四足机器人A1目标跟踪
- 前期准备工作
- 1.安装TeamViewer
- 2.将四足机器人所有线连接好
- 3.将四足机器人调至运动模式
- 运行流程
- 1.开机阶段
- 2.运行阶段
- 效果展示
- 代码配置
前期准备工作
1.安装TeamViewer
由于外接屏幕损坏,故四足机器人内部配置了TeamViewer,因此可以在手机端下载TeamViewer app。
2.将四足机器人所有线连接好
1.幻影峡谷电源线+锂电池
2.显卡欺骗器
3.摄像头连接线
3.将四足机器人调至运动模式
操作如下流程:
L2+A-->蹲下
L2+B-->无阻尼
L1+Start-->运动模式
Start-->原地踏步
运行流程
1.开机阶段
(1).四足机器人开机,等待一段时间。
(2).观看手机端Wi-Fi,待手机端搜索到Wi-Fi UnitreeRobot-526后,开启幻影峡谷
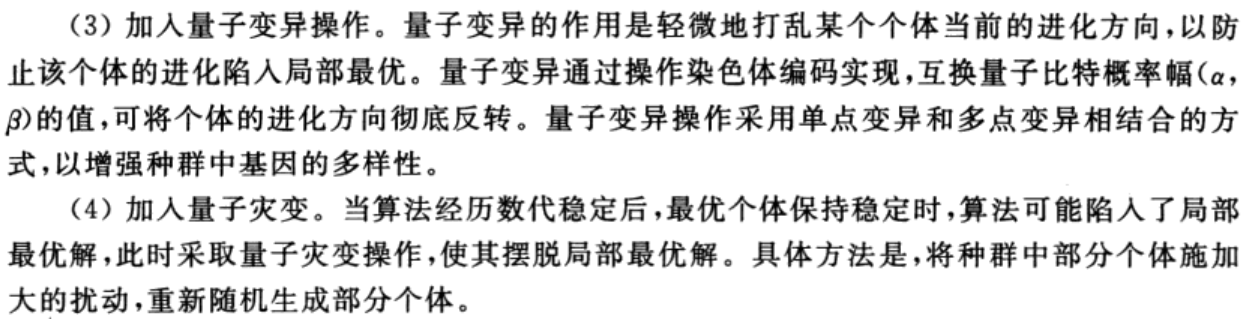
开机后由于幻影峡谷配置了自启动程序,可以自动输入登陆密码112并运行TeamViewer,且自动连接Wi-Fi UnitreeRobot-526。如下图
