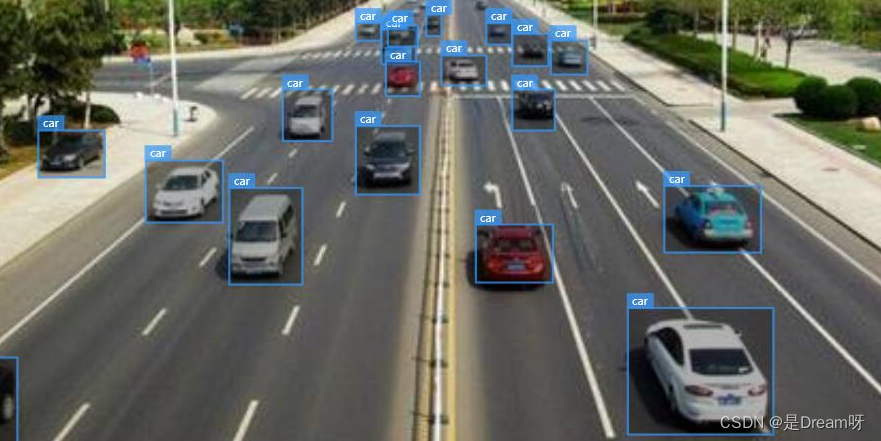
前言:Hello大家好,我是Dream。 自动驾驶是当前最热门的技术之一,而道路识别则是自动驾驶系统中的重要一环。它需要自动驾驶车辆能够识别和解读道路标志、路面标线、交通信号灯等道路条件,及时准确地做出驾驶决策。接下来Dream将带大家去了解如何实现道路识别。
1. 收集数据
道路识别的数据收集是一个耗时而繁琐的过程,但它是训练准确和可靠的模型所必须的。收集可以通过以下三种方式之一实现:
1.1. 手动标注
手动标注是一种传统的方式,需要人工按照一定的标准对所拍摄的图片进行标注。在道路识别中,标注通常包括道路、不同类型的车辆、行人和建筑物等的轮廓。
1.2. 摄像头
摄像头是收集道路识别数据的最常见方法。你可以在车辆的前后或侧面安装相机,拍摄特定路段的视频,然后使用视频中的帧作为图像数据。
1.3. 自动驾驶车辆的传感器
自动驾驶车辆通常使用多种传感器,如激光雷达、Infrared阵列、摄像头、GPS和惯性测量单元(IMU)等,以收集其周围环境的数据。这些数据可以作为道路识别的训练数据。

2. 数据预处理
在训练道路识别模型之前,需要对收集的数据进行预处理和清理。这种预处理包括以下步骤:
- 标准化:将图像的尺寸和颜色范围标准化,以便它们可以与模型匹配。
- 剪裁:将图像裁剪到感兴趣的区域,如道路和天空,以减少数据量。
- 标记:使用手动标注或图像分割算法标记图像,以指定图像中的道路区域。
- 数据扩充:使用数据扩充技术,如平移、旋转、翻转和缩放等,生成更多的训练数据。
3. 模型选择和训练
选择和训练道路识别模型是实现道路识别的关键步骤。常见的模型包括卷积神经网络CNN、递归神经网络RNN和卷积递归神经网络CRNN等。
在选择模型时,我们需要考虑以下几个因素:
- 是否适用于道路识别任务
- 训练难度和时间成本
- 是否具有可扩展性和可优化性
- 是否具有良好的性能
3.1. 卷积神经网络
CNN是道路识别中最常用的模型之一,其优势在于可以自动从原始图像中提取特征。CNN由多层卷积层、激活函数层、池化层和全连接层组成。在训练时,CNN可以利用梯度下降等优化算法来自动优化其参数。
import tensorflow as tf
# 定义输入层
input_layer = tf.keras.layers.Input(shape=(28, 28, 1))
# 定义卷积层
conv1 = tf.keras.layers.Conv2D(32, kernel_size=(3, 3), activation='relu')(input_layer)
conv2 = tf.keras.layers.Conv2D(64, kernel_size=(3, 3), activation='relu')(conv1)
# 定义池化层
pool1 = tf.keras.layers.MaxPooling2D(pool_size=(2, 2))(conv2)
flatten = tf.keras.layers.Flatten()(pool1)
# 定义全连接层
dense1 = tf.keras.layers.Dense(128, activation='relu')(flatten)
output_layer = tf.keras.layers.Dense(10, activation='softmax')(dense1)
# 定义模型
model = tf.keras.models.Model(inputs=input_layer, outputs=output_layer)
# 编译模型
model.compile(optimizer='adam', loss='categorical_crossentropy', metrics=['accuracy'])
