用pytorch进行LSTM模型的学习
- LSTM模型
- 用pytorch,采用LSTM对seaborn数据集做预测
- 基本步骤
- 数据的观察
- 特殊数据处理
- 数据归一化
- 模型的构建与选择
- 模型的保存
- 飞机航班流量预测示例
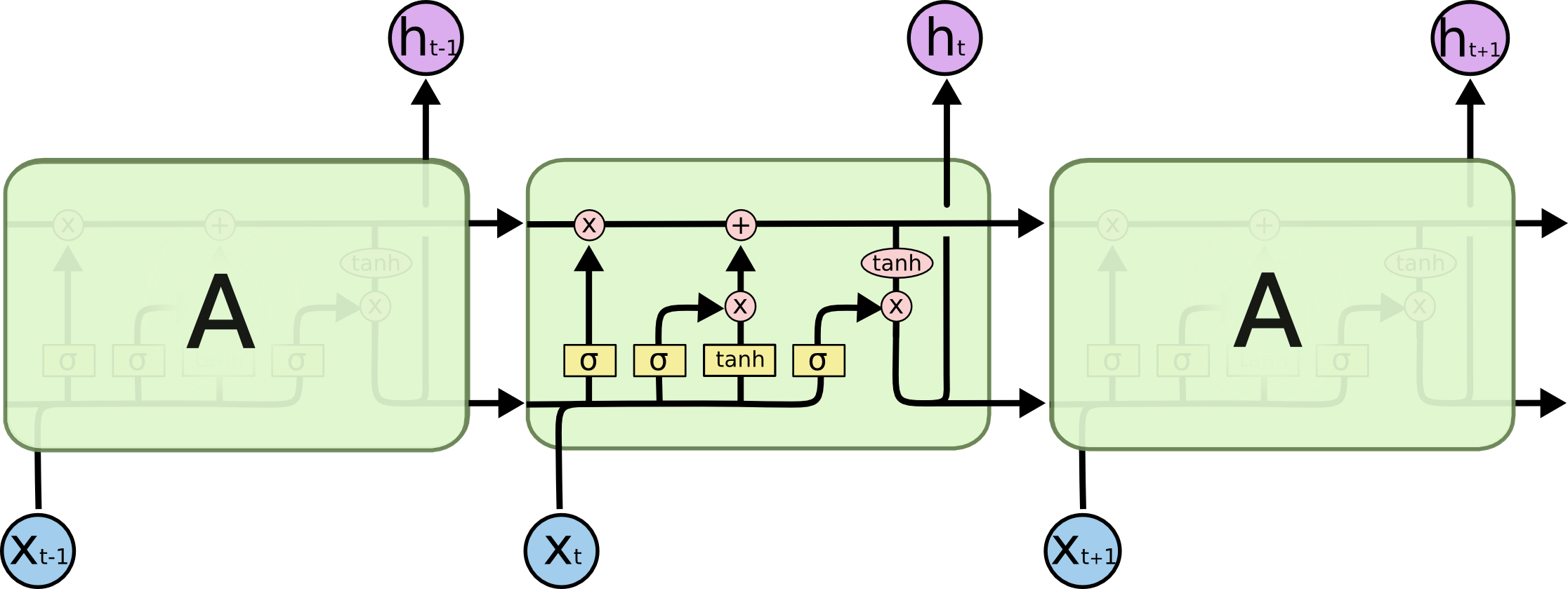
LSTM模型
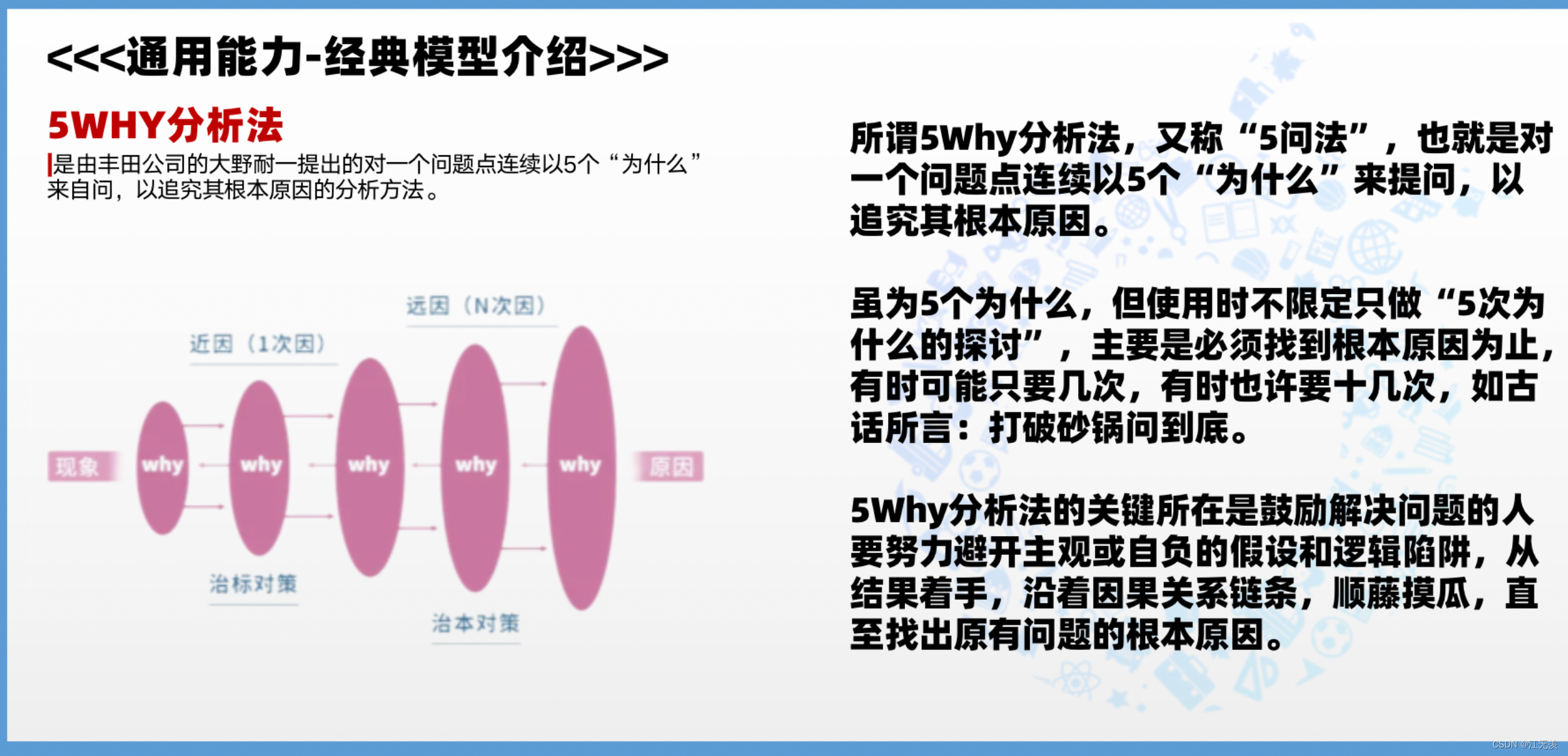
LSTM模型长下面这样,主要用在时间序列的预测,具有比RNN较好的性能。原因在于内部增加了很多门,用来控制前序信息的继续、遗忘、更新等,比RNN更好的表达了特征。
用pytorch,采用LSTM对seaborn数据集做预测
基本步骤
一般而言,进行深度学习的训练与应用包含大概如下步骤
=========工作流程=========
- 数据读取与基本处理
* 数据集读取
* 数据的观察-画图
* 特殊数据处理-空值、奇异值等
- 数据集构建
* 归一化
* 训练集、验证集、测试集划分
- 模型建模
* 基础模型架构
* 损失函数
* 优化器选择
- 模型训练
* 模型训练 与各种超参
* 训练过程观察
* 训练中模型保存
* 模型训练指标记录
- 测试验证
* 模型性能验证
* 结果可视化
* 测试性能指标记录
下面就流程中的几个重点进行说明
数据的观察
在拿到数据的时候,我们首先要对数据进行观察,观察的方法根据数据的类型略有不同,但是总体可以概括为
- 肉眼观察:打开数据文件夹或者文件进行查看,比如文件个数有多少个,数据的大小是多少。
