GPIO 应该是每个嵌入式设备都避免不了的。最近在做项目的时候,也遇到这方面的问题,所以简单总结一下。
现在内核里面多了 gpiod 的来控制 gpio 口,相对于原来的形式,使用 gpiod 的好处是我们申请后不进行 free 也没有什么问题。但是你要是使用原来的方式后,一定要记得释放。不释放的话可能会有问题。

#旧的 GPIO 使用实例
DTS 文件
det-gpios = <&gpio3 RK_PA6 IRQ_TYPE_EDGE_BOTH>;
驱动文件调用
gc5025->det_pin = of_get_named_gpio_flags(node, "det-gpios", 0, &det_flags);
camera_det_irq = gpio_to_irq(gc5025->det_pin);
gc5025->det_value = gpio_get_value(gc5025->det_pin);
/*判断注册终端*/
if(camera_det_irq){
if (gpio_request(gc5025->det_pin, "camera-irq-gpio")) {
printk("gpio %d request failed!\n", gc5025->det_pin);
gpio_free(gc5025->det_pin);
return IRQ_NONE;
}
ret = request_irq(camera_det_irq, camera_det_irq_handler, IRQ_TYPE_EDGE_BOTH, "det-gpio", NULL);
if (ret != 0) {
free_irq(camera_det_irq, NULL);
dev_err(dev, "Failed to request IRQ: %d\n", ret);
return ret;
}
}
# 新的 GPIOD 文档
Linux 内核文档
https://www.kernel.org/doc/Documentation/gpio/consumer.txt
#头文件
我们需要包含头文件
#include <linux/gpio/consumer.h>
看头文件里面包含的函数列表
desc_to_gpio
devm_get_gpiod_from_chi
devm_gpiod_get
devm_gpiod_get_array
devm_gpiod_get_array_op
devm_gpiod_get_index
devm_gpiod_get_index_op
devm_gpiod_get_optional
devm_gpiod_put
devm_gpiod_put_array
fwnode_get_named_gpiod
gpio_to_desc
gpiod_cansleep
gpiod_count
gpiod_direction_input
gpiod_direction_output
gpiod_direction_output_
gpiod_export
gpiod_export_link
gpiod_get
gpiod_get_array
gpiod_get_array_optiona
gpiod_get_direction
gpiod_get_index
gpiod_get_index_optiona
gpiod_get_optional
gpiod_get_raw_value
gpiod_get_raw_value_can
gpiod_get_value
gpiod_get_value_canslee
gpiod_is_active_low
gpiod_put
gpiod_put_array
gpiod_set_array_value
gpiod_set_array_value_c
gpiod_set_debounce
gpiod_set_raw_array_val
gpiod_set_raw_array_val
gpiod_set_raw_value
gpiod_set_raw_value_can
gpiod_set_value
gpiod_set_value_canslee
gpiod_to_irq
gpiod_unexport
#获取 gpio 描述符和释放
使用一下两个函数获取 GPIO 设备,多个设备时需要附带 index 参数。函数返回一个 GPIO 描述符,或一个错误编码,可以使用 IS_ERR() 进行检查:
struct gpio_desc *gpiod_get(struct device *dev, const char *con_id,
enum gpiod_flags flags)
struct gpio_desc *gpiod_get_index(struct device *dev,
const char *con_id, unsigned int idx,
enum gpiod_flags flags)
或者也可以使用如下两个函数获取可用设备:
struct gpio_desc *gpiod_get_optional(struct device *dev,
const char *con_id,
enum gpiod_flags flags)
struct gpio_desc *gpiod_get_index_optional(struct device *dev,
const char *con_id,
unsigned int index,
enum gpiod_flags flags)
使用如下函数同时获取多个设备:
struct gpio_descs *gpiod_get_array(struct device *dev,
const char *con_id,
enum gpiod_flags flags)
