视觉惯性导航初始化方法综述
编辑切换为居中
添加图片注释,不超过 140 字(可选)
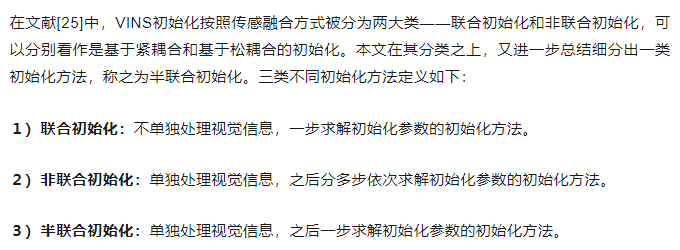
初始化相关的简介,在这里知道初始化方法可以分为联合初始化、非联合初始化和半联合初始化三种方法即可。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
互补关系也就是说相机在高速运动的时候IMU可以帮忙,IMU的累积误差相机也可以来帮忙。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
这里说了相机和IMU是如何互补的。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
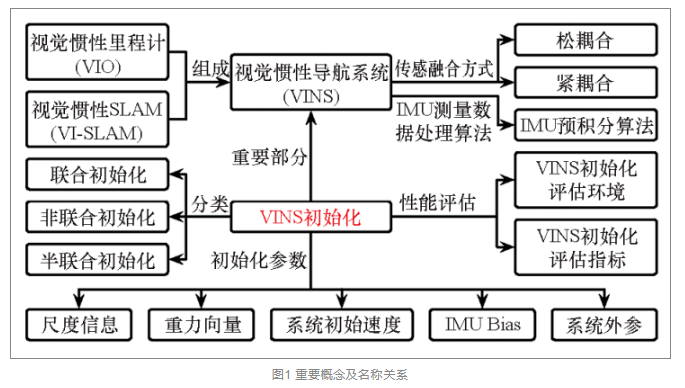
这篇博客的脉络。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
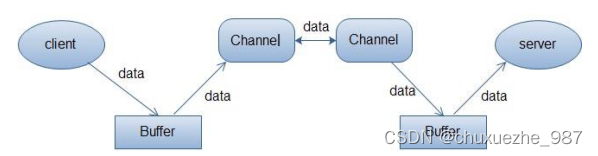
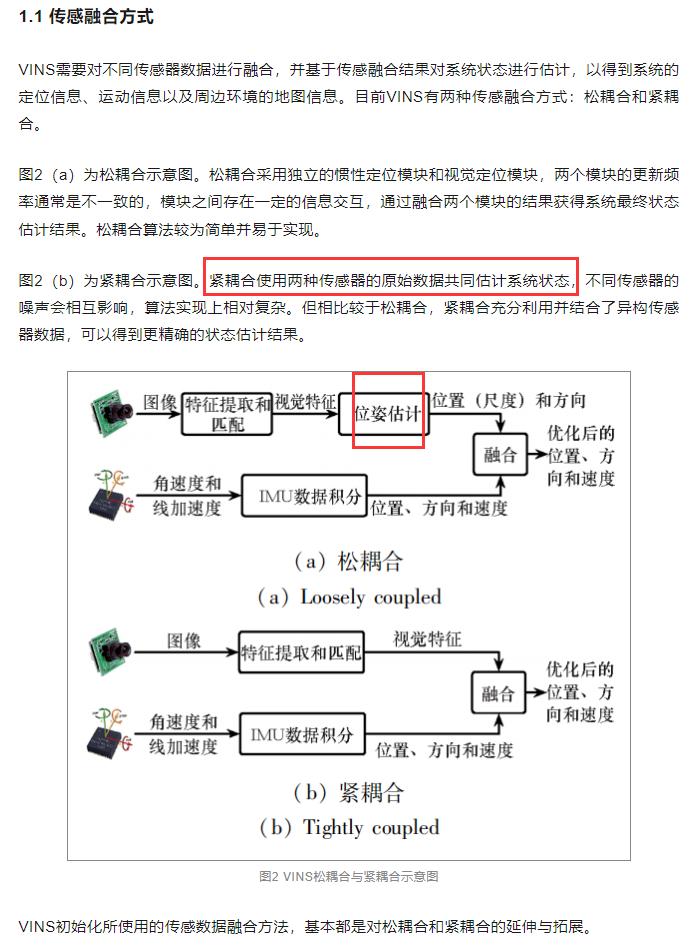
可以根据上图看一下松耦合和紧耦合之间的区别。松耦合表示的是相机和IMU分别计算完位姿、方向和速度等信息以后进行融合。而紧耦合则表示的是相机提取的特征与imu的信息直接放到一起,然后进行融合。紧耦合充分利用了异构传感器数据,可以得到更加精确的状态估计结果。

编辑切换为居中
添加图片注释,不超过 140 字(可选)
IMU预积分算法的核心思想是将一段时间内IMU测量数据中与状态向量更新无关的数据进行积分处理,作为这段时间内的IMU预积分项,避免这部分数据在后续过程中的重复积分,最终达到简化状态估计的目的。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