- 数据展示观察:对于一些不好直接观察的,可以通过数据展示看一下,如打印dataframe结构的前几行,可以看到列名等信息,方便数据处理。
- 画图观察:对于一些时序信息,可以通过作图的方式,看看数据的分布情况,是否有异常点等等。
为什么要对数据进行观察?主要有以下几个原因
- 获取数据的基本信息,知道我们要处理的数据大概是怎样的。
- 对原始数据有个感觉,数据的情况可能会影响我们模型的选择。以及模型训练的策略。比如小样本数据,样本数的多少会影响下一步的决策,如是否数据增强,是否迁移等等。
- 观察到异常情况,如空值,奇异点,为下一步数据处理做准备。
特殊数据处理
机器学习处理的是数据的一般情况,即反映数据的一般规律和一般分布,对于奇异值或者特殊值,机器学习模型没有能力处理或者需要付出很大的代价才能处理。机器学习是帮助我们解决一般问题或者共性问题,对于一些特殊的问题,并不是这个学科的主要研究方向。当然,只有一个方向除外,即异常检测。
一般需要特殊处理的,有空值、错误值、奇异值。基本的处理方式有
- 删除,即删除特殊值
- 补全,补全空值
- 修正,更改错误值
数据归一化
在一般情况下,尤其是时序数据,需要进行归一化,即把数据压缩到0-1之间。目的是使得数据有相同的尺度。例如,在一个数据集中,包含样本的年龄信息,收入信息等,这两个信息的度量尺度是不同的,如果不做归一化,那么由于年龄与收入在数值上相差很大,那么年龄的特征不能在模型中发挥很好的作用。
模型的构建与选择
针对不同的任务选择不同的模型,有pytorch内置了很多基础模型,因此模型结构的构建变得简单容易,需要注意的是模型的输入参数要求以及维度匹配,这就需要我们学习pytorch内置模型的接口函数,做一个合格的调包侠
