文章标题:《VanillaNet: the Power of Minimalism in Deep Learning》
文章地址:https://arxiv.org/abs/2305.12972
github地址:https://github.com/huawei-noah/VanillaNet
华为诺亚方舟实验室和悉尼大学,2023年5月代码刚开源的文章
作者说,在卷积网络中加入人为设计的模块,达到了更好的效果,复杂度也增加了。尽管这些很深很复杂的神经网络被优化得很好,达到了令人满意的性能,但是这给部署带来了挑战。
比方说 ResNets 里的 shortcut 操作大量的芯片内存。另外,像 AS-MLP 的 axial shift 和 Swin Transformer 的 shift window self attention 这些复杂的操作需要复杂的工程实现,包括重写 CUDA 的代码。
而 ResNet 的发展看起来让大家放弃了用纯的卷积层来构造网络。就像 ResNet 它自己说的:没有 shortcut 的普通网络将出现梯度消失,导致 34 34 34 层的普通网络性能比 18 18 18 层的差。 另外,像 AlexNet 和 VGGNet 这种简单网络的性能被 ResNets 和 ViT 等深度复杂网络所超越,于是更少人花心思去设计和优化简单的网络。
于是提出了 VanillaNet,这是一种新颖的神经网络架构,强调设计的优雅和简单,同时在计算机视觉任务中保持卓越的性能。VanillaNet 通过避免过多的 depth、shortcuts 和复杂的操作(如self-attention)来实现这一点,从而产生了一系列精简的网络,这些网络解决了固有的复杂性问题,非常适合资源有限的环境。
(1)
为了训练这个 VanillaNet,作者对面临的挑战进行了全面分析,并且制定了叫做 “deep training” 的策略。简单来说就是准备好网络之后,在训练的时候逐渐消除卷积层之间的非线性层(激活函数),最后把卷积层也合并成一个。
假设激活函数(通常可以是ReLU或Tanh)表示为 A ( x ) A(x) A(x),再结合一个恒等映射(identity mapping),写成如下形式:
A
′
(
x
)
=
(
1
−
λ
)
A
(
x
)
+
λ
x
(1)
A'(x) = (1 - \lambda) A(x) + \lambda x \tag{1}
A′(x)=(1−λ)A(x)+λx(1)
