1.构造Frame
为了构建一帧Frame,主要的步骤如下:
- 提取ORB特征点(
ExtractORB) - 对提取的特征点进行矫正(
cv::undistortPoints) - 计算去畸变后的图像边界(
ComputeImageBounds) - 将特征点分配到网格中(
AssignFeaturesToGrid)
A.提取ORB特征点
首先需要对当前帧图像进行特征点的提取:计算图像金字塔,提取Fast角点,四叉树均匀化,计算特征点的方向,计算特征点的描述子
1.计算图像金字塔
void ORBextractor::ComputePyramid(cv::Mat image)
{
for (int level = 0; level < nlevels; ++level)
{
float scale = mvInvScaleFactor[level];
Size sz(cvRound((float)image.cols*scale), cvRound((float)image.rows*scale));
Size wholeSize(sz.width + EDGE_THRESHOLD*2, sz.height + EDGE_THRESHOLD*2);
Mat temp(wholeSize, image.type()), masktemp;
mvImagePyramid[level] = temp(Rect(EDGE_THRESHOLD, EDGE_THRESHOLD, sz.width, sz.height));
// Compute the resized image
//计算第0层以上resize后的图像
if( level != 0 )
{
//将上一层金字塔图像根据设定sz缩放到当前层级
resize(mvImagePyramid[level-1], //输入图像
mvImagePyramid[level], //输出图像
sz, //输出图像的尺寸
0, //水平方向上的缩放系数,留0表示自动计算
0, //垂直方向上的缩放系数,留0表示自动计算
cv::INTER_LINEAR); //图像缩放的差值算法类型,这里的是线性插值算法
//把源图像拷贝到目的图像的中央,四面填充指定的像素。图片如果已经拷贝到中间,只填充边界
//TODO 貌似这样做是因为在计算描述子前,进行高斯滤波的时候,图像边界会导致一些问题,说不明白
//EDGE_THRESHOLD指的这个边界的宽度,由于这个边界之外的像素不是原图像素而是算法生成出来的,所以不能够在EDGE_THRESHOLD之外提取特征点
copyMakeBorder(mvImagePyramid[level], //源图像
temp, //目标图像(此时其实就已经有大了一圈的尺寸了)
EDGE_THRESHOLD, EDGE_THRESHOLD, //top & bottom 需要扩展的border大小
EDGE_THRESHOLD, EDGE_THRESHOLD, //left & right 需要扩展的border大小
BORDER_REFLECT_101+BORDER_ISOLATED); //扩充方式,opencv给出的解释:
/*Various border types, image boundaries are denoted with '|'
* BORDER_REPLICATE: aaaaaa|abcdefgh|hhhhhhh
* BORDER_REFLECT: fedcba|abcdefgh|hgfedcb
* BORDER_REFLECT_101: gfedcb|abcdefgh|gfedcba
* BORDER_WRAP: cdefgh|abcdefgh|abcdefg
* BORDER_CONSTANT: iiiiii|abcdefgh|iiiiiii with some specified 'i'
*/
//BORDER_ISOLATED 表示对整个图像进行操作
// https://docs.opencv.org/3.4.4/d2/de8/group__core__array.html#ga2ac1049c2c3dd25c2b41bffe17658a36
}
else
{
//对于底层图像,直接就扩充边界了
//?temp 是在循环内部新定义的,在该函数里又作为输出,并没有使用啊!