# 训练模型
model.fit(train_images, train_labels, epochs=10, validation_data=(test_images, test_labels))
在上述代码中,我们先定义了输入层。然后,我们定义两个卷积层和一个池化层。接下来,我们将池化层的输出展开,并添加两个全连接层,最后添加一个输出层。我们使用model = tf.keras.models.Model(inputs=input_layer, outputs=output_layer)定义模型,然后使用model.compile(optimizer=‘adam’, loss=‘categorical_crossentropy’, metrics=[‘accuracy’])编译模型。最后,我们使用model.fit(train_images, train_labels, epochs=10, validation_data=(test_images, test_labels))训练模型。
3.2. 重复神经网络
与CNN不同,RNN是专门用于处理序列型数据的模型。它可以处理历史数据与当前数据的依赖关系,并输出相应的预测结果。在道路识别中,RNN可以用于预测地图、速度和行驶路线等。
重复神经网络是一种特殊的神经网络,它的结构中包含重复的神经元层。这些层在时间上是相同的,且神经元之间的连接也是相同的。重复神经网络主要用于处理序列数据,如语音识别、自然语言处理和时间序列预测。
import tensorflow as tf
# 定义重复神经网络的输入
input_data = tf.placeholder(tf.float32, [None, max_sequence_length, num_input_features])
# 定义重复神经网络的参数
num_hidden_units = 32
num_layers = 2
cell_type = 'GRU'
# 定义重复神经网络的单元类型
if cell_type == 'LSTM':
cell = tf.contrib.rnn.BasicLSTMCell(num_hidden_units)
elif cell_type == 'GRU':
cell = tf.contrib.rnn.GRUCell(num_hidden_units)
else:
cell = tf.contrib.rnn.BasicRNNCell(num_hidden_units)
# 定义重复神经网络的多层结构
cells = []
for _ in range(num_layers):
cells.append(tf.contrib.rnn.DropoutWrapper(cell, output_keep_prob=0.5))
multi_layer_cell = tf.contrib.rnn.MultiRNNCell(cells)
# 定义重复神经网络的输出
outputs, final_state = tf.nn.dynamic_rnn(multi_layer_cell, input_data, dtype=tf.float32)
# 定义重复神经网络的损失函数和优化器
loss = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(logits=output, labels=target))
optimizer = tf.train.AdamOptimizer().minimize(loss)
上述代码创建了一个包含两个GRU层的重复神经网络。我们使用dynamic_rnn函数实现了网络的前向传播和状态更新。在此基础上,我们定义了损失函数和优化器来训练网络。
3.3. 卷积递归神经网络
CRNN是CNN和RNN的组合,它利用CNN的优势来提取图像特征,并使用RNN来处理序列信息。在道路识别中,CRNN可以用于预测道路结构和交通状况等。
