⛄一、运动编码粒子群算法简介
1 粒子群算法
PSO算法是一种基于群体智能的随机优化方法。在PSO中,粒子群模拟鸟群行为在搜索空间中探索(全局搜索)和开发(局部搜索),最终找到全局最优解。粒子的速度和位置更新方程如公式(11)、公式(12)所示:

其中,k表示第k代,lbk是自身历史最优位置,gbk是群体最佳位置,ω是惯性权重,c1和c2分别是个体认知系数和社会引导系数,r1和r2是从[0,1]内采样的两个均匀概率分布的随机序列。
2 运动编码粒子群算法
运动编码粒子群算法MPSO保留了PSO的更新机制,但相对于笛卡尔空间,MPSO允许粒子在运动空间中搜索,将粒子移动限制在其相邻单元,从而保证路径中相邻节点之间的距离在无人机移动能力范围内,保持路径节点的可达性,使得每一代进化后的路径总是有效的。
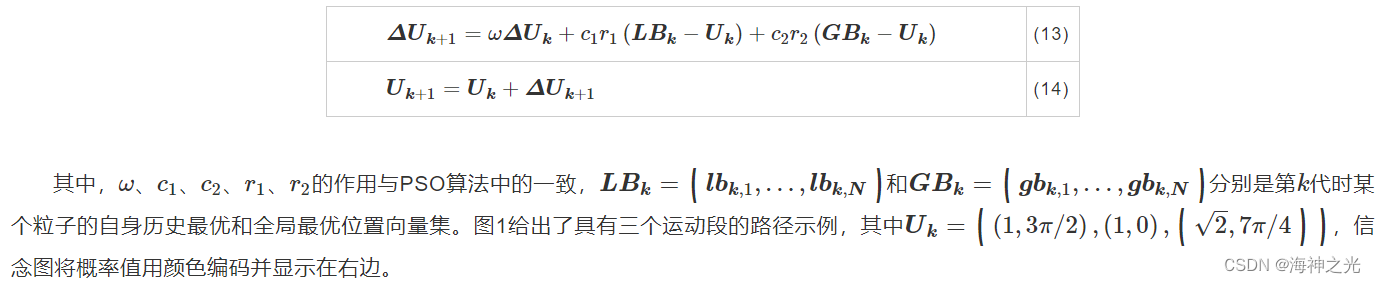
MPSO将每条搜索路径视为一组无人机运动段,若定义t时某运动段的大小和方向分别为ρt和αt,该运动段则为ut=(ρt,αt),从而搜索路径为向量集Uk=(uk,1,…,uk,N)。使用Uk作为每个粒子的位置,则MPSO的更新方程如公式(13)和公式(14)所示:
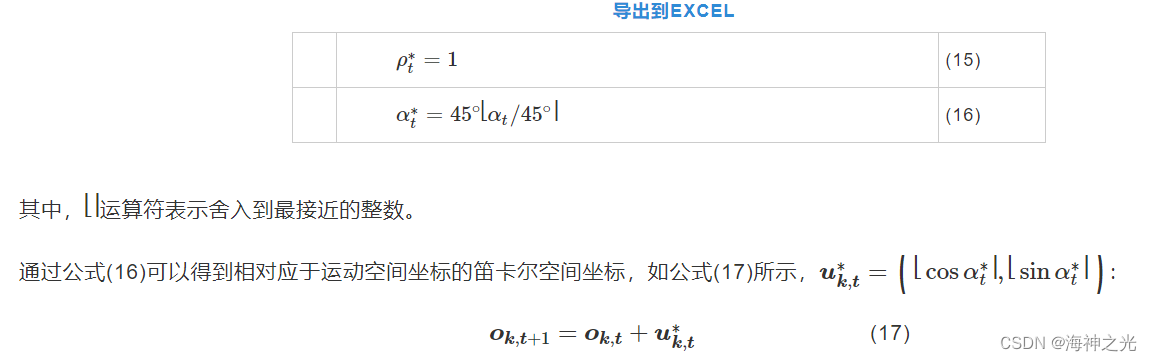
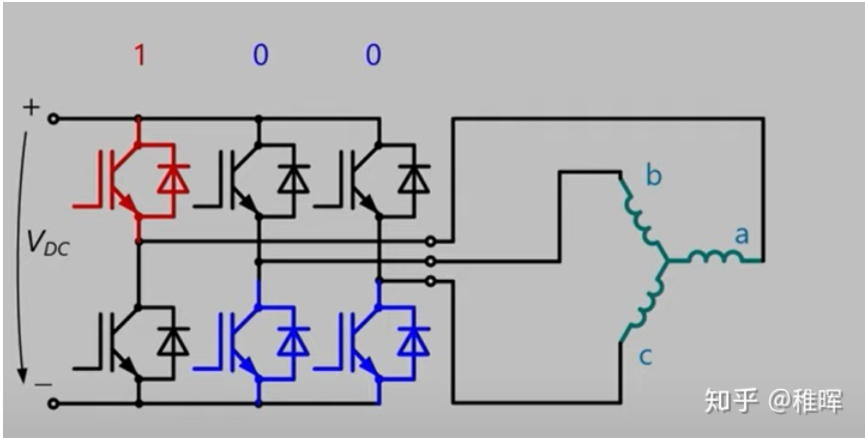
在搜索过程中,为了评估与路径Uk相关的成本,需要将路径从运动空间映射到笛卡尔空间。如图1所示,映射过程通过将每条无人机路径的每个运动段约束到其8个邻居之一来执行,从而t时的运动幅度ρt可以归一化且运动角度αt可以量化,如公式(15)和公式(16)所示:
⛄二、部分源代码
clc;
clear;
close all;
%% 创建搜索场景
model = CreateModel(); % 创建搜索映射和参数
CostFunction=@(x) MyCost(x,model); % 成本函数
nVar = model.n; % 决策变量个数 = PSO 的搜索维数 = 运动次数
VarSize=[nVar 2]; % 决策变量矩阵大小
VarMin=-model.MRANGE; % 粒子的下限(变量)
VarMax = model.MRANGE; % 粒子的上界
%% PSO参数
MaxIt=150; %最大迭代次数
nPop=2000; % 人口规模(群体规模)
w=1; %惯性重量
wdamp=0.98; %惯性重量阻尼比
c1=2.5; % 个人学习系数
c2=2.5; %全局学习系数
alpha= 2;