copyMakeBorder(image, //这里是原图像
temp, EDGE_THRESHOLD, EDGE_THRESHOLD, EDGE_THRESHOLD, EDGE_THRESHOLD,
BORDER_REFLECT_101);
}
}
}
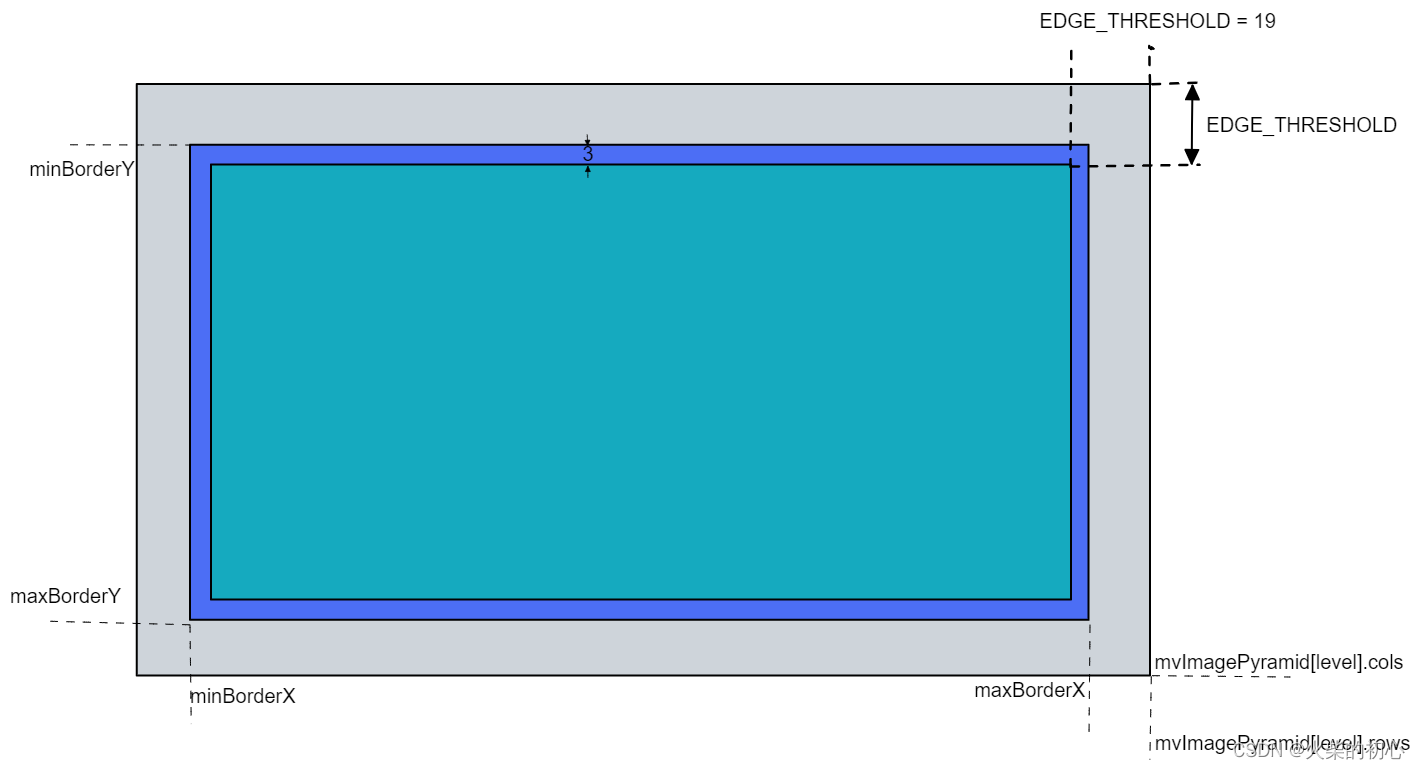
- 对于level = 0
- 对原图像的上下左右扩充
EDGE_THRESHOLD(19)像素
- 对原图像的上下左右扩充
- 对于level !=0
- 对金字塔
level-1层图像进行缩放scale得到level层图像 - 对
level层图像的边界上下左右扩充EDGE_THRESHOLD(19)像素
- 对金字塔
- 实际操作:只对原图像进行了一层一层的缩放
void cv::copyMakeBorder
(
InputArray _src_, //输入图像
OutputArray _dst_,//输出图像
int _top_,//上边界的大小
int _bottom_,//下边界的大小
int _left_,//左边界的大小
int _right_,//右边界的大小
int _borderType_,//边界的类型
const Scalar& _value_ = Scalar()//边界的值
//BORDER_REPLICATE(复制): aaaaaa|abcdefgh|hhhhhhh
//BORDER_REFLECT(镜像): fedcba|abcdefgh|hgfedcb
//BORDER_REFLECT_101(镜像): gfedcb|abcdefgh|gfedcba
//BORDER_WRAP(包裹): cdefgh|abcdefgh|abcdefg
//BORDER_CONSTANT(常量): iiiiii|abcdefgh|iiiiiii with some specified i
)
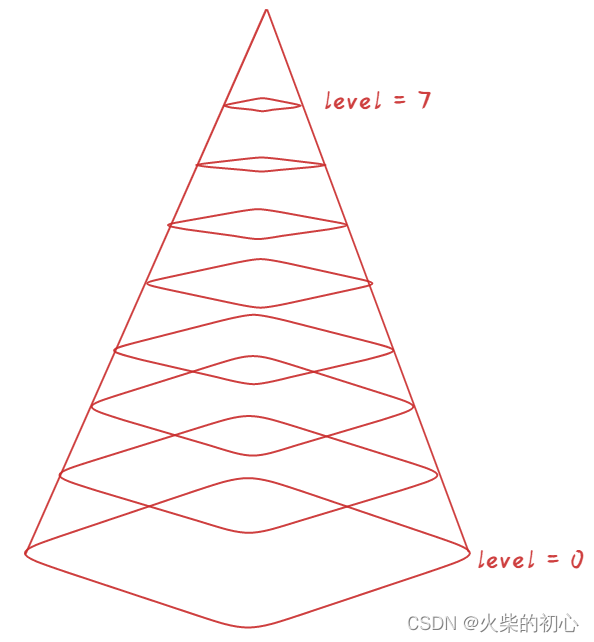
2.提取Fast角点
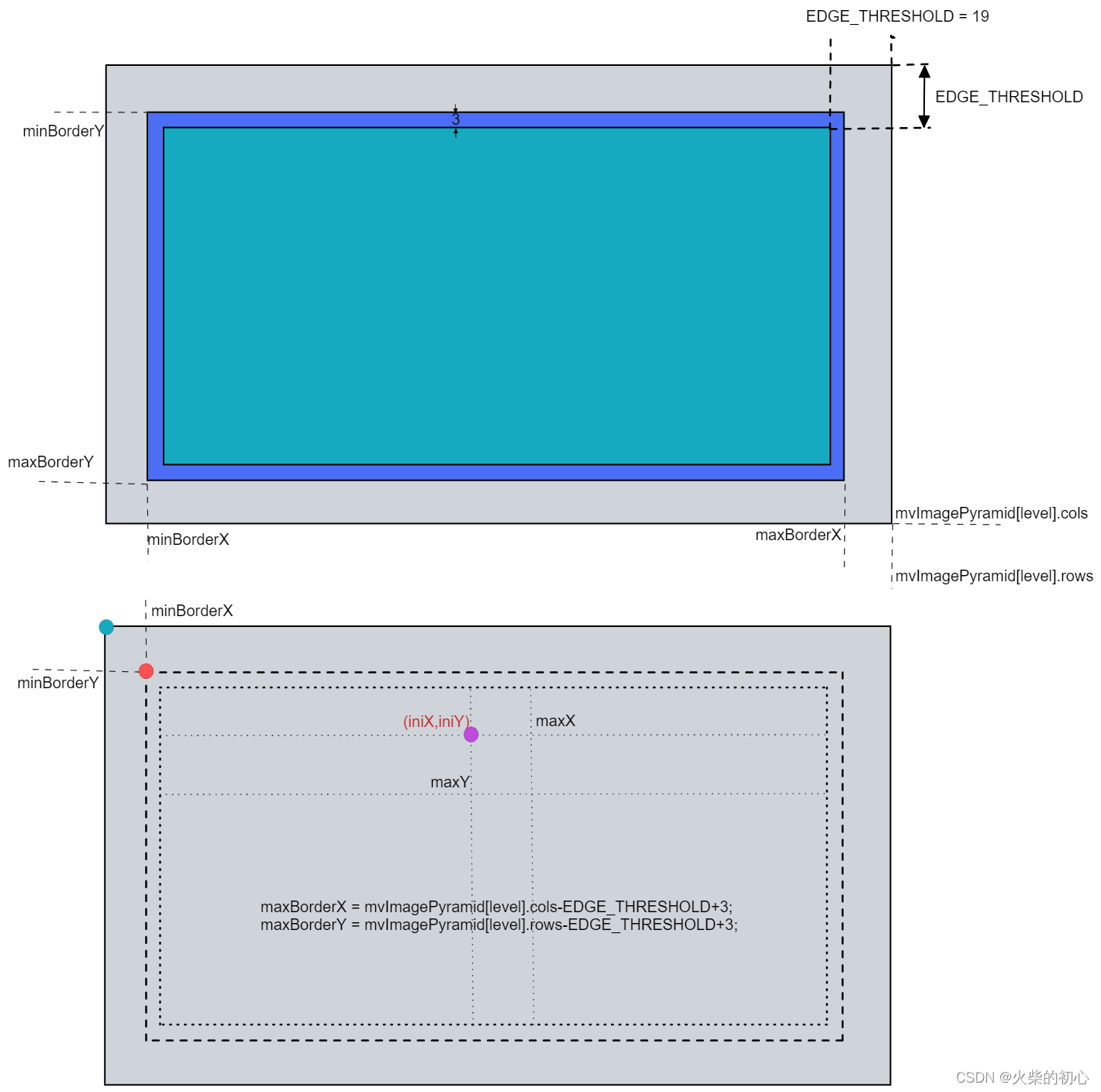
对于金字塔的每一层,将其网格化,每个格子大小为 w = 35 w = 35 w=35:
- 左上角(红色): ( m i n B o r d e r X , m i n B o r d e r Y ) \left(minBorderX, minBorderY\right) (minBorderX,minBorderY)