联合初始化、非联合初始化和半联合初始化之间的关系,就是针对视觉信息单独或者不单独处理,以及后续是否一步求解初始化参数的区别。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
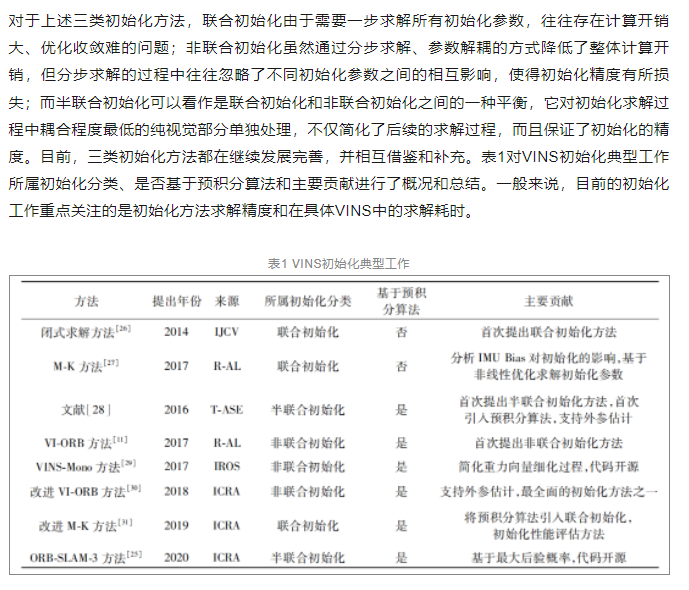
联合初始化存在着计算开销大、优化收敛难的问题。非联合初始化忽略了参数之间的相互影响,使得初始化精度有所损失。而半联合初始化是一种平衡,对初始化求解过程中耦合程度最低的纯视觉部分单独处理,同时也保证了初始化的精度。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
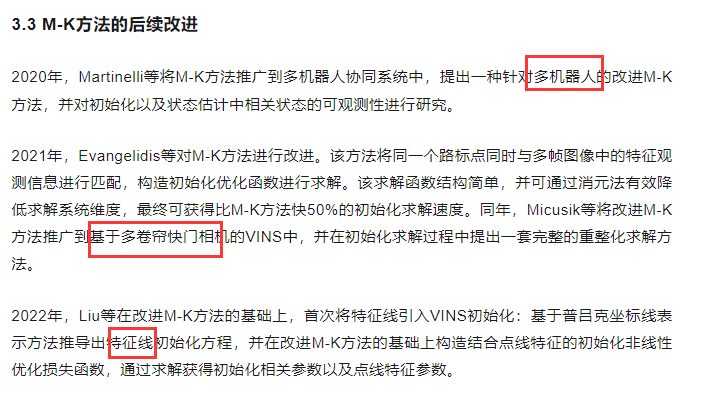
基于MK方法的一些扩展,可以用到多机,也可以用到多卷帘快门相机中,同时也可以结合点线特征来进行相应的初始化。这里就不得不提一下PL-VINS,使用点线特征的vins了。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
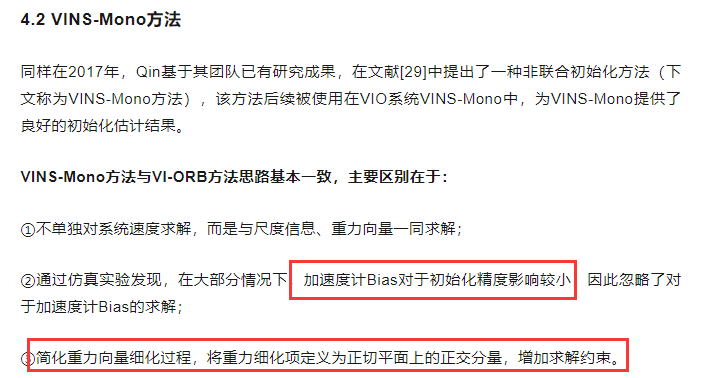
vins属于是非联合初始化的框架,它没有求加速计的bias,同时针对重力向量细化的过程进行简化。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
感觉加入GNSS或者磁力计都是导航领域的内容了,hhh,个人感觉定位和导航还是有些些差别的。(可能导航更注重在大场景下的定位,而一般的定位可能是个比较狭小空间,反正相对导航来说空间范围要小的多。)
