版本
系统版本:ubuntu22.04
ROS2版本:humble
Moveit版本:moveit2-humble
安装 ROS 2 和 Colcon
如果您在接下来的几个步骤中遇到错误,一个好的开始是返回并确保您已正确安装 ROS 2。用户通常忘记的一个是获取 ROS 2 安装本身。
source /opt/ros/humble/setup.bash
安装rosdep以安装系统依赖项:
sudo apt install python3-rosdep
安装 ROS 2 后,请确保您拥有最新的软件包:
sudo rosdep init
rosdep update
sudo apt update
sudo apt dist-upgrade
这里如果出错,把rosdep换成rosdepc
使用mixin安装Colcon ROS 2 构建系统:
sudo apt install python3-colcon-common-extensions
sudo apt install python3-colcon-mixin
colcon mixin add default https://raw.githubusercontent.com/colcon/colcon-mixin-repository/master/index.yaml
colcon mixin update default
安装vcstool:
sudo apt install python3-vcstool
创建 Colcon 工作区并下载教程
对于教程,您需要有一个colcon工作区设置。
mkdir -p ~/ws_moveit2/src
进入您的 Colcon 工作区并拉取 MoveIt 教程源:
cd ~/ws_moveit2/src
git clone https://github.com/ros-planning/moveit2_tutorials -b humble --depth 1
接下来我们将下载 MoveIt 其余部分的源代码:
vcs import < moveit2_tutorials/moveit2_tutorials.repos
这里如果出错是网络问题,github DDS受到污染。
打开/home/**/ws_moveit2/src/moveit2_tutorials.repos
repositories:
launch_param_builder:
type: git
url: https://github.com/PickNikRobotics/launch_param_builder
version: main
moveit2:
type: git
url: https://github.com/ros-planning/moveit2
version: humble
moveit_resources:
type: git
url: https://github.com/ros-planning/moveit_resources
version: ros2
moveit_task_constructor:
type: git
url: https://github.com/ros-planning/moveit_task_constructor.git
version: ros2
moveit_visual_tools:
type: git
url: https://github.com/ros-planning/moveit_visual_tools
version: ros2
rosparam_shortcuts:
type: git
url: https://github.com/PickNikRobotics/rosparam_shortcuts
version: ros2
srdfdom:
type: git
url: https://github.com/ros-planning/srdfdom.git
version: ros2
在src目录下分别用git clone ***下载到7个文件夹内。可以尝试在网址前面加上:https://ghproxy.com/ ,后面要加 -ros2等。