- 右下角: ( m a x B o r d e r Y , m a x B o r d e r Y ) \left(maxBorderY, maxBorderY\right) (maxBorderY,maxBorderY)
- 网格的行数: r o w s = ( m a x B o r d e r Y − m i n B o r d e r Y ) w rows=\frac{\left(maxBorderY-minBorderY\right)}{w} rows=w(maxBorderY−minBorderY)
- 网格的列数:
c
o
l
s
=
(
m
a
x
B
o
r
d
e
r
X
−
m
i
n
B
o
r
d
e
r
X
)
w
cols=\frac{\left(maxBorderX-minBorderX\right)}{w}
cols=w(maxBorderX−minBorderX)
这时候可以在每个格子中提取Fast角点, 其中格子的范围为: - i n i X = m i n B o r d e r X + j ⋅ w C e l l iniX = minBorderX + j \cdot wCell iniX=minBorderX+j⋅wCell
- i n i Y = m i n B o r d e r Y + i ⋅ h C e l l iniY = minBorderY + i \cdot hCell iniY=minBorderY+i⋅hCell
- m a x X = i n i X + w C e l l + 6 maxX = iniX + wCell + 6 maxX=iniX+wCell+6
-
m
a
x
Y
=
i
n
i
Y
+
h
C
e
l
l
+
6
maxY = iniY + hCell + 6
maxY=iniY+hCell+6
FAST角点在(iniX, iniY, maxX, maxY)范围内提取,这里使用高低阈值
FAST(mvImagePyramid[level].rowRange(iniY,maxY).colRange(iniX,maxX), //待检测的图像,这里就是当前遍历到的图像块
vKeysCell, //存储角点位置的容器
iniThFAST, //检测阈值
true); //使能非极大值抑制
if(vKeysCell.empty())
{
//那么就使用更低的阈值来进行重新检测
