目录
前言:
一、中断优先级设置
二、中断相关寄存器(STM32-Cortex M3)
三、临界段代码保护
四、任务调度器的挂起和恢复
总结:
前言:
博客笔记根据正点原子视频教程编辑,仅供学习交流使用!
一、中断优先级设置
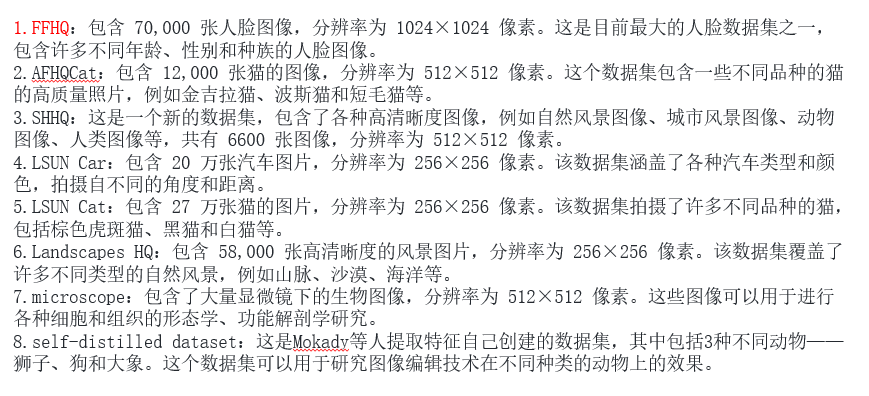
①中断概念回顾
让CPU打断正常运行的程序,转而去处理紧急的事件(程序),就叫中断。可简单概括为以下三步:
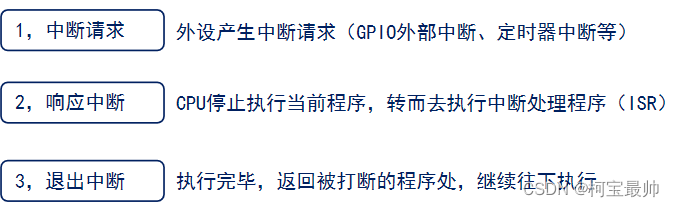
② 优先级分组设置
ARM Cortex-M 使用了 8 位宽的寄存器(256级)来配置中断的优先等级,这个寄存器就是中断优先级配置寄存器。但STM32,只用了中断优先级配置寄存器的高4位 [7 : 4],所以STM32提供了最大16级的中断优先等级。
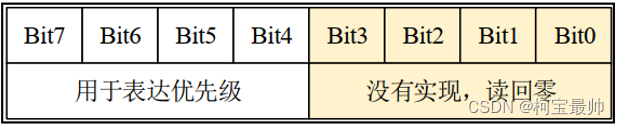
STM32 的中断优先级可以分为抢占优先级和子优先级。抢占优先级: 抢占优先级高的中断可以打断正在执行但抢占优先级低的中断。子优先级:当同时发生具有相同抢占优先级的两个中断时,子优先级数值小的优先执行。(中断优先级数值越小越优先)
优先级的设置有5 种分配方式,对应着中断优先级分组的 5 个组,通过在在HAL_Init()中调用函数HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4)即可完成设置(FreeRTOS中常用NVIC_PriorityGroup_4):
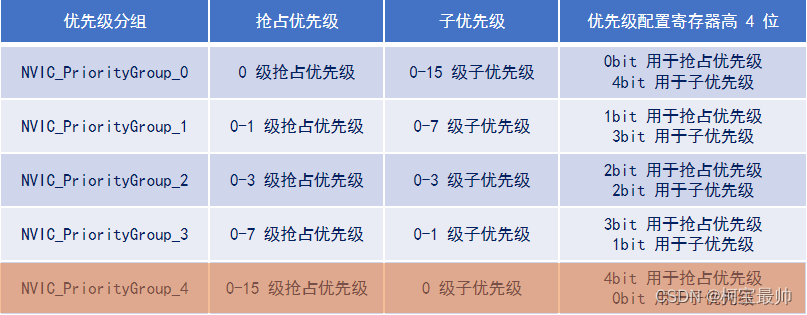
注意:低于5级优先级的中断里才可调用FreeRTOS的API函数。在FreeRTOS中常把4位都设置为抢占优先级即NVIC_PriorityGroup_4。中断优先级数值越小越优先,任务优先级数值越大越优先。
二、中断相关寄存器(STM32-Cortex M3)
①三个系统中断优先级配置寄存器
一个寄存器是32位的,它的地址是这一段区域的首地址(8位),要设置一个寄存器区域的非首地址(如PendSV和SysTick),通过首地址偏移bit即可。
SHPR1寄存器地址:0xE000ED1
SHPR2寄存器地址:0xE000ED1C
SHPR3寄存器地址:0xE000ED20
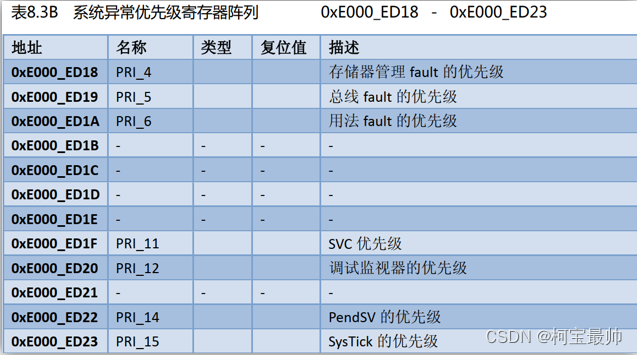
注意:PendSV和SysTick设置最低优先级,保证系统任务切换不会阻塞系统其他中断的响应。即中断可打断任务,但任务不可打断中断。
②三个中断屏蔽寄存器
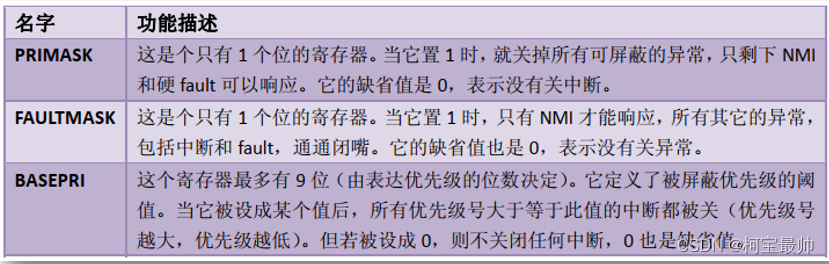
注意:FreeRTOS利用的BASEPRI这个寄存器完成对中断的管理。该寄存器屏蔽优先级低于某个阈值(或优先级号大于某个值)的中断,如BASEPRI设置为0x50(配置优先级只用到低4位,只用到高四位[7:4],所以这里写的是5向左偏移4位的值),代表中断优先级在5~15内的均被屏蔽,0~4的中断优先级正常执行。当BASEPRI设置为0,不关闭任何中断(不是屏蔽所有中断的意思)。
关闭中断优先级在5-15的中断程序示例:
#define portDISABLE_INTERRUPTS() vPortRaiseBASEPRI()
static portFORCE_INLINE void vPortRaiseBASEPRI( void )
{
uint32_t ulNewBASEPRI = configMAX_SYSCALL_INTERRUPT_PRIORITY;
__asm
{
msr basepri, ulNewBASEPRI
dsb
isb
}
}
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
/*STM32中断优先级只用高4位配置,偏移4位*/
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
/* FreeRTOS可管理的最高中断优先级 ,也即把BASEPRI设置为0x50*/

