[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rOmeEm3I-1685366971102)(data:image/svg+xml;utf8, )]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kCu0JrBB-1685366971103)(data:image/svg+xml;utf8, )]
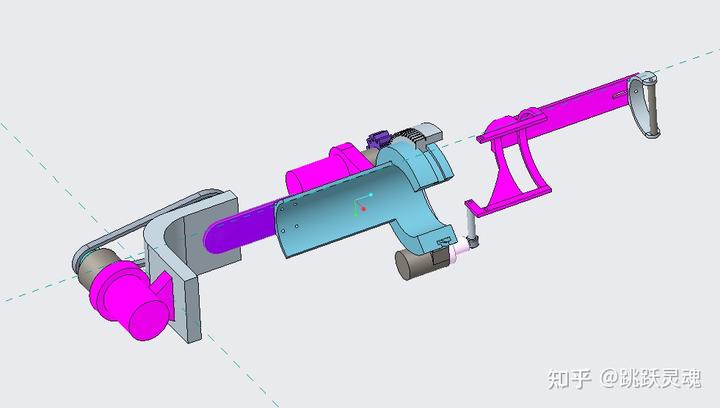
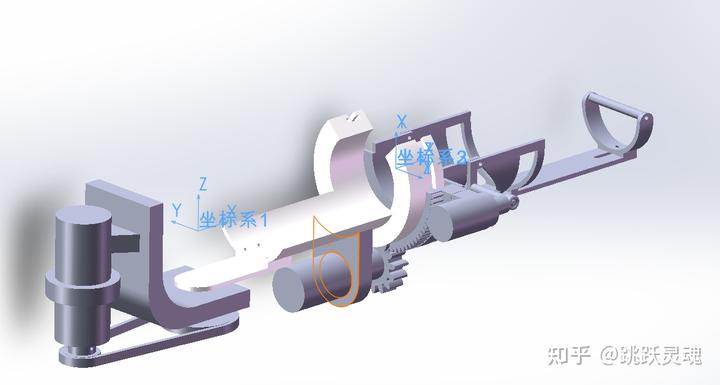
建立坐标系
1正运动学分析
采用标准的D-h法进行机械腿模型分析:

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XdnViMnl-1685366971103)(data:image/svg+xml;utf8, )]
将连杆坐标系的原点建立在连杆的关节连杆末端。
一、建立D-H连杆坐标系的原则
1.Z,轴沿关节轴i+1的轴向。
2.原点O为Zi.,与Zi轴的交点或其公垂线与关节轴Zi的交点。3.Xi轴沿Zi与Zi轴的公垂线方向,由关节轴i指向关节轴i+1。4.Yi轴按照右手定则确定。
二、D-H参数的含义
1.连杆长度ai:定义为从Zi-1移动到Zi的距离,沿Xi轴指向为正。其实质为公垂线的长度。
2.连杆转角αi:定义为从Z i-1旋转到zi的角度,绕Xi轴正向旋转为正。
3.关节偏距di,:定义为从X i-1移动到Xi的距离,沿Z i-1轴指向为正。其实质为两条公垂线之间的距离。
4.关节角0i,:定义为从X i-1旋转到Xi的角度,绕Zi轴正向旋转为正。
三、相邻坐标系之间的齐次变换矩阵
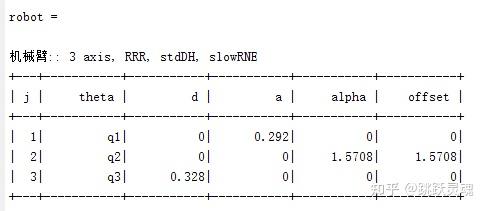
D-h表如下
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rU0OlPqc-1685366971104)(data:image/svg+xml;utf8, )]
(2)通过(1)求解出机器人各位姿变换矩阵后,求解机器人手臂变换矩阵
**
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-9SYtilS9-1685366971104)(data:image/svg+xml;utf8, )]
**
。通过matlab 计算,写出机器人末端位置。
正运动学分析
根据D-H表规定得到如下变换矩阵为:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-V84narqG-1685366971105)(data:image/svg+xml;utf8, )]
由此可得机器人相邻两关节位姿分别为:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-9OJBS3dA-1685366971105)(data:image/svg+xml;utf8, )]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-hfODIeid-1685366971106)(data:image/svg+xml;utf8, )]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UFY51TOA-1685366971106)(data:image/svg+xml;utf8, )]
所以,坐标系{4}相对于基坐标系的变换矩阵为:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-MFP5dxut-1685366971107)(data:image/svg+xml;utf8, )]
相对于基坐标系的旋转矩阵
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-M1bDbar6-1685366971107)(data:image/svg+xml;utf8, )]
位置矢量

