海洋海面远红外场景下的目标检测在我之前的文章中已经有过相关的实践了,感兴趣的话可以自行移步阅读即可。
《红外海洋目标检测实践,基于目标检测模型识别红外海洋目标》
《基于YOLO开发构建红外场景下无人机航拍车辆实例分割检测识别分析系统》
《红外场景下基于YOLO集成模型开发构建海洋目标检测识别分析系统》

《基于YOLOv7开发构建红外高空小目标检测识别分析系统》
《基于轻量级YOLOv5n/s/m三款模型开发构建基于无人机视角的高空红外目标检测识别分析系统,对比测试分析性能》
简单看下效果图:

接下来看下数据集情况:

标注文件如下:

这里一共开发构建了四组实验,分别是:yolov5n、yolov5s、yolov5s-eca-ca、yolov5s-eca-ca-transformer。
这里给出对应组件的核心实现。
【ECA】

【CA】
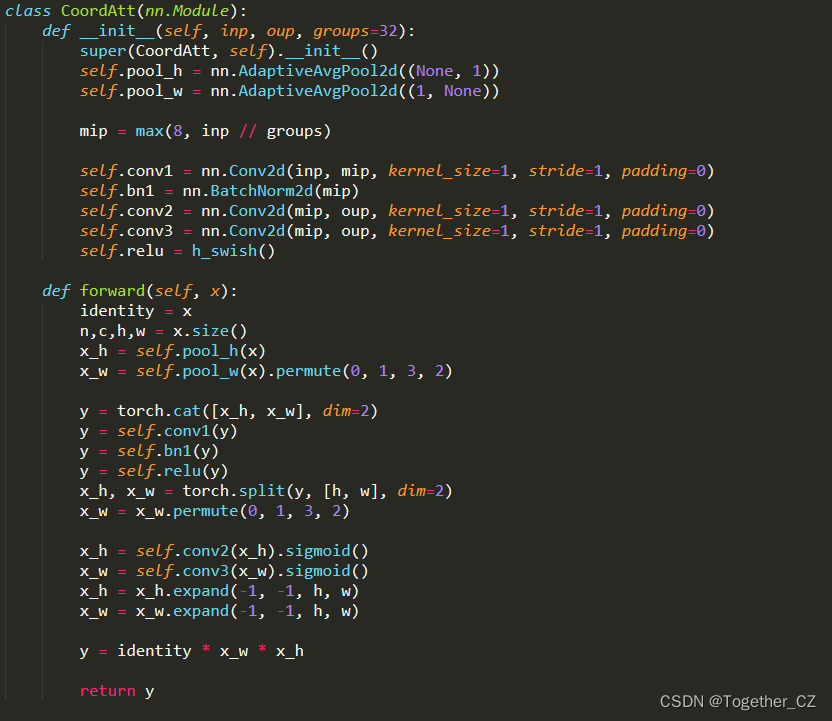
【Transformer】

当然如果这里想要使用SwinTransformer也是可以的。
这里我对四组实验进行了整体对比可视化,如下图所示:
【F1值曲线】

【Loss曲线】

【Precision曲线】

【Recall曲线】
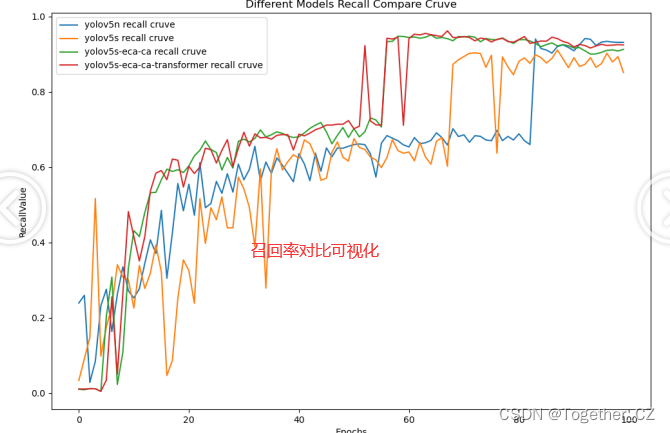
从结果评估指标上整体来看改进后的yolov5s-eca-ca-transformer结果最优。



![[2]PCB设计实验|电路板布局布线要求及规律|电抗和电容的关系|8:30~9:30](https://img-blog.csdnimg.cn/74aab51b9a654b149e169539354944a9.png)