FAST(mvImagePyramid[level].rowRange(iniY,maxY).colRange(iniX,maxX), //待检测的图像
vKeysCell, //存储角点位置的容器
minThFAST, //更低的检测阈值
true); //使能非极大值抑制
}
提取到的角点的原点位于紫色,需要将其变换到红色
x
=
x
+
j
⋅
w
C
e
l
l
y
=
y
+
i
⋅
h
C
e
l
l
\begin{array}{c} x = x + j \cdot wCell \\ y = y + i \cdot hCell \end{array}
x=x+j⋅wCelly=y+i⋅hCell
2.四叉树均匀化
四叉树的节点如下:
class ExtractorNode
{
public:
ExtractorNode():bNoMore(false){}
void DivideNode(ExtractorNode &n1, ExtractorNode &n2, ExtractorNode &n3, ExtractorNode &n4);
std::vector<cv::KeyPoint> vKeys //该节点下的特征点;
cv::Point2i UL, UR, BL, BR //上下左右边界;
std::list<ExtractorNode>::iterator lit //迭代器,指向自己;
bool bNoMore //当特征点数量为1是,不可再分裂;
};
步骤:
- 根据
宽高比例计算初始的节点数 - 根据节点数生成初始化节点
- 将特征点分配到对应的节点中(
kp.pt.x/hX) - 对于初始化节点,标记那些不能分裂的,删除那些空的节点
- 记录状态:
- preSize: 当前节点特征点的数量
- nToExpand: 需要分裂的节点数
- vSizeAndPointerToNode: 可分裂的节点的指针及其特征点数
- 分裂
- 添加子节点
- 将
可分裂的子节点加入到可分裂的节点中 - 特征点数量等于1的标记为不可分裂节点
- 删除当前节点
- 结束条件:
- 当前的节点数已经超过了要求的特征点数
- 当前所有的节点都不再分了
- 对于: 当前节点数 + 即将分裂的节点数 * 3 > N
- 对即将分裂的节点数按照特征点数量的多少进行
排序 - 按照
特征点数量多的节点先分裂的原则进行分裂 - 如果分裂过程中,满足
结束条件,则立即结束。