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WFi8osv6-1685366971108)(data:image/svg+xml;utf8, )]
根据DH参数求解变换矩阵的函数trans:
%输入JD,即6个关节变量的值,求解正运动方程
function [ T ] = trans( theta, d, a, alpha )
T =[
cos(theta), -sin(theta)*cos(alpha), sin(theta)*sin(alpha), a*cos(theta);
sin(theta), cos(theta)*cos(alpha), -cos(theta)*sin(alpha), a*sin(theta);
0, sin(alpha), cos(alpha), d;
0, 0, 0, 1 ];
end
正向运动学:
function [ T06 ] = fkine(JD)
%JD为输入的1*6的数组,代表6个关节变量
% trans( theta, d, a, alpha )
if nargin<2; end
T01 =trans( JD(1), 0, 0.292, pi/2 );
T12 =trans( JD(2)+pi/2, 0, 0, pi/2);
T23 =trans( JD(3), 0.328, 0, 0);
T06 =T01*T12*T23;
End
机器人逆运动学分析
机器人逆运动学问题采用矩阵逆乘方法进行求解,如下所示:
- 求关节角:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-maiJl27j-1685366971108)(data:image/svg+xml;utf8, )]
(1)
对上述方程除以
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-o4pZV5CA-1685366971109)(data:image/svg+xml;utf8, )]
得到如下:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-piGx4vV8-1685366971110)(data:image/svg+xml;utf8, )]
(2)
则
- 求关节角:
由方程式两端的第一行第三列对应相等,第二行第三列对应相等可得:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-pMtNvFPQ-1685366971110)(data:image/svg+xml;utf8, )]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HmuBsPEi-1685366971111)(data:image/svg+xml;utf8, )]
通过上述公式运算,整理可得
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UYp9G3C3-1685366971111)(data:image/svg+xml;utf8, )]
- 求关节角
对式子两边连续乘以A1-A2的逆矩阵,可得
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-9DjBXO83-1685366971112)(data:image/svg+xml;utf8, )]
让上述公式中第一行第三列对应相等,第二行第三列对应相等可得:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-JghrStg4-1685366971112)(data:image/svg+xml;utf8, )]
3机器人模型建立
所设计的机器人由多个连杆机构组成,其关节类型包括旋转关节和移动关节两种。利用Matlab中机器人仿真工具箱Robotics Tool中Link和SerialLink两个函数可建立机器人模型[]。其中,函数表达式如下:
式中,theta为关节变量;_d_为偏置距离;alpha为扭转角;_a_为连杆长度;sigma表示关节类型(0为旋转关节,1为移动关节);前四个参数分别对应表1中的

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3WW54ow5-1685366971113)(data:image/svg+xml;utf8, )]
,