编辑切换为居中
添加图片注释,不超过 140 字(可选)
编辑切换为居中
添加图片注释,不超过 140 字(可选)
EuRoC数据集可以提供VINS(注意这里的VINS不是vins-mono 而是一个统称)初始化所需的运动激励(就是说每个轴的加速度要到达一定的值,这样才能让初始化启动)和传感信息。

编辑切换为居中
添加图片注释,不超过 140 字(可选)
联合初始化方法的代表--改进M-K方法
非联合初始化方法的代表--VINS-Mono
半联合初始化方法的代表--ORB-SLAM3
编辑切换为居中
添加图片注释,不超过 140 字(可选)
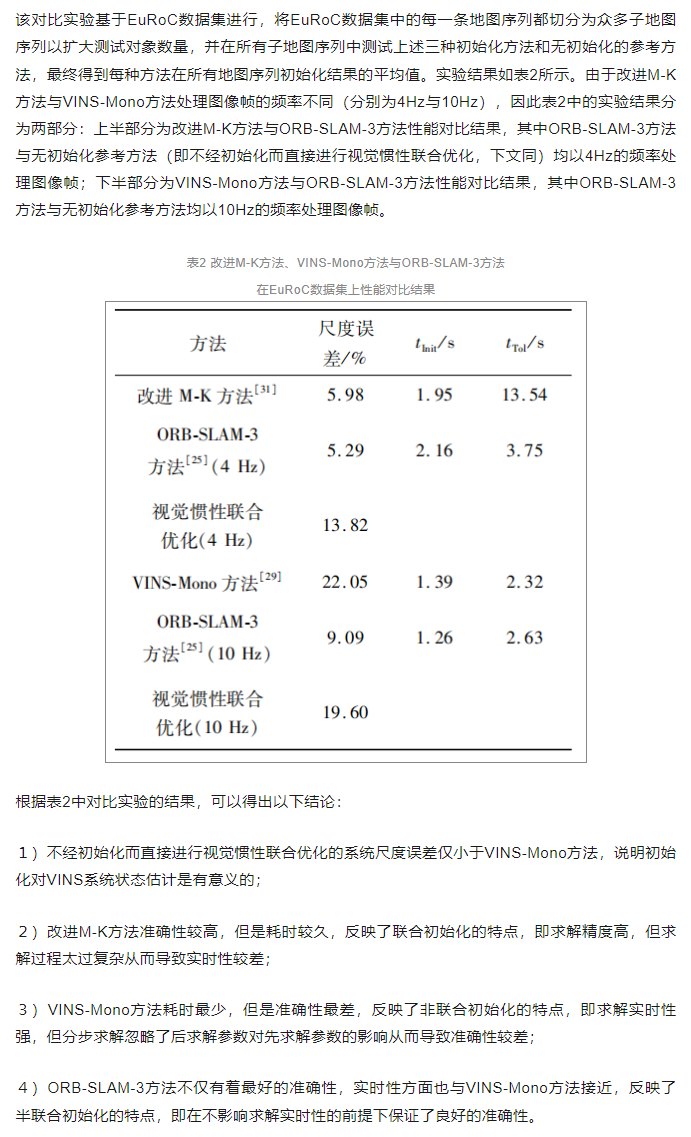
简单一句话,这个实验说明ORB-SLAM3的半联合优化方法是最吊的。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
编辑切换为居中
添加图片注释,不超过 140 字(可选)
以上11点就是VINS初始化未来的发展方向,感觉1可以研究,其他的话就不涉及了。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
最后总结全文,读完本文应该知道初始化的方法分为联合初始化、非联合初始化和半联合初始化三类,其中每类的代表也应该知道。联合初始化方法的代表--改进M-K方法,非联合初始化方法的代表--VINS-Mono,半联合初始化方法的代表--ORB-SLAM3。然后针对初始化,是视觉惯性SLAM的一块比较重要的内容,说到底SLAM的每一块都很重要,都有能改进的地方。本篇博客分享到这里,初始化内容也是第一次看综述,让我对初始化这块也算是巩固或者说有一个新的认知叭。