卷积递归神经网络(CRNN)是一种深度神经网络,结合了卷积神经网络(CNN)和循环神经网络(RNN)的特性。它在处理序列数据时表现出色,例如语音识别、语言翻译和文字识别等领域。
以下是CRNN的基本结构:
1.卷积层: CRNN的第一层通常是CNN的卷积层,用于从输入数据中提取特征。卷积核的大小和数量可以根据任务的不同而变化。
2.循环层: 在卷积层之后,CRNN会使用RNN层来处理序列数据。这些层可以是简单的循环层(如LSTM或GRU)或堆叠的多个循环层。
3.池化层: 池化层通常放置在卷积和循环层之间,它可以缩小特征图的大小,减少模型的计算量。常用的池化方式有最大池化和平均池化。
4.全连接层:最后一层是全连接层,用于将所有的特征连接在一起,并生成最终的预测输出。
以下是CRNN的训练过程:
1.数据预处理:将输入数据转换成适合网络处理的格式,例如Mel频谱图或MFCC特征向量。
2.定义损失函数:根据任务的不同,可以选择不同的损失函数,例如交叉熵、均方误差或CTC(连接时序分类)损失等。
3.反向传播:使用反向传播算法更新网络参数,以最小化损失函数。
4.验证和测试:使用验证集和测试集评估模型的性能,可以使用准确率、F1分数或ROC曲线等指标来评估模型的性能。
CRNN是一种非常强大的神经网络结构,可以在序列数据处理任务中产生非常好的结果。但是,它需要大量的训练数据和计算资源来训练和优化。
4. 模型评估和调优
在进行测试和评估时,我们需要将测试集输入到模型中,获取模型对道路图像的分类结果。然后通过计算预测结果与实际结果之间的差异,来评估模型的分类效果。常用的评估指标有准确度、精确度、召回率、F1值等。
4.1. 准确度
准确度是道路识别中最常用的评估指标。它可以简单地计算模型的正确预测率。
4.2. 精确度和召回率
精确度和召回率是评估分类问题的重要指标。精确度考察了预测为正的样本中真正的正样本的比例,而召回率考察了正样本的全部比例。
精确度是指分类器正确预测为正例的样本数占所有预测为正例的样本数的比例。计算公式为:
精确度 = 预测为正例且真实为正例的样本数 / 所有预测为正例的样本数
召回率是指分类器正确预测为正例的样本数占真实正例样本数的比例。计算公式为:
召回率 = 预测为正例且真实为正例的样本数 / 所有真实正例样本数
通常情况下,我们希望精确度和召回率都越高越好。但是在某些情况下,精确度和召回率之间可能存在折衷(trade-off),即提高精确度可能会降低召回率,反之亦然。### 4.3. F1得分
F1得分是精确度和召回率的调和平均值。它综合考虑了精确度和召回率,并在实际应用中广泛使用。
5. 模型部署
在对模型进行评估并调整之后,需要将模型部署到真实场景中。这可能包括将模型嵌入到自动驾驶车辆或手机应用程序中,以便实时进行道路识别和相关决策。
结论: 总的来说,道路识别需要收集大量的数据,对其进行预处理和清洗,选择和训练适当的模型,并对其进行评估和调优。
本期推荐:
Java诞生28年来,这本享誉全球的 Java 经典著作《Core Java》一路伴随着 Java 的成长,得到了百万 Java 开发者的青睐,成为一本畅销不衰的Java经典图书,影响了几代技术人。
最新版中文版《Java核心技术(原书第12版)经全面修订,以涵盖Java 17的新特性。新版延续之前版本的优良传统,用数百个实际的工程案例,全面系统地讲解了Java语言的核心概念、语法、 重要特性、 开发方法。
着力让读者在充分理解Java语言和Java类库的基础上,灵活应用Java提供的高级特性,具体包括面向对象程序设计、反射与代理、接口与内部类、异常处理、泛型程序设计、集合框架、事件监听器模型、图形用户界面设计和并发。

抽奖方式:评论区随机抽取4位小伙伴免费送出
参与方式:关注博主、点赞、收藏、评论区评论“人生苦短,我爱Dream!”(切记要点赞+收藏,否则抽奖无效,每个人最多评论三次!)
活动截止时间:2023-05-31 20:00:00