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2BcOiMBf-1685366971113)(data:image/svg+xml;utf8, )]
,
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oYaXFO2G-1685366971114)(data:image/svg+xml;utf8, )]
,
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Fz1ExS6w-1685366971114)(data:image/svg+xml;utf8, )]
。
具体程序编制如下:
Clear %情况matlab软件的数据缓存,避免影响本次运行
Clc %清空运行窗口的数据
L(1) = Link( ‘d’, 0, ‘a’ , 0.292 , ‘alpha’, pi/2 ,‘offset’,0);
L(2) = Link( ‘d’, 0 , ‘a’ ,0 , ‘alpha’, pi/2, ‘offset’,pi/2);
L(3) = Link( ‘d’, 0.328, ‘a’ , 0 , ‘alpha’,0 ,‘offset’,0);%
robot = SerialLink(L, ‘name’ , ‘机械臂’); %建立三自由度模型
robot.teach; %画出模型并进行调控
robot.display(); %显示建立的机器人的DH参数
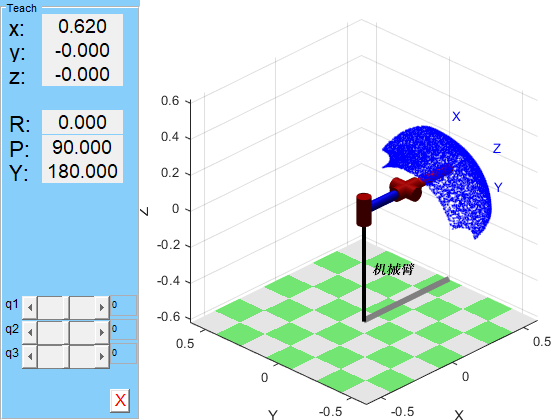
运行上述程序,即可得到机器人模型如图 3-3

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Z5eEciLp-1685366971115)(data:image/svg+xml;utf8, )]
图 3-3机器臂模型
运动空间分析
依据机器人三个自由度的运动范围,采用三自由度机器人模型进行计算。采用蒙特卡洛方法,通过Matlab编程,程序如下:
L(1) = Link( ‘d’, 0, ‘a’ , 0.292 , ‘alpha’, 0 ,‘offset’,0);
L(2) = Link( ‘d’, 0 , ‘a’ ,0 , ‘alpha’, pi/2, ‘offset’,pi/2);
L(3) = Link( ‘d’, 0.328, ‘a’ , 0 , ‘alpha’,0 ,‘offset’,0);
robot = SerialLink(L, ‘name’ , ‘机械臂’); %建立四自由度模型
% RRP.plotopt = {‘workspace’,[-10,10,-10,10,-10,10],‘tilesize’,10}; %设置模型空间大小和地砖大小
robot.teach; %画出模型并进行调控
robot.display(); %显示建立的机器人的DH参数
%%
hold on;
N=10000; %随机次数
%关节角度限制
limitmax_1 = 0;
limitmin_1 = 90;
limitmax_2 = 0;
limitmin_2 = 120;
limitmax_3 = -45;
limitmin_3 = 45;
theta1=(limitmin_1+(limitmax_1-limitmin_1)*rand(N,1))*pi/180; %关节1限制
theta2=(limitmin_2+(limitmax_2-limitmin_2)*rand(N,1))*pi/180; %关节2限制
theta3=(limitmin_3+(limitmax_3-limitmin_3)*rand(N,1))*pi/180; %关节3限制
qq=[theta1,theta2,theta3];
Mricx=robot.fkine(qq);
Mricx=transl(Mricx);
x=reshape(Mricx(:,1),N,1);
y=reshape(Mricx(:,2),N,1);
z=reshape(Mricx(:,3),N,1);
plot3(x,y,z,‘b.’,‘MarkerSize’,0.5);%画出落点
hold on;
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UlOJFWAb-1685366971115)(data:image/svg+xml;utf8, )]
三维模型+word+仿真源代码下载链接
(下载咨询链接:matlab正逆运动学分析与轨迹规划])







![[创业之路-72] :创业公司发展模式的选择:技工贸还是贸工技?](https://img-blog.csdnimg.cn/img_convert/83e3e6eb117a1e2132031a8d681f0beb.webp?x-oss-process=image/format,png)