模型的保存
在训练过程中,模型是不断更新的,每一次迭代后模型的参数就会不同。在这个过程中有必要有条件地保存下当前模型,主要有如下几个用途
- 防止训练突然崩掉,重新训练浪费资源。在较长时间的训练过程中,由于种种原因,训练可能会崩溃,如突然掉电,机器故障灯,如果没有保存训练过程中的模型,则需要重新训练,那么浪费时间,浪费资源,尤其是接近训练完成的时候发生崩溃,人就更崩溃了。如果保存了模型,那么可以重新加载模型,断点续训练。
- 根据过程中保存下来的模型,我们可以查看模型演变过程,进行过程的考察。
- 测试验证用,保存模型,尤其是保存最后的或者最好的模型,在测试验证时,可以直接加载进行验证,不必再次训练
那么模型该如何保存呢? 模型保存的格式:pytorch中最常见的模型保存使用 .pt 或者是 .pth 作为模型文件扩展名。
pytorch模型保存的两种方式:
- 一种是保存整个模型,
torch.save(model, "my_model.pth") # 保存整个模型`
- 另一种是只保存模型的参数,该方法速度快,占用空间少
torch.save(model.state_dict(), "my_model.pth") # 只保存模型的参数
相应的,加载也有两种方式
- 加载整个模型
new_model = torch.load(PATH)
- 先构架模型架构,然后加载参数
new_model = Model()
new_model.load_state_dict(torch.load(PATH))