- 对即将分裂的节点数按照特征点数量的多少进行
- 非极大值抑制
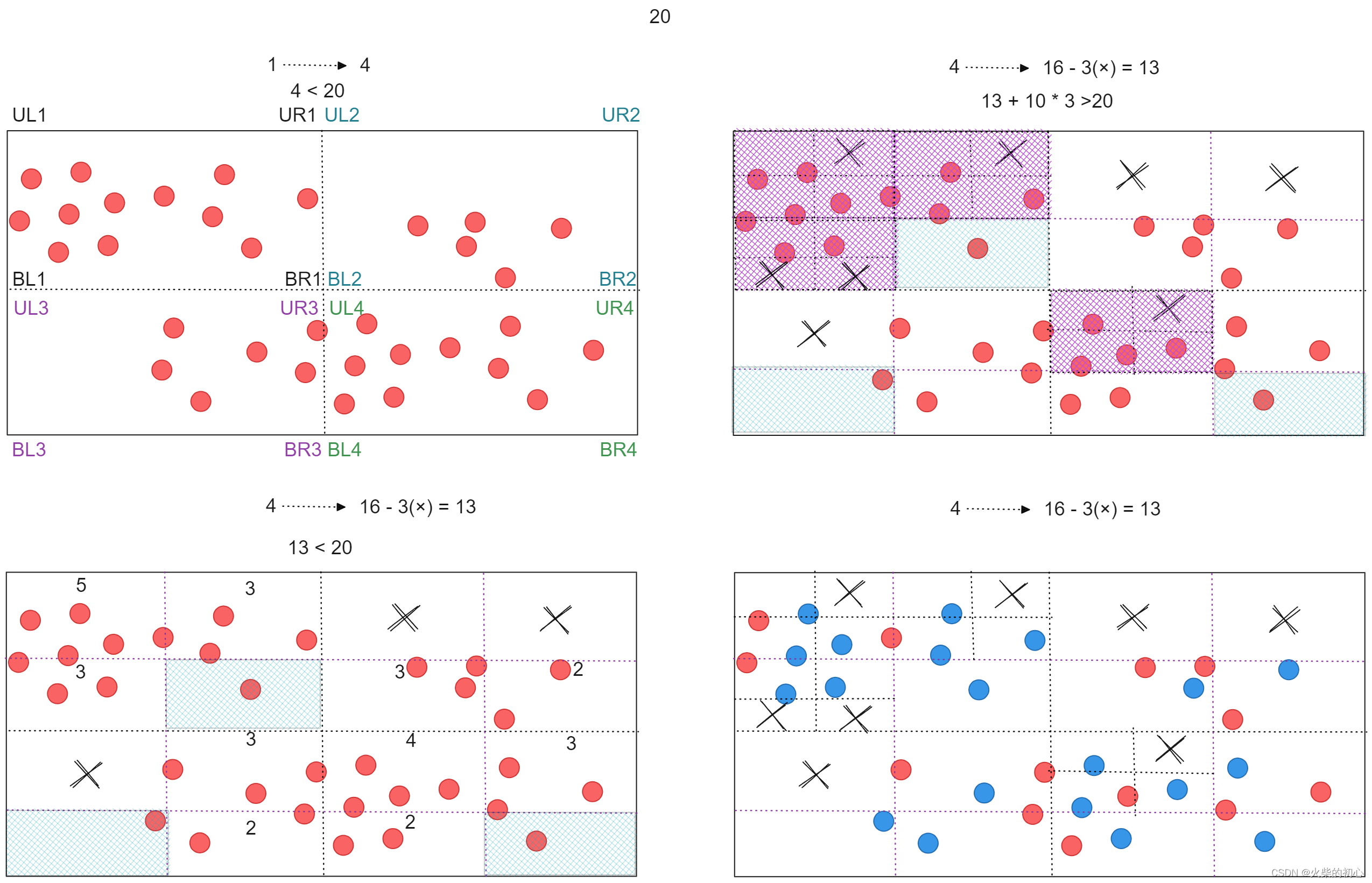
示例:目标特征点数(20)
- 一个初始节点分为4个子节点
- 4个节点分裂为16个子节点,其中:
- 3个子节点中无特征点,删除;
- 3个子节点中只有一个特征点,标记为不可分
- 剩余10个子节点,添加到
可分裂的节点中
- 13个节点 + 10个可分节点 * 3 > 20
- 对10个可分节点排序
- 当节点数达到20,停止
- 对每个节点进行非极大值抑制,选取响应最大的特征点作为该节点最终特征点
在四叉树均匀化后,将特征点坐标变换到青色
x
=
x
+
m
i
n
B
o
r
d
e
r
X
y
=
y
+
m
i
n
B
o
r
d
e
r
Y
\begin{array}{c} x = x + minBorderX \\ y = y + minBorderY \end{array}
x=x+minBorderXy=y+minBorderY
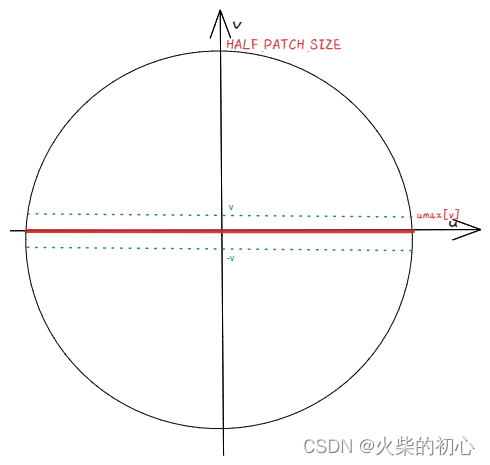
3.计算特征点方向
遍历所有金字塔层,计算当前金字塔层所有特征点的方向,步骤:
- 计算图像在x, y方向的矩
m 10 = ∑ x = − R R ∑ y = − R R x I ( x , y ) m 01 = ∑ x = − R R ∑ y = − R R y I ( x , y ) m 00 = ∑ x = − R R ∑ y = − R R I ( x , y ) \begin{array}{l} m_{10}=\sum_{x=-R}^{R} \sum_{y=-R}^{R} x I(x, y) \\ m_{01}=\sum_{x=-R}^{R} \sum_{y=-R}^{R} y I(x, y) \\ m_{00}=\sum_{x=-R}^{R} \sum_{y=-R}^{R} I(x, y) \end{array} m10=∑x=−RR∑y=−RRxI(x,y)m01=∑x=−RR∑y=−RRyI(x,y)m00=∑x=−RR∑y=−RRI(x,y) - 图像的质心为:
C = ( c x , c y ) = ( m 10 m 00 , m 01 m 00 ) C=\left(c_{x}, c_{y}\right)=\left(\frac{m_{10}}{m_{00}}, \frac{m_{01}}{m_{00}}\right) C=(cx,cy)=(m00m10,m00m01) - 旋转角度:
θ = arctan 2 ( c y , c x ) = arctan 2 ( m 01 , m 10 ) \theta=\arctan 2\left(c_{y}, c_{x}\right)=\arctan 2\left(m_{01}, m_{10}\right) θ=arctan2(cy,cx)=arctan2(m01,m10)
static float IC_Angle(const Mat& image, Point2f pt, const vector<int> & u_max)
{
//图像的矩,前者是按照图像块的y坐标加权,后者是按照图像块的x坐标加权
int m_01 = 0, m_10 = 0;
//获得这个特征点所在的图像块的中心点坐标灰度值的指针center
const uchar* center = &image.at<uchar> (cvRound(pt.y), cvRound(pt.x));
// Treat the center line differently, v=0
//这条v=0中心线的计算需要特殊对待
//由于是中心行+若干行对,所以PATCH_SIZE应该是个奇数
for (int u = -HALF_PATCH_SIZE; u <= HALF_PATCH_SIZE; ++u)
//注意这里的center下标u可以是负的!中心水平线上的像素按x坐标(也就是u坐标)加权
m_10 += u * center[u];
// Go line by line in the circular patch
//这里的step1表示这个图像一行包含的字节总数。参考[https://blog.csdn.net/qianqing13579/article/details/45318279]
int step = (int)image.step1();
//注意这里是以v=0中心线为对称轴,然后对称地每成对的两行之间进行遍历,这样处理加快了计算速度
for (int v = 1; v <= HALF_PATCH_SIZE; ++v)
{
// Proceed over the two lines
//本来m_01应该是一列一列地计算的,但是由于对称以及坐标x,y正负的原因,可以一次计算两行
int v_sum = 0;
// 获取某行像素横坐标的最大范围,注意这里的图像块是圆形的!