(3).通过手机软件TeamViewer app利用局域网连接幻影峡谷
访问的ip为192.168.123.176
访问密码为112Lab.+
2.运行阶段
开始运行多目标跟踪程序,有两种方式。
方式1:
(4).直接运行主目录下的quadruped-robot-run.sh文件。
虽然这种方式运行方便,但是这种方式会有一些小问题:在关闭的时候不太好操作,除非外接键盘。
方式2:
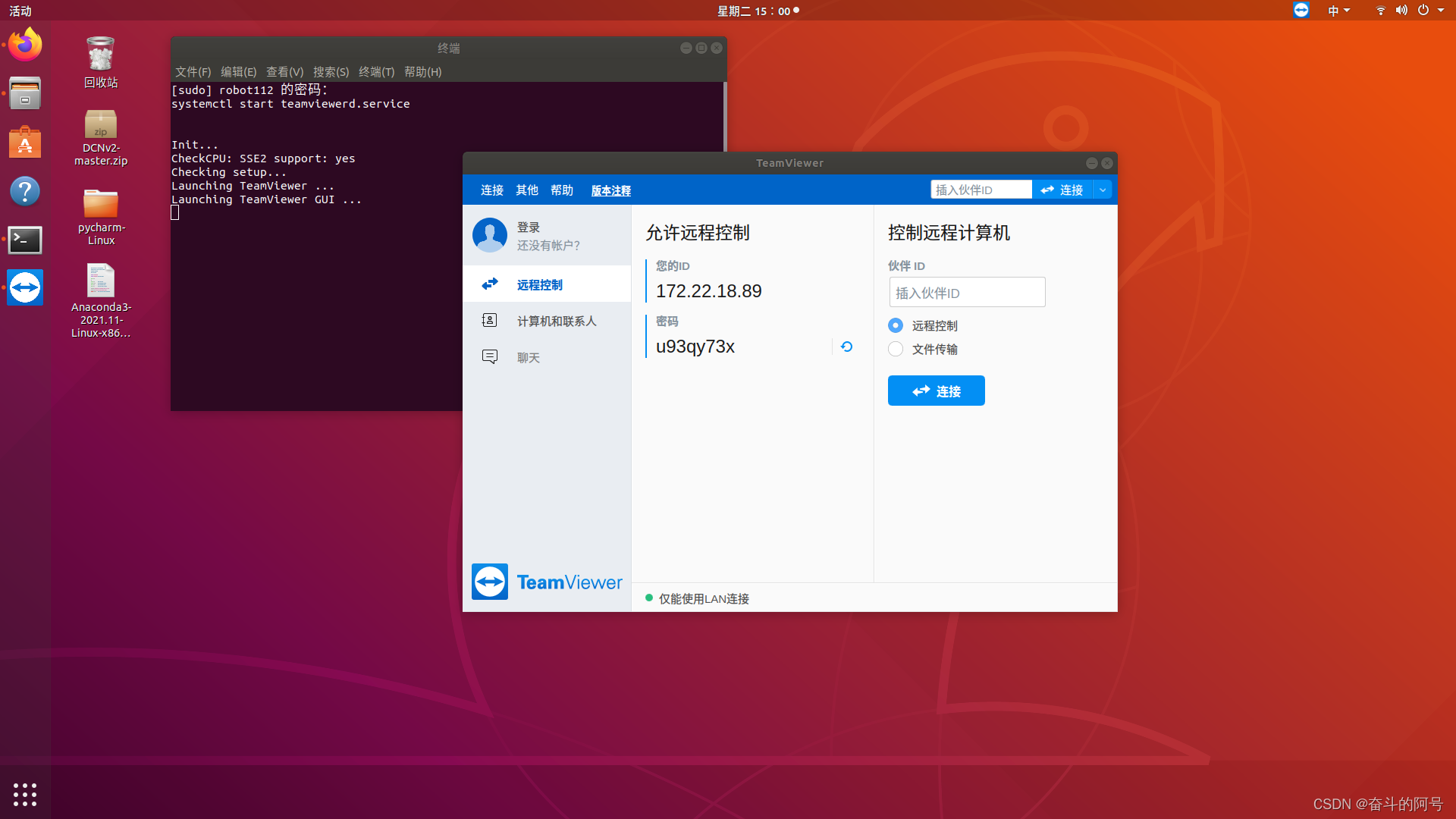
(4).打开桌面上的pycharm-Linux