其中
λ
\lambda
λ 是个超参数,用于调整这个函数
A
′
(
x
)
A'(x)
A′(x) 的非线性能力。
设总的 epochs 数是 E E E,当前是第 e e e 个 epoch,则 λ = e E \lambda = \dfrac{e}{E} λ=Ee。
所以开始的时候
λ
=
0
\lambda = 0
λ=0,这表现为一个完整的激活函数,没有恒等映射。
随着训练的进行,最后
λ
=
1
\lambda = 1
λ=1,两个卷积之间没有激活函数了。
画个图给你看:

最后把这两层卷积也合并起来,bn层也融合进来,BN融合的公式如下:

代码如下:
def _fuse_bn_tensor(self, conv, bn):
kernel = conv.weight
bias = conv.bias
running_mean = bn.running_mean
running_var = bn.running_var
gamma = bn.weight
beta = bn.bias
eps = bn.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta + (bias - running_mean) * gamma / std
(2)
这么弄了之后,为了增强网络的非线性的能力,又提出了一种有效的,基于级数的激活函数。它包含多个可学习的仿射变换。
原文如下所示:

公式写得很复杂,根据代码的理解,简单来说就是设计了一组卷积核,参数是可学习的,对激活后的数据做一次卷积,再加上BN。
把这些操作包装起来叫做自己的 Activation。画个图给你看:

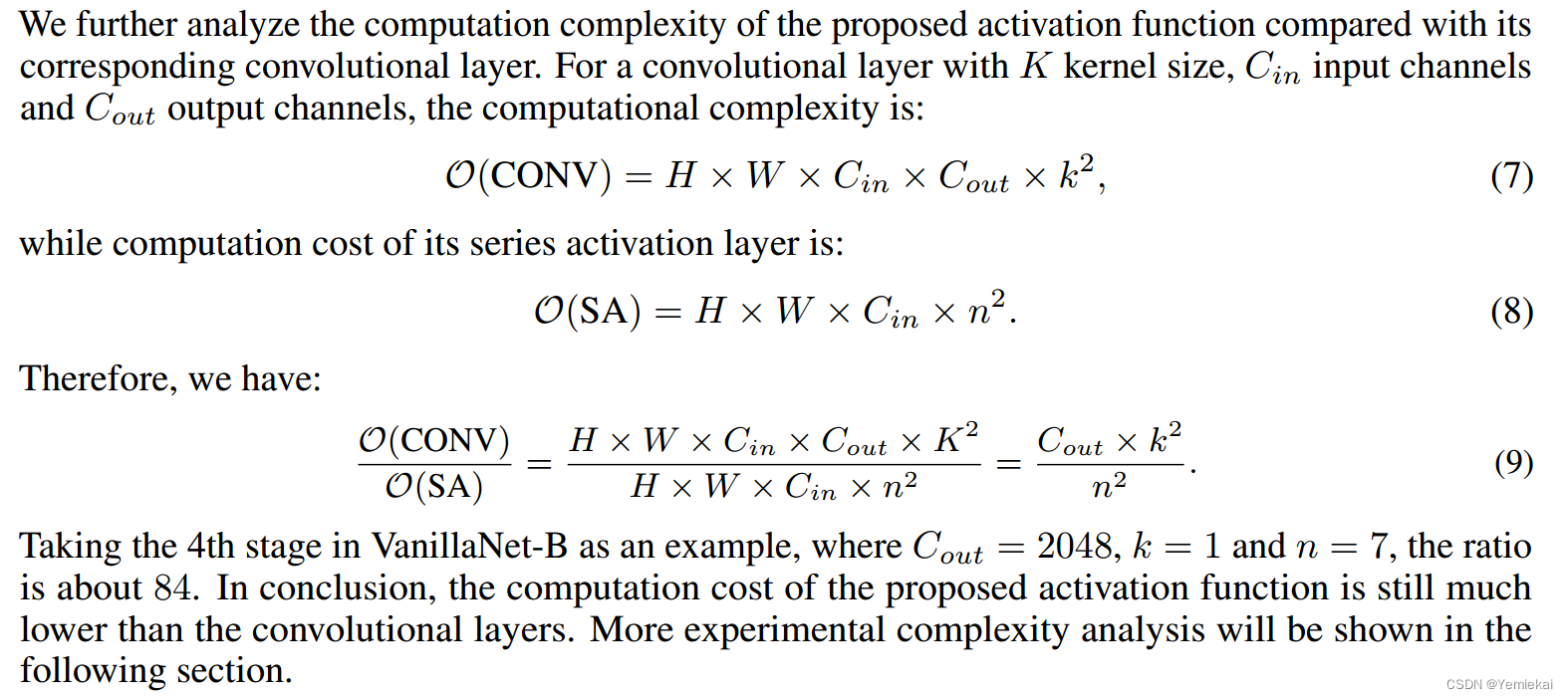
他说这个实际上比真正的卷积的计算量要小,并且给了一堆证明:
这个 Activation 是作者封装的激活函数,代码如下:
class activation(nn.ReLU):
def __init__(self, dim, act_num=3, deploy=False):
super(activation, self).__init__()
self.act_num = act_num
self.deploy = deploy
self.dim = dim
self.weight = torch.nn.Parameter(torch.randn(dim, 1, act_num*2 + 1, act_num*2 + 1))