int d = u_max[v];
//在坐标范围内挨个像素遍历,实际是一次遍历2个
// 假设每次处理的两个点坐标,中心线下方为(x,y),中心线上方为(x,-y)
// 对于某次待处理的两个点:m_10 = Σ x*I(x,y) = x*I(x,y) + x*I(x,-y) = x*(I(x,y) + I(x,-y))
// 对于某次待处理的两个点:m_01 = Σ y*I(x,y) = y*I(x,y) - y*I(x,-y) = y*(I(x,y) - I(x,-y))
for (int u = -d; u <= d; ++u)
{
//得到需要进行加运算和减运算的像素灰度值
//val_plus:在中心线下方x=u时的的像素灰度值
//val_minus:在中心线上方x=u时的像素灰度值
int val_plus = center[u + v*step], val_minus = center[u - v*step];
//在v(y轴)上,2行所有像素灰度值之差
v_sum += (val_plus - val_minus);
//u轴(也就是x轴)方向上用u坐标加权和(u坐标也有正负符号),相当于同时计算两行
m_10 += u * (val_plus + val_minus);
}
//将这一行上的和按照y坐标加权
m_01 += v * v_sum;
}
//为了加快速度还使用了fastAtan2()函数,输出为[0,360)角度,精度为0.3°
return fastAtan2((float)m_01, (float)m_10);
}
注意: 矩的计算方式
矩在圆中以行的方式进行计算,首先计算v=0行,上下两行中对应的点为
(
x
,
y
)
(x, y)
(x,y)与
(
x
,
−
y
)
(x, -y)
(x,−y),则矩为:
m
10
=
∑
x
I
(
x
,
y
)
=
x
I
(
x
,
y
)
+
x
I
(
x
,
−
y
)
=
x
(
I
(
x
,
y
)
+
I
(
x
,
−
y
)
)
m
01
=
∑
y
I
(
x
,
y
)
=
y
I
(
x
,
y
)
−
y
I
(
x
,
−
y
)
=
y
(
I
(
x
,
y
)
−
I
(
x
,
−
y
)
)
\begin{align} m_{10} & = \sum xI(x,y) \\ & = xI(x,y) + xI(x,-y) \\ & = x(I(x,y) + I(x,-y)) \\ m_{01} & = \sum yI(x,y) \\ & = yI(x,y) - yI(x,-y) \\ & = y(I(x,y) - I(x,-y)) \end{align}
m10m01=∑xI(x,y)=xI(x,y)+xI(x,−y)=x(I(x,y)+I(x,−y))=∑yI(x,y)=yI(x,y)−yI(x,−y)=y(I(x,y)−I(x,−y))
4.计算特征点的描述子
遍历所有金字塔层,计算当前金字塔层所有特征点的描述子,步骤:
- 高斯模糊
- 旋转
Q θ = R θ Q \boldsymbol{Q}_{\theta}=\boldsymbol{R}_{\theta} \boldsymbol{Q} Qθ=RθQ - 计算描述子
Q θ = ( x 1 , x 2 , ⋯ , x m − 1 , x m y 1 , y 2 , ⋯ , y m − 1 y m ) \boldsymbol{Q_{\theta}}=\left(\begin{array}{c} x_{1}, x_{2}, \cdots, x_{m-1}, x_{m} \\ y_{1}, y_{2}, \cdots, y_{m-1} y_{m} \end{array}\right) Qθ=(x1,x2,⋯,xm−1,xmy1,y2,⋯,ym−1ym)
选取32组点对,每组点对包含16个点,两两相互比较,生成8位,所以描述子维度:
32
⋅
8
=
256
32\cdot8=256
32⋅8=256
static void computeOrbDescriptor(const KeyPoint& kpt,
const Mat& img, const Point* pattern,
uchar* desc)
{
//得到特征点的角度,用弧度制表示。kpt.angle是角度制,范围为[0,360)度
float angle = (float)kpt.angle*factorPI;
//然后计算这个角度的余弦值和正弦值
float a = (float)cos(angle), b = (float)sin(angle);
//获得图像中心指针
const uchar* center = &img.at<uchar>(cvRound(kpt.pt.y), cvRound(kpt.pt.x));
//获得图像的每行的字节数
const int step = (int)img.step;
//原始的BRIEF描述子不具有方向信息,通过加入特征点的方向来计算描述子,称之为Steer BRIEF,具有较好旋转不变特性
//具体地,在计算的时候需要将这里选取的随机点点集的x轴方向旋转到特征点的方向。