VelMax=alpha*(VarMax-VarMin); % 最大速度
VelMin=-VelMax; % 最小速度
%% 初始化
% 创建空粒子结构
empty_particle.Position=[];
empty_particle.Velocity=[];
empty_particle.Cost=[];
empty_particle.Best.Position=[];
empty_particle.Best.Cost=[];
% 初始化全球最佳
GlobalBest.Cost = -1; % 最大化问题最大化问题
%创建一个空粒子矩阵,每个粒子都是一个解(搜索路径)
particle=repmat(empty_particle,nPop,1);
% 初始化回路
for i=1:nPop
% 初始化位置
particle(i).Position=CreateRandomSolution(model);
% 初始化速度
particle(i).Velocity=zeros(VarSize);
%评估
costP = CostFunction(particle(i).Position);
particle(i).Cost= costP;
% 更新个人最佳状态
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
% 更新全球最佳
if particle(i).Best.Cost>GlobalBest.Cost
GlobalBest=particle(i).Best;
end
end
⛄三、运行结果


⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]杨鸿光,张宇辉,魏文红.用于UAV运动目标搜索的自适应粒子群算法[J].计算机工程与应用
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除


![[附源码]计算机毕业设计springboot小区疫情事件处理系统](https://img-blog.csdnimg.cn/4cf0b48c124541e8a614837c783291b9.png)

![[附源码]计算机毕业设计JAVA学生考试成绩分析系统](https://img-blog.csdnimg.cn/3760c73c2deb4787ac40f1881b905df7.png)

![[附源码]Python计算机毕业设计Django基于VUE的网上订餐系统](https://img-blog.csdnimg.cn/6a15efb3e5be4b6bae628b111c2e33f4.png)