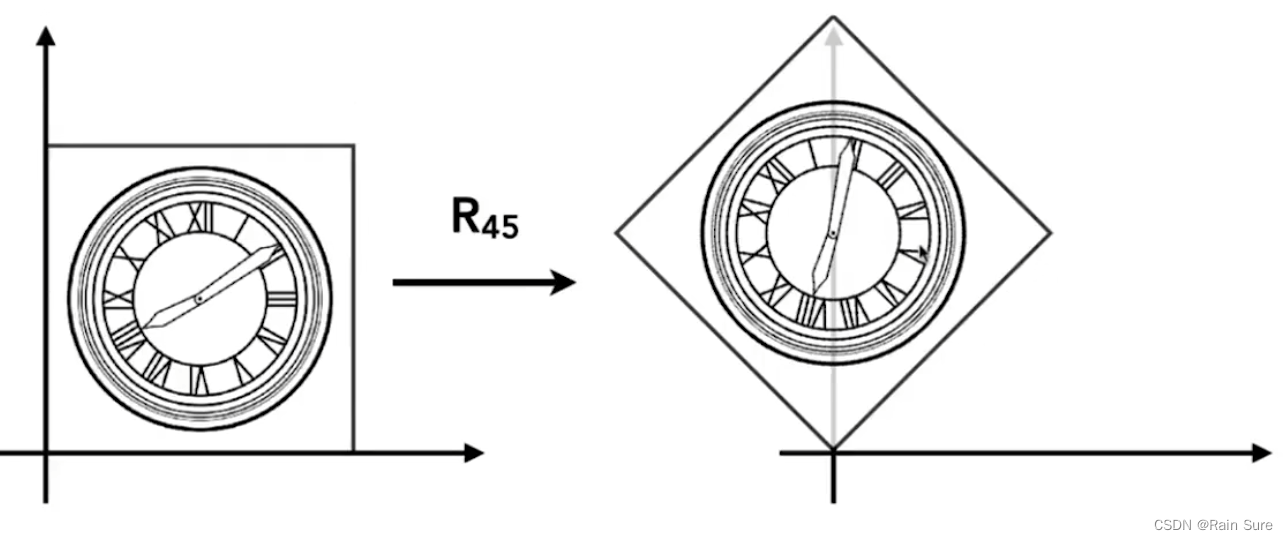
Rotate transformation(旋转变换)
默认是绕着原点
(
0
,
0
)
(0, 0)
(0,0),逆时针旋转。
逆时针旋转角度
θ
\theta
θ的旋转矩阵如下:
R
θ
=
[
c
o
s
θ
−
s
i
n
θ
s
i
n
θ
c
o
s
θ
]
R_{\theta} = \left[\begin{array}{ll} cos{\theta} & -sin{\theta} \\ sin{\theta} & cos{\theta} \end{array}\right]
Rθ=[cosθsinθ−sinθcosθ]
Linear Transforms = Matrices(线性变换 = 矩阵)
通过上面几个变换的例子,我们发现无论哪种变换,我们均可以写成矩阵的形式,因为它们都是线性变换:
x
′
=
a
x
+
b
y
x^{\prime} = ax + by
x′=ax+by
y
′
=
c
x
+
d
y
y^{\prime} = cx + dy
y′=cx+dy
变换方程如下:
[ x ′ y ′ ] = [ a b c d ] [ x y ] \left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right]=\left[\begin{array}{ll} a & b \\ c & d \end{array}\right]\left[\begin{array}{l} x \\ y \end{array}\right] [x′y′]=[acbd][xy]
Homogeneous coordinates(齐次坐标)
Translation(平移) 引入齐次坐标
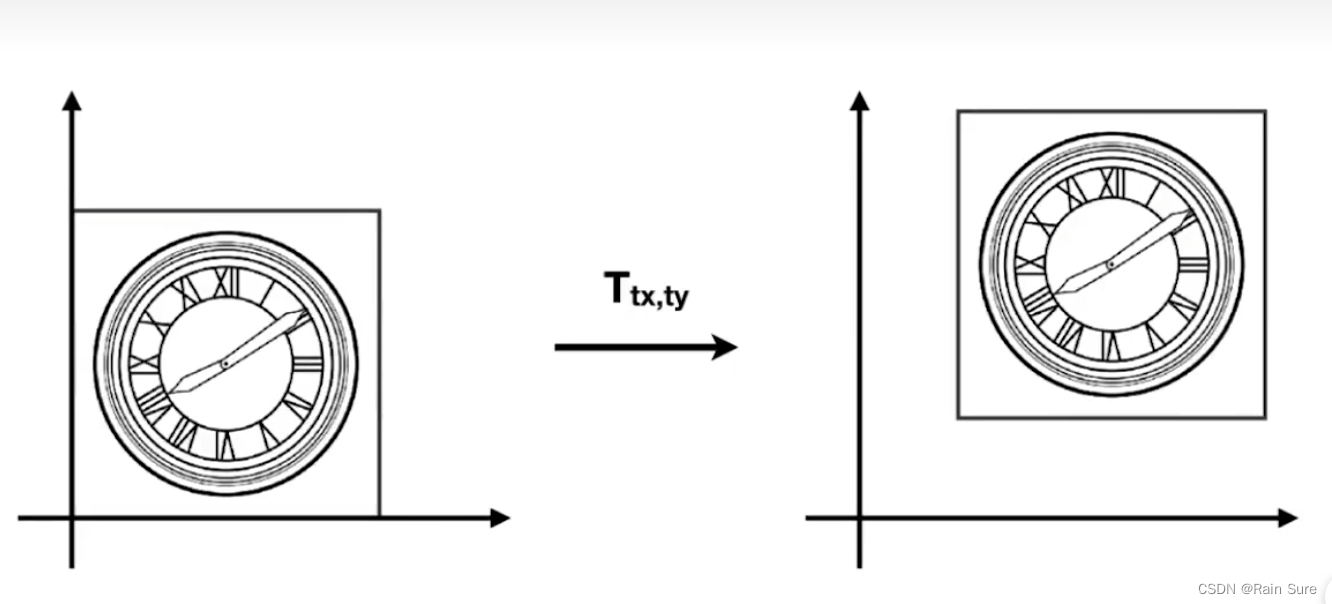
平移变换就不好写成两个矩阵相乘的形式,只能写成下面的形式:
[
x
′
y
′
]
=
[
a
b
c
d
]
[
x
y
]
+
[
t
x
t
y
]
\left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right]=\left[\begin{array}{ll} a & b \\ c & d \end{array}\right]\left[\begin{array}{l} x \\ y \end{array}\right] + \left[\begin{array}{l} t_{x} \\ t_{y} \end{array}\right]
[x′y′]=[acbd][xy]+[txty]
因为,平移操作并不属于线性变换。
但是,我们并不希望将平移当作一种特殊的情况考虑。
有没有一种特殊方式来表示全部变换呢?
Solution: Homogenous Coordinates(解决方法:齐次坐标)
添加一个新的维度:
- 2D point = ( x , y , 1 ) T (x, y, 1)^{T} (x,y,1)T