//获得随机“相对点集”中某个idx所对应的点的灰度,这里旋转前坐标为(x,y), 旋转后坐标(x',y')推导:
// x'= xcos(θ) - ysin(θ), y'= xsin(θ) + ycos(θ)
#define GET_VALUE(idx) center[cvRound(pattern[idx].x*b + pattern[idx].y*a)*step + cvRound(pattern[idx].x*a - pattern[idx].y*b)]
// y'* step
// x'
//brief描述子由32*8位组成
//其中每一位是来自于两个像素点灰度的直接比较,所以每比较出8bit结果,需要16个随机点,这也就是为什么pattern需要+=16的原因
for (int i = 0; i < 32; ++i, pattern += 16)
{
int t0, //参与比较的一个特征点的灰度值
t1, //参与比较的另一个特征点的灰度值
val; //描述子这个字节的比较结果
t0 = GET_VALUE(0); t1 = GET_VALUE(1);
val = t0 < t1; //描述子本字节的bit0
t0 = GET_VALUE(2); t1 = GET_VALUE(3);
val |= (t0 < t1) << 1; //描述子本字节的bit1
t0 = GET_VALUE(4); t1 = GET_VALUE(5);
val |= (t0 < t1) << 2; //描述子本字节的bit2
t0 = GET_VALUE(6); t1 = GET_VALUE(7);
val |= (t0 < t1) << 3; //描述子本字节的bit3
t0 = GET_VALUE(8); t1 = GET_VALUE(9);
val |= (t0 < t1) << 4; //描述子本字节的bit4
t0 = GET_VALUE(10); t1 = GET_VALUE(11);
val |= (t0 < t1) << 5; //描述子本字节的bit5
t0 = GET_VALUE(12); t1 = GET_VALUE(13);
val |= (t0 < t1) << 6; //描述子本字节的bit6
t0 = GET_VALUE(14); t1 = GET_VALUE(15);
val |= (t0 < t1) << 7; //描述子本字节的bit7
//保存当前比较的出来的描述子的这个字节
desc[i] = (uchar)val;
}//通过对随机点像素灰度的比较,得出BRIEF描述子,一共是32*8=256位
//为了避免和程序中的其他部分冲突在,在使用完成之后就取消这个宏定义
#undef GET_VALUE
}
B.对提取的特征点进行矫正
void cv::undistortPoints
(
InputArray _src_//观察点坐标 2xN/Nx2 1-channel or 1xN/Nx1 2-channel (CV_32FC2 or CV_64FC2) (or vector<Point2f> )
OutputArray _dst_//矫正后的坐标 1xN/Nx1 2-channel or vector<Point2f>
InputArray _cameraMatrix_ //相机内参
InputArray _distCoeffs_ //相机畸变矩阵
InputArray _R_ = noArray //新的变换矩阵
InputArray _P_ = noArray //新的相机矩阵或者投影矩阵
)
C.将特征点分配到网格中
将特征点分配到网格中主要的作用:加速特征点的搜索
FRAME_GRID_ROWS:48FRAME_GRID_COLS:64
p o s X = ( x − m n M i n X ) ⋅ F R A M E _ G R I D _ C O L S m n M a x X − m n M i n X p o s Y = ( y − m n M i n Y ) ⋅ F R A M E _ G R I D _ R O W S m n M a x Y − m n M i n Y \begin{align} posX & = \left (x-mnMinX\right )\cdot \frac{ {\small FRAME\_GRID\_COLS} }{mnMaxX-mnMinX} \\ posY & = \left (y-mnMinY\right )\cdot \frac{ {\small FRAME\_GRID\_ROWS} }{mnMaxY-mnMinY} \end{align} posXposY=(x−mnMinX)⋅mnMaxX−mnMinXFRAME_GRID_COLS=(y−mnMinY)⋅mnMaxY−mnMinYFRAME_GRID_ROWS






![[Nacos] Nacos Server处理订阅请求 (九)](https://img-blog.csdnimg.cn/defdfab6f1944a388340ff063ffce63a.png)