git clone https://ghproxy.com/https://github.com/PickNikRobotics/launch_param_builder -b main
git clone https://ghproxy.com/https://github.com/ros-planning/moveit2 -b humble
git clone https://ghproxy.com/https://github.com/ros-planning/moveit_resources -b ros2
git clone https://ghproxy.com/https://github.com/ros-planning/moveit_task_constructor.git -b ros2
git clone https://ghproxy.com/https://github.com/ros-planning/moveit_visual_tools -b ros2
git clone https://ghproxy.com/https://github.com/PickNikRobotics/rosparam_shortcuts -b ros2
git clone https://ghproxy.com/https://github.com/ros-planning/srdfdom.git -b ros2
构建Colcon 工作区
以下将从 Debian 安装任何不在您的工作区中的软件包依赖项。这是将安装 MoveIt 及其所有依赖项的步骤:
sudo apt update && rosdep install -r --from-paths . --ignore-src --rosdistro $ROS_DISTRO -y
下一个命令将配置您的 Colcon 工作区:
cd ~/ws_moveit2
colcon build --mixin release
此构建命令可能需要很长时间(20 分钟以上),具体取决于您的计算机速度和可用 RAM 量(我们建议 32 GB)。如果您的计算机内存不足,或者您的构建通常很难在您的计算机上完成,您可以将参数附加到上面的 colcon 命令。–parallel-workers 1
如果 mixin 报错了,可以换一种编译方式:
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
这一步出错:ERROR:colcon:colcon build: Duplicate package names not supported。因为重名了,删掉一个。
https://www.guyuehome.com/bubble/detail/id/66980
https://blog.csdn.net/shanpenghui/article/details/89210049
因为你在没有删除vcstool import的情况下重复import了一次,解决方法:把src文件夹里面你从ros2的github下载的东西都删除,再做一次。 无效。是因为重名了,删掉一个。
设置Colcon 工作区
来源 Colcon 工作区:
source ~/ws_moveit2/install/setup.bash
可选:将上一个命令添加到您的.bashrc:
echo 'source ~/ws_moveit2/install/setup.bash' >> ~/.bashrc
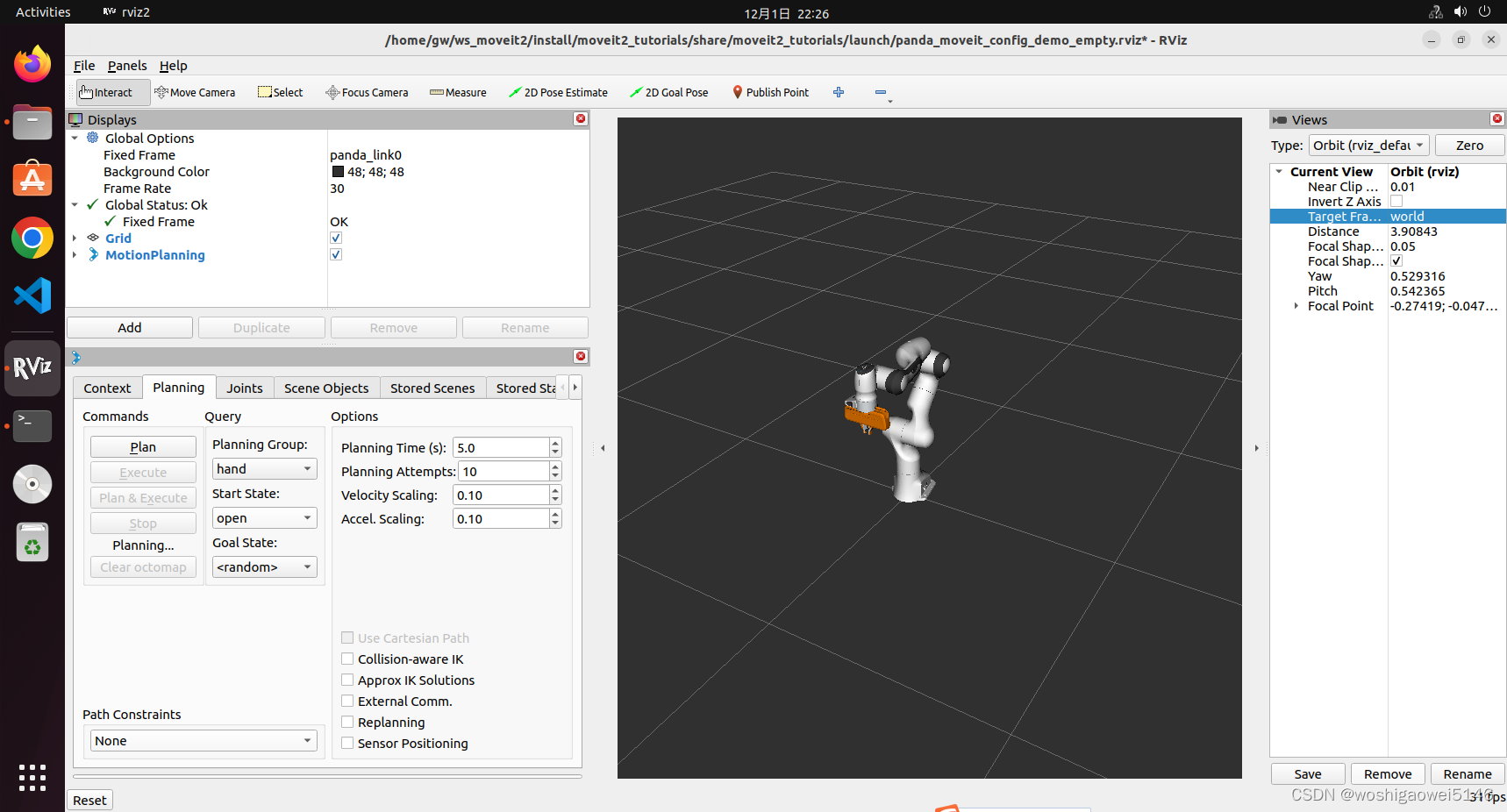
运行样例程序
ros2 launch moveit2_tutorials demo.launch.py rviz_tutorial:=true
添加MotionPlanning然后修改group拖拽机械臂执行运动规划。
参考
https://moveit.picknik.ai/humble/doc/tutorials/getting_started/getting_started.html
https://blog.csdn.net/qq_43557907/article/details/125636298