在点云的3D感知算法中,常用
RandomFlip3D和GlobalRotScaleTrans的数据增强方式,这两个可以有效地增强模型的鲁棒性,提升模型的性能。
transforms=[
dict(
type='RandomFlip3D',
sync_2d=False,
flip_ratio_bev_horizontal=0.5,
flip_ratio_bev_vertical=0.5),
dict(
type='GlobalRotScaleTrans',
rot_range=[-0.78539816, 0.78539816],
scale_ratio_range=[0.95, 1.05]),
而本文的出发点在于当我们同时对相同的
data使用了多种不同的随机增强方式时,当我们需要在模型中将不同增强方法下的Feature map或者GT 3D Box进行对齐时,就需要涉及到逆变换。
尤其适用于半监督等同时有label和unlabel data的代码。
简单粗暴,我们直接上代码,注释直接写在代码中:(代码可以直接copy使用)
def align_aug_dataV2(self, pts_feats, # 可以是feature map, shape为 [B,C,H,W]
gt_bboxes_3d,# Nuscenes默认的LidarBox格式, shape为 [B,N,x], x=7或9,有无速度的区别
img_metas,
return_tensor=True, # 如果想返回的pts_feats是tensor形式,默认True
interploate_mode='bilinear'): # grid_sample的插值方式,如果是feat map,建议bilinear
'''
目前的box.tensor的格式为[x, y, z, x_size, y_size, z_size, yaw, vx, vy],shape为[N, 9]
所以对gt_box做flip需要分别处理x,y,yaw和vx,vy
'''
# feature_map: [B,C,H,W]
def horizontal_flip(feature_map):# 水平翻转
return torch.flip(feature_map, [2])
def vertical_flip(feature_map):# 垂直翻转
return torch.flip(feature_map, [1])
def box_flip(boxes, bev_direction='horizontal'):
assert bev_direction in ('horizontal', 'vertical')
if bev_direction == 'horizontal':
boxes.tensor[:, 1] = -boxes.tensor[:, 1] # y
boxes.tensor[:, 6] = -boxes.tensor[:, 6] + np.pi
boxes.tensor[:, 7] = boxes.tensor[:, 7] # vx
boxes.tensor[:, 8] = -boxes.tensor[:, 8] # vy
elif bev_direction == 'vertical':
boxes.tensor[:, 0] = -boxes.tensor[:, 0] # x
boxes.tensor[:, 6] = -boxes.tensor[:, 6]
boxes.tensor[:, 7] = -boxes.tensor[:, 7] # vx
boxes.tensor[:, 8] = boxes.tensor[:, 8] # vy
return boxes
aligned_pts_feats = []
aligned_gt_bboxes_3d = deepcopy(gt_bboxes_3d)
for idx, (pts_feat, boxes_3d, img_meta) in enumerate(
zip(pts_feats, aligned_gt_bboxes_3d, img_metas)):
# 数据增强Pipline处理时aug顺序: RandomFlip3D, GlobalRotScaleTrans(rot, scale, trans)
# 逆变换align顺序需要倒过来
# ----------------------------------------------------
pts_feat = pts_feat.unsqueeze(0)
tgt_size = pts_feat.shape
dev = pts_feat.device
# GlobalRotScaleTrans
if 'pcd_trans' in img_meta:
if not (img_meta['pcd_trans'] == 0.).all():
# TODO: 这一部分我没有测试,因为默认没有使用到,所有有需要自行进行测试
# 1. feat map
Trans = torch.zeros_like(img_meta['pcd_rotation'].T) # [3,3]
Trans[0,0], Trans[1,1] = 1,1
Trans[:2,2] = img_meta['pcd_trans'][:2]
Trans = Trans[:2,:].unsqueeze(0) # [B,2,3]
grid = F.affine_grid(Trans, tgt_size).to(dev) # # 仿射变换矩阵
pts_feat = F.grid_sample(pts_feat, # 输入tensor,shape为[B,C,W,H]