该函数返回一个GPIO描述结构体:
struct gpio_descs {
unsigned int ndescs;
struct gpio_desc *desc[];
}
一个GPIO描述符可以使用如下函数释放:
void gpiod_put(struct gpio_desc *desc)
void gpiod_put_array(struct gpio_descs *descs)
需要注意GPIO描述符被释放后不可再使用,而且不允许使用第一个函数来释放通过序列获取得到GPIO描述符。
#举个例子
#dts 文件
gc5025: gc5025@37 {
status = "okay";
compatible = "galaxycore,gc5025";
reg = <0x37>;
clock-frequency = <400000>;
pinctrl-names = "default";
pinctrl-0 = <&cif_clkout_m0>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
avdd-supply = <&vcc2v8_dvp>;
dovdd-supply = <&vcc1v8_dvp>;
dvdd-supply = <&vdd1v2_dvp>;
reset-gpios = <&gpio3 RK_PA3 GPIO_ACTIVE_LOW>;
pwdn-gpios = <&gpio0 RK_PA0 GPIO_ACTIVE_HIGH>;
det-gpios = <&gpio3 RK_PA6 IRQ_TYPE_EDGE_BOTH>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "CMK-CW4191-FG1";
rockchip,camera-module-lens-name = "CK5502";
port {
ucam_out: endpoint {
remote-endpoint = <&mipi_in_ucam>;
data-lanes = <1 2>;
};
};
};
驱动文件调用:
gc5025->reset_gpio = devm_gpiod_get(dev, "reset", GPIOD_OUT_LOW);
if (IS_ERR(gc5025->reset_gpio))
dev_warn(dev, "Failed to get reset-gpios\n");
gc5025->pwdn_gpio = devm_gpiod_get(dev, "pwdn", GPIOD_OUT_LOW);
if (IS_ERR(gc5025->pwdn_gpio))
dev_warn(dev, "Failed to get pwdn-gpios\n");
/*新的GPIO子系统方式,这种方式不需要手动释放资源*/
gc5025->det_gpio = devm_gpiod_get(dev, "det", GPIOD_OUT_LOW);
if (IS_ERR(gc5025->det_gpio))
#GPIO 使用
#设置 GPIO 口方向
int gpiod_direction_input(struct gpio_desc *desc)
int gpiod_direction_output(struct gpio_desc *desc, int value)
#检查 GPIO 口是方向
int gpiod_get_direction(const struct gpio_desc *desc)
函数返回 GPIOF_DIR_IN 或者 GPIOF_DIR_OUT
#读取 GPIO 口电平
访问分为两种,一种是通过储存器读写实现的,这种操作属于原子操作,不需要等待,所以可以在中断处理程序中使用:
int gpiod_get_value(const struct gpio_desc *desc);
void gpiod_set_value(struct gpio_desc *desc, int value);
还有一种访问必须通过消息总线比如 I2C 或者 SPI,这种访问需要在总线访问队列中等待,所以可能进入睡眠,此类访问不能出现在 IRQ handler。可以使用如下函数分辨这些设备:
int gpiod_cansleep(const struct gpio_desc *desc)
使用如下函数读写:
int gpiod_get_value_cansleep(const struct gpio_desc *desc)
void gpiod_set_value_cansleep(struct gpio_desc *desc, int value)
#active-low和raw-value
active-low & raw value 有些设备采用低电平有效的方式输出逻辑信号。此时低电平输出 1,高电平输出 0。此时可以通过访问 raw_value 的方式来访问实际电路上的值,与逻辑处理无关:假设我们在 DTS 里面这样设置
reset-gpios = <&gpio3 RK_PA3 GPIO_ACTIVE_LOW>;
然后我们这样调用
gpiod_set_value_cansleep(gc5025->reset_gpio, 1);
因为 DTS 里面的 active 状态是 GPIO_ACTIVE_LOW,所以这个代码输出的是 低电平
gpiod_set_value_cansleep(gc5025->reset_gpio, 0);
输出的是高电平
这几个函数如下:
int gpiod_get_raw_value(const struct gpio_desc *desc)
void gpiod_set_raw_value(struct gpio_desc *desc, int value)