- 2D vector = ( x , y , 0 ) T (x, y, 0)^{T} (x,y,0)T
现在使用矩阵来表示平移变换,变换方程如下:
[
x
′
y
′
w
′
]
=
[
1
0
t
x
0
1
t
y
0
0
1
]
[
x
y
1
]
=
[
x
+
t
x
y
+
t
y
1
]
\left[\begin{array}{l} x^{\prime} \\ y^{\prime} \\ w^{\prime} \end{array}\right]=\left[\begin{array}{ll} 1 & 0 & t_{x} \\ 0 & 1 & t_{y} \\ 0 & 0 & 1 \end{array}\right]\left[\begin{array}{l} x \\ y \\ 1 \end{array}\right]=\left[\begin{array}{l} x + t_{x} \\ y + t_{y} \\ 1 \end{array}\right]
x′y′w′
=
100010txty1
xy1
=
x+txy+ty1
向量具有平移不变性,这就是为什么向量的第三维是 0 0 0,可以有效地保证其在平移时保持不变。
[ x y w ] \left[\begin{array}{l} x \\ y \\ w \end{array}\right] xyw 表示的点都是 [ x / w y / w 1 ] , w ≠ 0 \left[\begin{array}{l} x / w \\ y / w \\ 1 \end{array}\right], w\ne0 x/wy/w1 ,w=0。
在齐次坐标下,合法的操作:
- vector + vector = vector
- point - point = vector
- point + vector = point
- point + point = 两个点的中点
Affine Transformations(仿射变换)
放射变换等于线性变换加上一次平移变换
[ x ′ y ′ ] = [ a b c d ] [ x y ] + [ t x t y ] \left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right]=\left[\begin{array}{ll} a & b \\ c & d \end{array}\right]\left[\begin{array}{l} x \\ y \end{array}\right] + \left[\begin{array}{l} t_{x} \\ t_{y} \end{array}\right] [x′y′]=[acbd][xy]+[txty]
使用齐次坐标,变换方程如下:
[
x
′
y
′
w
′
]
=
[
1
0
t
x
0
1
t
y
0
0
1
]
[
x
y
1
]
\left[\begin{array}{l} x^{\prime} \\ y^{\prime} \\ w^{\prime} \end{array}\right]=\left[\begin{array}{ll} 1 & 0 & t_{x} \\ 0 & 1 & t_{y} \\ 0 & 0 & 1 \end{array}\right]\left[\begin{array}{l} x \\ y \\ 1 \end{array}\right]