然后进入pycharm-community-2021.2/bin文件夹,如下图
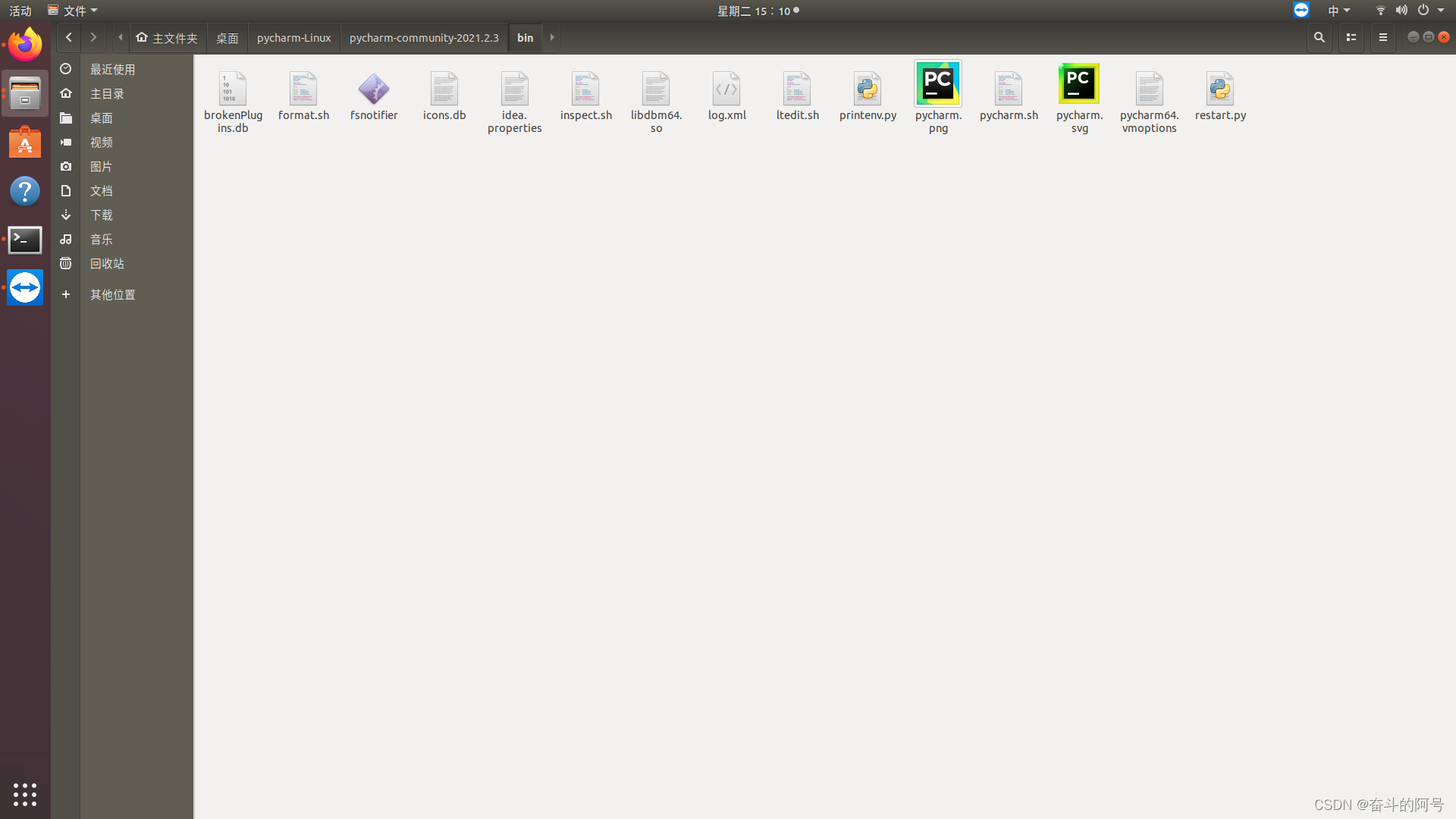
(5).运行上图中的pycharm.sh打开pycharm
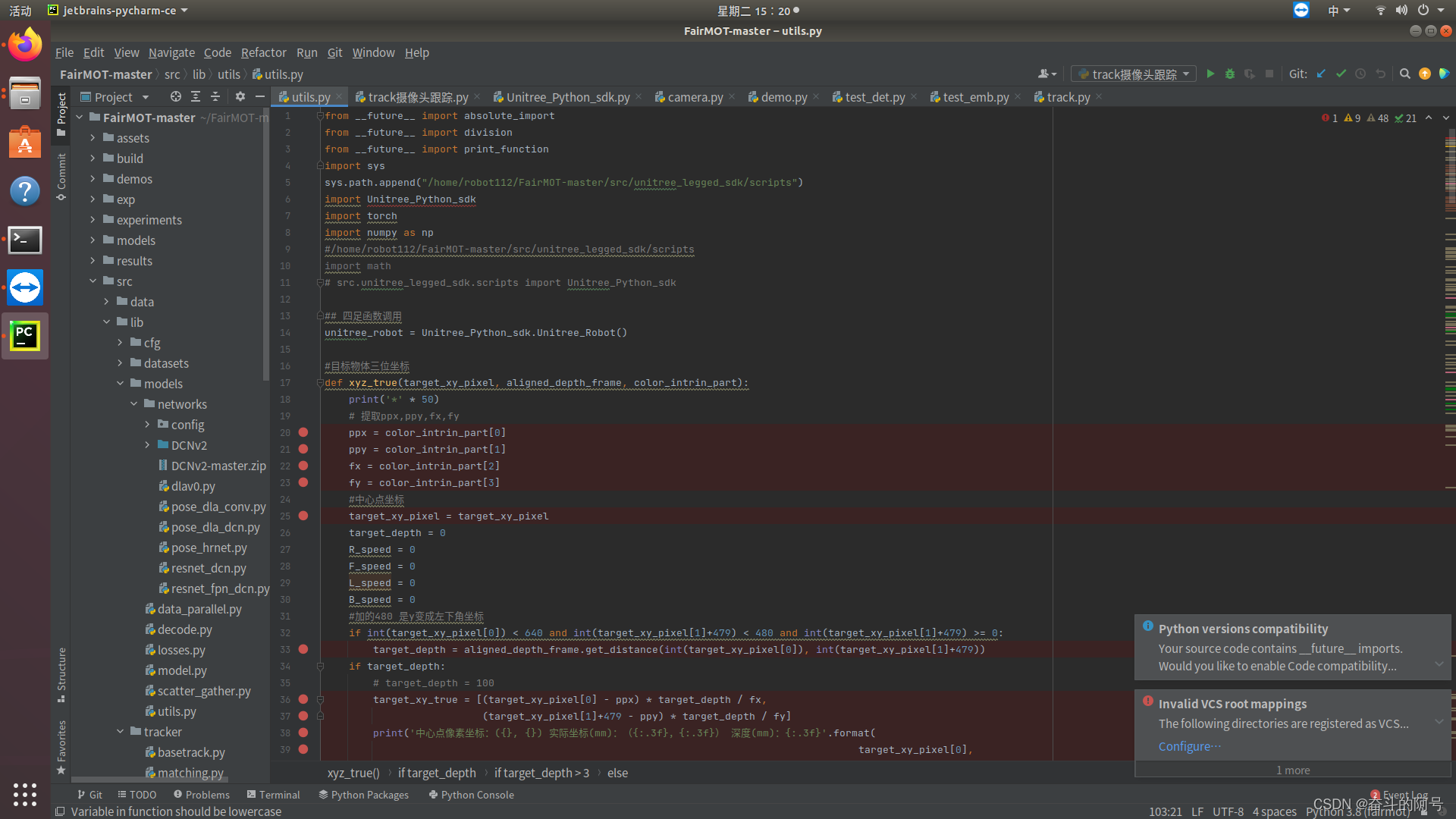
(6).pycharm打开后,站在四足机器人前面2~3m左右,运行下图中的track摄像头跟踪.py程序
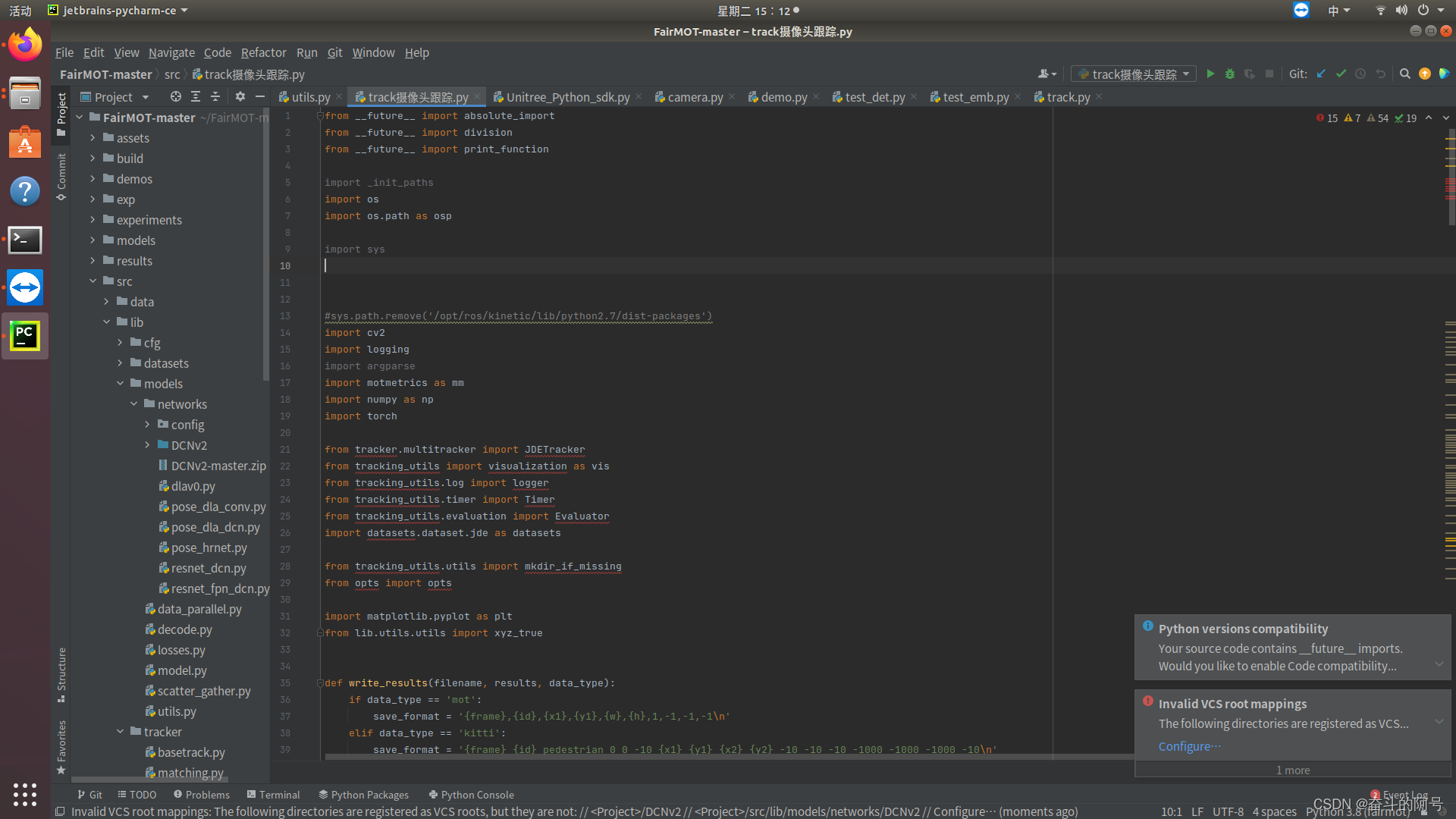
(7).等待结果就好
效果展示
四足机器人跟踪效果展示
代码配置
1.在幻影峡谷中安装Unitree_Python_sdk运动控制包和D435i摄像头PyRealsense包
2.按照论文github链接中的配置FairMOT
论文地址:https://arxiv.org/pdf/2004.01888v2.pdf
开源代码:https://github.com/ifzhang/FairMOT
3.在FairMOT源码中的utils中调用Unitree_Python_sdk,并编写运动函数,如下图所示