算法的重构是压缩感知中重要的一步,是压缩感知的关键之处。因为重构算法关系着信号能否精确重建,国内外的研究学者致力于压缩感知的信号重建,并且取得了很大的进展,提出了很多的重构算法,每种算法都各有自己的优缺点,使用者可以根据自己的情况,选择适合自己的重构算法,大大增加了使用的灵活性,也为我们以后的研究提供了很大的方便。
压缩感知的重构算法主要分为三大类:
1.组合算法 2.贪婪算法 3.凸松弛算法
每种算法之中又包含几种算法,下面就把三类重构算法列举出来。
| 算法类别 | 定义 | 优缺点 | 具体算法 |
| 贪婪算法 | 贪婪算法首先选取合适的原子,再逐步进行递增,进而逼近信号矢量,利用这种过程进行 | 计算量和精度的要求居中,也是三种重构算法中应用最大的一种 | (1)匹配追踪算法 (2)正交匹配追踪算法 (3)分段正交匹配追踪算法 (4)正则化正交匹配追踪算法 (5)稀疏自适应匹配追踪算法 |
| 组合算法 | 先是对信号进行结构采样,然后再通过对采样的数据进行分组测试,最后完成信号的重构 | 需要观测的样本数目比较多但运算的效率最高 | (1) 傅里叶采样 (2) 链式追踪算法 (3) HHS追踪算法 |
| 凸松弛算法 | 法,它将非凸问题转化为凸问题进行求解,即l0范数转化成l1范数并采用线性规划来求解 | 计算量大但是需要观测的数量少重构的时候精度高 | (1)基追踪算法 (2)最小全变差算法 (3)内点法 (4)梯度投影算法 (5)凸集交替投影算法 |
本文主要讲述凸松弛法
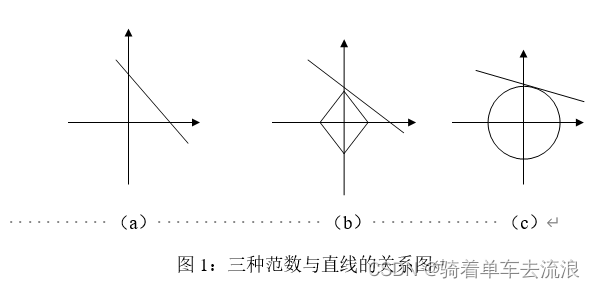
由(a)图可知,0范数在二维空间中是沿着坐标轴的两条垂直的线,直线向坐标原点逼近的时候首先是和坐标轴相交,这也就是我们所要求的稀疏的解;由(b)图可知,1范数在二维空间中的图形是一个如(b)图的菱形,排除直线和菱形的一条边平行的情况,直线向菱形逼近的过程中,首先相交于菱形的四个点,也就是坐标轴上的点,这也就是我们所要求的稀疏的解;由(c)图可知,2范数在二维空间中的图形是圆形,直线向圆形逼近的时候,直线和圆相交的点几乎都不在坐标轴上,只有直线和坐标轴平行的小概率的时候。通过上面的介绍可以知道,可以用范数来代替范数进行求解。











![[golang 微服务] 4. gRPC介绍,Protobuf结合gRPC 创建微服务](https://img-blog.csdnimg.cn/img_convert/18a78106536bfc73c7eddbce236a6287.png)