x′y′w′
=
100010txty1
xy1
现在可以使用一个方程来表示全部变换了,唯一的代价就是多了一维,增加了空间。
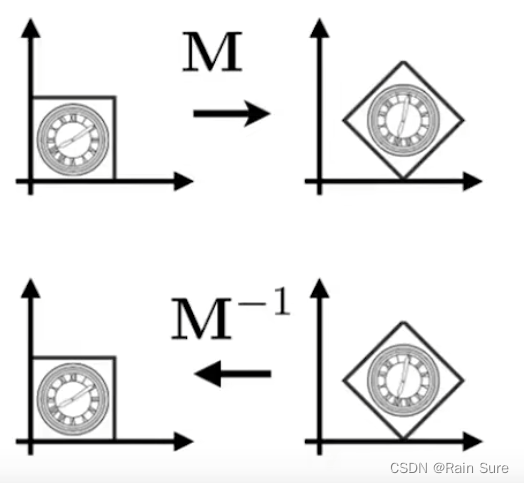
Inverse Transform(逆变换)
变换矩阵
M
M
M的逆矩阵
M
−
1
M^{-1}
M−1在几何意义下也是逆变换。
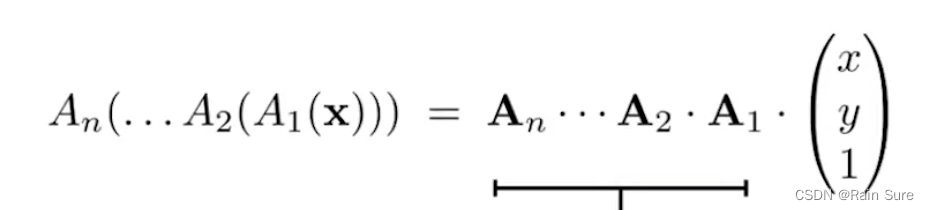
Composing Transforms(组合变换)
变换的顺序是影响最后的结果的,因为矩阵乘法不满足交换律。
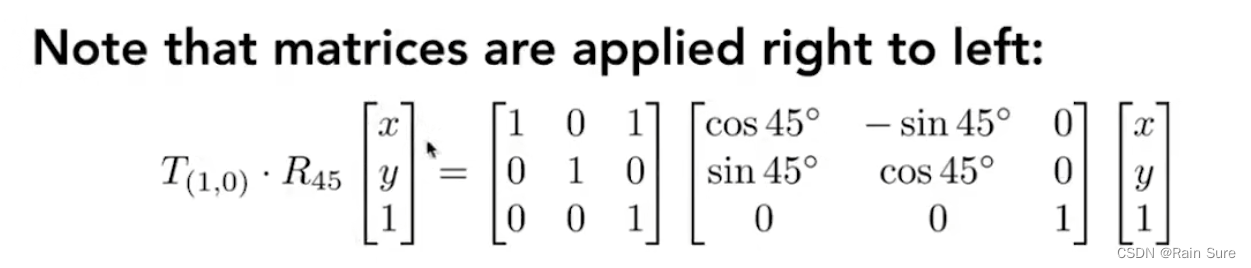
变换矩阵是从右到左进行应用的。
Decomposing Complex Transforms(分解复杂的变换)
如果绕着一个指定的顶点 c c c进行旋转:
- 首先将中心移动到原点。
- 旋转。
- 再将其移动回原来的位置。
变换表示如下:
T
(
c
)
∗
R
(
α
)
∗
T
(
−
c
)
T(c) * R(\alpha) * T(-c)
T(c)∗R(α)∗T(−c)
3D Transforms(三维的变换)
使用齐次坐标进行表示:
- 3D point = ( x . y , z , 1 ) T (x. y, z, 1)^{T} (x.y,z,1)T
- 3D vector = ( x , y , z , 0 ) T (x, y, z, 0)^{T} (x,y,z,0)T
( x , y , z , w ) ( w ≠ 0 ) (x, y, z, w)(w \ne 0) (x,y,z,w)(w=0),表示的点为 ( x / w , y / w , z / w ) (x / w, y / w, z / w) (x/w,y/w,z/w)
使用下面
4
×
4
4 \times 4
4×4的矩阵来进行仿射变换:
(
x
′
y
′
z
′
1
)
=
(
a
b
c
t
x
d
e
f
t
y
g
h
i
t
z
0
0
0
1
)
⋅
(
x
y
z
1
)
\left(\begin{array}{l} x^{\prime} \\ y^{\prime} \\ z^{\prime} \\ 1 \end{array}\right)=\left(\begin{array}{lllc} a & b & c & t_{x} \\ d & e & f & t_{y} \\ g & h & i & t_{z} \\ 0 & 0 & 0 & 1 \end{array}\right) \cdot\left(\begin{array}{l} x \\ y \\ z \\ 1 \end{array}\right)
x′y′z′1
=
adg0beh0cfi0txtytz1
⋅
xyz1
参考资源
GMAES101 Lecture03