飞机航班流量预测示例
完整代码如下
# -*- coding: utf-8 -*-
# @Time : 2023/03/10 10:23
# @Author : HelloWorld!
# @FileName: seq.py
# @Software: PyCharm
# @Operating System: Windows 10
# @Python.version: 3.8
import torch
import torch.nn as nn
import argparse
import seaborn as sns
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import math
# 数据读取与基本处理
class LoadData:
def __init__(self,data_path ):
self.ori_data = pd.read_csv(data_path)
def data_observe(self):
self.ori_data.head()
self.draw_data(self.ori_data)
def draw_data(self, data):
print(data.head())
fig_size = plt.rcParams["figure.figsize"]
fig_size[0] = 15
fig_size[1] = 5
plt.rcParams["figure.figsize"] = fig_size
plt.title('Month vs Passenger')
plt.ylabel('Total Passengers')
plt.xlabel('Months')
plt.grid(True)
plt.autoscale(axis='x', tight=True)
plt.plot(data['passengers'])
plt.show()
#数据预处理,归一化
def data_process(self):
flight_data = self.ori_data.drop(['year'], axis=1) # 删除不需要的列
flight_data = flight_data.drop(['month'], axis=1) # 删删除不需要的列
flight_data = flight_data.dropna() # 滤除缺失数据
dataset = flight_data.values # 获得csv的值
dataset = dataset.astype('float32')
dataset=self.data_normalization(dataset)
return dataset
def data_normalization(self,x):
'''
数据归一化(0,1)
:param x:
:return:
'''
max_value = np.max(x)
min_value = np.min(x)
scale = max_value - min_value
y = (x - min_value) / scale
return y
#构建数据集,训练集、测试集
class CreateDataSet:
def __init__(self, dataset,look_back=2):
dataset = np.asarray(dataset)
data_inputs, data_target = [], []
for i in range(len(dataset) - look_back):
a = dataset[i:(i + look_back)]
data_inputs.append(a)
data_target.append(dataset[i + look_back])
self.data_inputs = np.array(data_inputs).reshape((-1, look_back))
self.data_target = np.array(data_target).reshape((-1, 1))
def split_train_test_data(self, rate=0.7):
# 划分训练集和测试集,70% 作为训练集
train_size = math.ceil(len(self.data_inputs) * rate) #math.ceil()向上取整
train_inputs = self.data_inputs[:train_size]
train_target = self.data_target[:train_size]
test_inputs = self.data_inputs[train_size:]
test_target = self.data_target[train_size:]
return train_inputs, train_target, test_inputs, test_target
# 构建模型
class LSTMModel(nn.Module):
''' 定义LSTM模型,由于pytorch已经集成LSTM,直接用即可'''
def __init__(self, input_size, hidden_size=4, num_layers=2, output_dim=1):
'''
:param input_size: 输入数据的特征维数,通常就是embedding_dim(词向量的维度)
:param hidden_size: LSTM中隐层的维度
:param num_layers: 循环神经网络的层数
:param output_dim:
'''
super(LSTMModel,self).__init__()
self.lstm_layer=nn.LSTM(input_size=input_size,hidden_size=hidden_size,num_layers=num_layers)
self.linear_layer=nn.Linear(hidden_size,output_dim)
def forward(self,x):
x,_=self.lstm_layer(x)
s, b, h = x.shape
x = x.view(s * b, h) # 转换成线性层的输入格式
x=self.linear_layer(x)
x= x.view(s, b, -1)
return x
#模型训练
class Trainer:
def __init__(self,args):
self.num_epoch =args.num_epoch
self. look_back=args.look_back