grid, # 上一步输出的gird,shape为[B,C,W,H]
mode=interploate_mode)
# 2. gt_boxes
boxes_3d.translate(-img_meta['pcd_trans'])
if 'pcd_scale_factor' in img_meta:
if img_meta['pcd_scale_factor'] != 1.:
# 1. feat map
Scl = torch.zeros_like(img_meta['pcd_rotation'].T) # [3,3]
Scl[0,0], Scl[1,1] = 1/img_meta['pcd_scale_factor'], 1/img_meta['pcd_scale_factor']
Scl = Scl[:2,:].unsqueeze(0) # [B,2,3]
grid = F.affine_grid(Scl, tgt_size).to(dev) # # 仿射变换矩阵
pts_feat = F.grid_sample(pts_feat, # 输入tensor,shape为[B,C,W,H]
grid, # 上一步输出的gird,shape为[B,C,W,H]
mode=interploate_mode)
# 2. gt_boxes
boxes_3d.scale(1/img_meta['pcd_scale_factor'])
if 'pcd_rotation' in img_meta:
if img_meta['pcd_rotation'][0,0] != 1.:
# 1. feat map
Rot = img_meta['pcd_rotation'].T # [3,3]
Rot = Rot[:2,:].unsqueeze(0) # [B,2,3]
grid = F.affine_grid(Rot, tgt_size).to(dev) # # 仿射变换矩阵
pts_feat = F.grid_sample(pts_feat, # 输入tensor,shape为[B,C,W,H]
grid, # 上一步输出的gird,shape为[B,C,W,H]
mode=interploate_mode)
# 2. gt_boxes
boxes_3d.rotate(img_meta['pcd_rotation'].T)
pts_feat = pts_feat[0]
# ----------------------------------------------------
# RandomFlip3D
if 'pcd_vertical_flip' in img_meta:
if img_meta['pcd_vertical_flip']:
# 1. feat map
pts_feat = vertical_flip(pts_feat)
# 2. gt_boxes
boxes_3d = box_flip(boxes_3d, bev_direction='vertical')
if 'pcd_horizontal_flip' in img_meta:
if img_meta['pcd_horizontal_flip']:
# 1. feat map
pts_feat = horizontal_flip(pts_feat)
# 2. gt_boxes
# boxes_3d.flip(bev_direction='horizontal')
boxes_3d = box_flip(boxes_3d, bev_direction='horizontal')
aligned_pts_feats.append(pts_feat)
aligned_gt_bboxes_3d[idx] = boxes_3d
if return_tensor:
aligned_pts_feats = torch.stack(aligned_pts_feats)
return aligned_pts_feats, aligned_gt_bboxes_3d
有几点需要注意:
- feat map在经过Flip之后也不全是一一对应,因为在卷积过程中,翻转后对应的位置不同,所以feat在经过翻转变换之后略有不同是正常现象;
测试效果
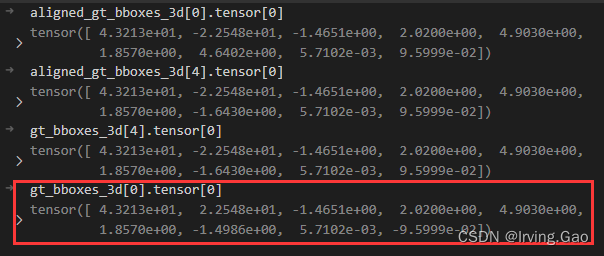
测试一下把有aug的feat map和GT都 对齐到没有aug的情况下:
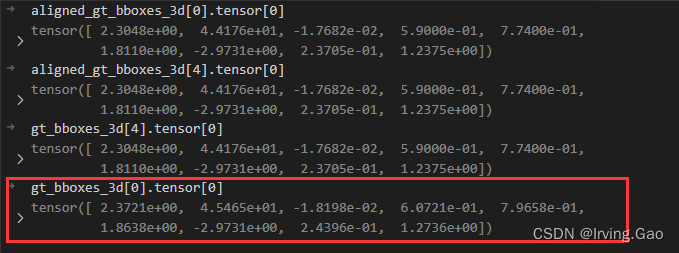
# 测试代码: (1-3应当相同)
# 1.aligned_aug aligned_gt_bboxes_3d[0].tensor[0]
# 2.aligned_aug aligned_gt_bboxes_3d[4].tensor[0]
# 3.无aug gt_bboxes_3d[4].tensor[0]
# 4.有aug gt_bboxes_3d[0].tensor[0]
-
加上
RandomFlip3D:(标红的为有aug的原始值)
-
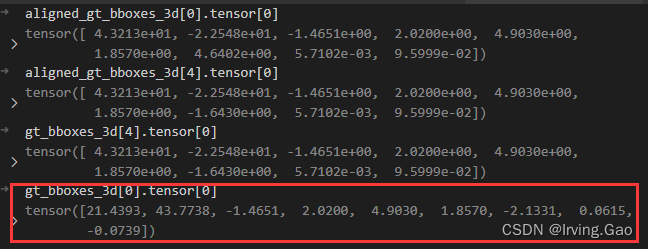
加上
RandomFlip3D和Scale:
-
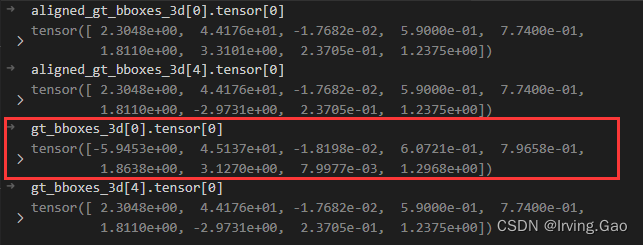
加上
RandomFlip3D和Rotate:
-
加上
RandomFlip3D和GlobalRotScaleTrans所有aug的对齐结果:
参考文章:
- Pytorch——实现Tensor矩阵的任意角度旋转、平移操作
- Pytorch中实现矩阵的的仿射变换,平移、旋转、放缩(affine_grid)