int gpiod_get_raw_value_cansleep(const struct gpio_desc *desc)
void gpiod_set_raw_value_cansleep(struct gpio_desc *desc, int value)
int gpiod_direction_output_raw(struct gpio_desc *desc, int value)
raw-value 的意思就是不在乎 DTS 里面的 ACTIVE,我 set 高电平,就是高电平。逻辑关系汇总如下:
Function (example) active-low property physical line
gpiod_set_raw_value(desc, 0); don’t care low
gpiod_set_raw_value(desc, 1); don’t care high
gpiod_set_value(desc, 0); default (active-high) low
gpiod_set_value(desc, 1); default (active-high) high
gpiod_set_value(desc, 0); active-low high
gpiod_set_value(desc, 1); active-low low
可以使用如下函数判断一个设备是否是低电平有效的设备。
int gpiod_is_active_low(const struct gpio_desc *desc)
#设置多个输出
这个没使用过 使用如下函数设置一组设备的输出值
void gpiod_set_array_value(unsigned int array_size,
struct gpio_desc **desc_array,
int *value_array)
void gpiod_set_raw_array_value(unsigned int array_size,
struct gpio_desc **desc_array,
int *value_array)
void gpiod_set_array_value_cansleep(unsigned int array_size,
struct gpio_desc **desc_array,
int *value_array)
void gpiod_set_raw_array_value_cansleep(unsigned int array_size,
struct gpio_desc **desc_array,
int *value_array)
#兼容旧版本
旧的 GPIO 系统使用基于标号的结构而不是基于描述符。可以使用如下两个函数进行相互转换:
int desc_to_gpio(const struct gpio_desc *desc)
struct gpio_desc *gpio_to_desc(unsigned gpio)
注意不能使用一套 API 的方法释放另一套 API 获取的设备
#和中断IRQ相关
使用如下函数获取一个 GPIO 设备对应的 IRQ 中断号
int gpiod_to_irq(const struct gpio_desc *desc)
返回值时一个 IRQ number,或者一个负数的错误代码。得到的中断号可以传递给函数 request_irq(),free_irq().
#举例子
/*新的GPIO子系统方式,这种方式不需要手动释放资源*/
gc5025->det_gpio = devm_gpiod_get(dev, "det", GPIOD_OUT_LOW);
if (IS_ERR(gc5025->det_gpio))
dev_warn(dev, "Failed to get det-gpios\n");
camera_det_irq = gpiod_to_irq(gc5025->det_gpio);
/*新gpio子系统转成旧gpio子系统*/
gc5025->det_pin = desc_to_gpio(gc5025->det_gpio);
/*读取上电gpio电平*/
gc5025->det_value = gpio_get_value(gc5025->det_pin);
/*判断注册终端*/
if(camera_det_irq){
ret = request_irq(camera_det_irq, camera_det_irq_handler, IRQ_TYPE_EDGE_BOTH, "det-gpio", NULL);
if (ret != 0) {
free_irq(camera_det_irq, NULL);
dev_err(dev, "Failed to request IRQ: %d\n", ret);
return ret;
}
}
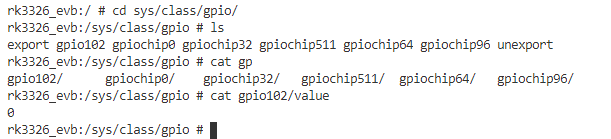
#调试
移植驱动阶段或者调试阶段的工程中,难免想知道当前 gpio 的电平状态。当然很 easy。万用表戳上去不就行了。是啊!硬件工程师的思维。作为软件工程师自然是要软件的方法。下面介绍两个 api 接口。自己摸索使用吧。点到为止。
static inline int gpio_export(unsigned gpio, bool direction_may_change);
static inline int gpio_export_link(struct device *dev, const char *name, unsigned gpio);
在你的 driver 中调用以上 api 后,编译下载。去 /sys/class/gpio 目录看看有什么发现。