self.batch_size=args.batch_size
self.save_modelpath=args.save_modelpath #保存模型的位置
load_data = LoadData(args.filepath) # 加载数据
self.dataset = load_data.data_process() # 数据预处理
dataset = CreateDataSet(self.dataset , look_back=args.look_back) # 数据集开始构建
self.train_inputs, self.train_target, self.test_inputs, self.test_target = dataset.split_train_test_data() # 拆分数据集为训练集、测试集
self.data_inputs = dataset.data_inputs
#改变下输入形状
self.train_inputs = self.train_inputs.reshape(-1, self.batch_size, self.look_back)
self.train_target = self.train_target.reshape(-1, self.batch_size, 1)
self.test_inputs = self.test_inputs.reshape(-1, self.batch_size, self.look_back)
self.data_inputs = self.data_inputs.reshape(-1, self.batch_size, self.look_back)
self.model=self.build_model()
self.loss =nn.MSELoss()
self.optimizer=torch.optim.Adam(self.model.parameters(), lr=1e-2)
def build_model(self):
model=LSTMModel(input_size=self.look_back)
return model
#训练过程
def train(self):
#把数据转成torch形式的
inputs= torch.from_numpy(self.train_inputs)
target=torch.from_numpy(self.train_target)
self.model.train() #训练模式
#开始训练
for epoch in range(self.num_epoch):
#前向传播
out=self.model(inputs)
#计算损失
loss=self.loss(out,target)
#反向传播
self.optimizer.zero_grad() #梯度清零
loss.backward() #反向传播
self.optimizer.step() #更新权重参数
if epoch % 100 == 0: # 每 100 次输出结果
print('Epoch: {}, Loss: {:.5f}'.format(epoch, loss.item()))
torch.save(self.model,self.save_modelpath+'/model'+str(epoch)+'.pth')
torch.save(self.model, self.save_modelpath + '/model_last' + '.pth')
self.test()
def test(self,load_model=False):
if not load_model:
self.model.eval() # 转换成测试模式
inputs = torch.from_numpy(self.data_inputs)
# inputs = torch.from_numpy(self.test_inputs)
output = self.model(inputs) # 测试集的预测结果
else:
model=torch.load(self.save_modelpath+ '/model_last' + '.pth')
inputs = torch.from_numpy(self.data_inputs)
# inputs = torch.from_numpy(self.test_inputs)
output =model(inputs) # 测试集的预测结果
# 改变输出的格式
output = output.view(-1).data.numpy() #把tensor摊平
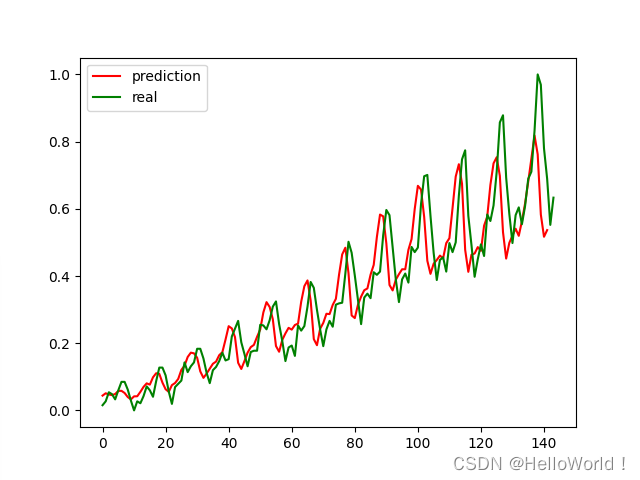
# 画出实际结果和预测的结果
plt.plot(output, 'r', label='prediction')
plt.plot(self.dataset, 'g', label='real')
# plt.plot(self.dataset[1:], 'b', label='real')
plt.legend(loc='best')
plt.show()
if __name__ == '__main__':
filepath ='seaborn-data-master/flights.csv'
save_modelpath='model-path'
parser = argparse.ArgumentParser(description=__doc__)
parser.add_argument('--num_epoch',type=int, default=1000, help='训练的轮数' )
parser.add_argument('--filepath',type=str, default=filepath, help='数据文件')
parser.add_argument('--look_back', type=int, default=2, help='根据前几个数据预测')
parser.add_argument('--batch_size', type=int, default=2, help='batch size')
parser.add_argument('--save_modelpath',type=str, default=save_modelpath, help='训练中模型要保存的位置')
args=parser.parse_args()
train=Trainer(args)
train.train()
train.test(load_model=True)
结果如下