if deploy:
self.bias = torch.nn.Parameter(torch.zeros(dim))
else:
self.bias = None
self.bn = nn.BatchNorm2d(dim, eps=1e-6)
weight_init.trunc_normal_(self.weight, std=.02)
def forward(self, x):
if self.deploy:
return torch.nn.functional.conv2d(
super(activation, self).forward(x),
self.weight, self.bias, padding=self.act_num, groups=self.dim)
else:
return self.bn(torch.nn.functional.conv2d(
super(activation, self).forward(x),
self.weight, padding=self.act_num, groups=self.dim))
def _fuse_bn_tensor(self, weight, bn):
kernel = weight
running_mean = bn.running_mean
running_var = bn.running_var
gamma = bn.weight
beta = bn.bias
eps = bn.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta + (0 - running_mean) * gamma / std
def switch_to_deploy(self):
kernel, bias = self._fuse_bn_tensor(self.weight, self.bn)
self.weight.data = kernel
self.bias = torch.nn.Parameter(torch.zeros(self.dim))
self.bias.data = bias
self.__delattr__('bn')
self.deploy = True
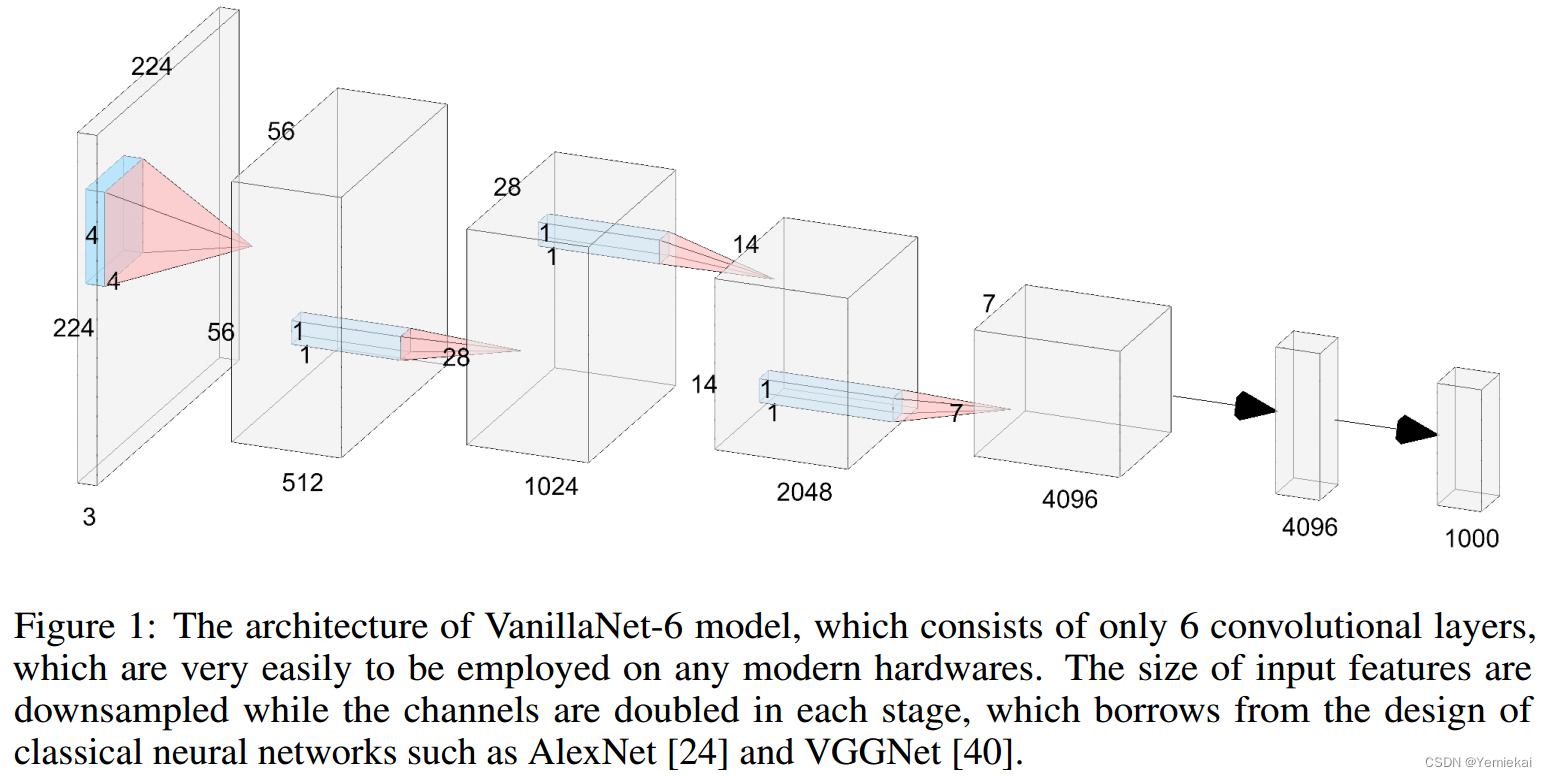
VanillaNet 的主要卖点就是以上两个东西。
整体网络很简单,看起来像 VGG 或是 AlexNet:
实验部分自己看。