FreeRTOS说:“我可以中断你,可以让你用我的API函数;我不能中断你,你也不能用我的API函数!”
注意:中断服务函数的优先级需在FreeRTOS所管理的范围内;中断服务函数里边需调用FreeRTOS的API函数,必须使用带“FromISR”后缀的函数。
开中断代码示例(即BASEPRI设置为0):
#define portENABLE_INTERRUPTS() vPortSetBASEPRI( 0 )
static portFORCE_INLINE void vPortSetBASEPRI( uint32_t ulBASEPRI )
{
__asm
{
msr basepri, ulBASEPRI
}
}
三、临界段代码保护
临界段代码:也叫做临界区,是指那些必须完整运行,不能被打断的代码段。
使用场合:①外设:需严格按照时序初始化的外设,如I2C、SPI等。②系统在自身需求。③用户的某些需求。
能够打断当前程序运行的:中断、任务调度(PendSV相关)。要想程序不被打断,关中断即可(指FreeRTOS所管辖的最高级别中断),因为PendSV是与任务切换有关的一个中断,被设置成了最低优先级,所以关中断后,PendSV(与任务调度器有关)也一定不会响应。
FreeRTOS 在进入临界段代码的时候需要关闭中断,当处理完临界段代码以后再打开中断!

无论是任务级还是中断级临界区本质都是关中断,代码是成对使用的,且支持嵌套,可尽量保持临界段耗时短:
//任务级临界区调用格式示例
taskENTER_CRITICAL() ;
{
… … /* 临界区 */
}
taskEXIT_CRITICAL() ;
//中断级临界区调用格式示例(这段写在中断服务函数里)
uint32_t save_status;
save_status = taskENTER_CRITICAL_FROM_ISR();
{
… … /* 临界区 */
}
taskEXIT_CRITICAL_FROM_ISR(save_status );四、任务调度器的挂起和恢复
调用挂起任务调度器的函数时不需要关闭中断;仅仅是防止了任务之间的资源争夺,中断照样可以直接响应。
挂起调度器的方式,适用于临界区位于任务与任务之间;既不用去延时中断,又可以做到临界区的安全。

vTaskSuspendAll() ;
{
… … /* 内容 */
}
xTaskResumeAll() ;总结:
实时操作系统是嵌入式学习的进阶内容,掌握好在面试时会有巨大优势!

往期精彩:
电机应用控制——直流无刷电机
OpenCV机器视觉系列专栏
C语言进阶