KF-GINS开源代码讲解直播课PPT和学习资源
文章目录
- KF-GINS开源代码讲解直播课PPT和学习资源
- KF-GINS 组合导航算法原理
- KF-GINS 代码设计
- KF-GINS 代码实现
- KF-GINS 常见问题
- KF-GINS 扩展
- 直播的部分问题
武汉大学i2Nav团队开源的基于卡尔曼滤波的GNSS/INS组合导航系统(KF-GINS)算法代码。
https://github.com/i2Nav-WHU/KF-GINS
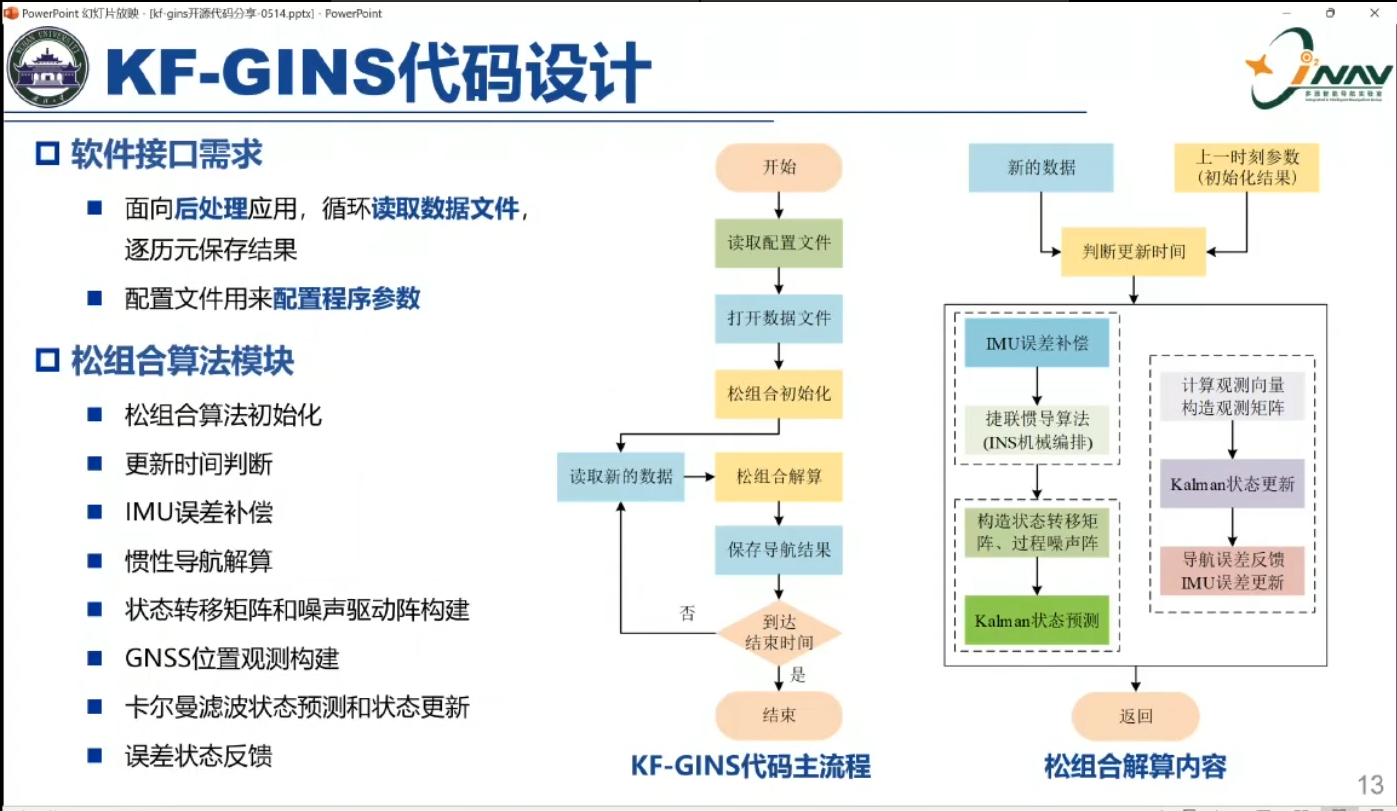
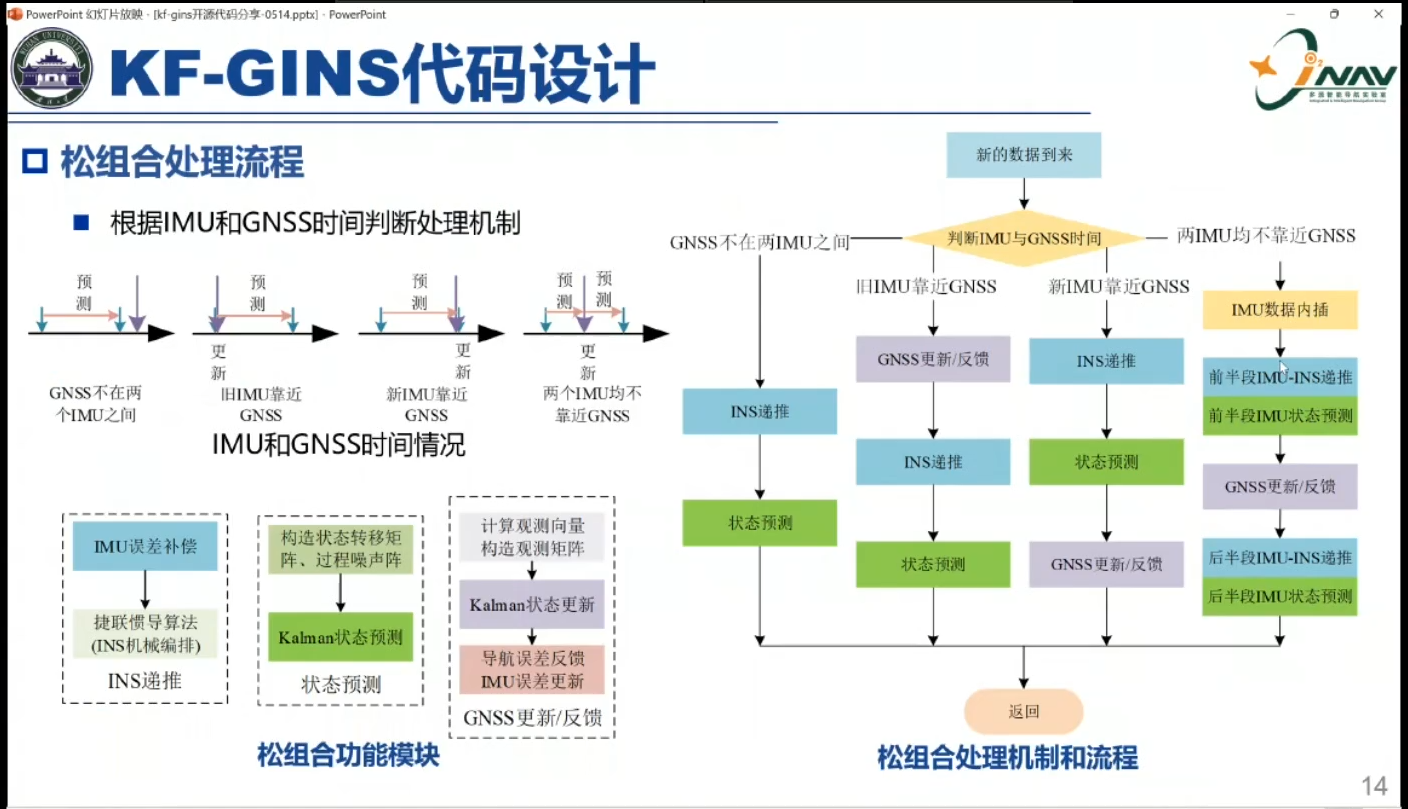
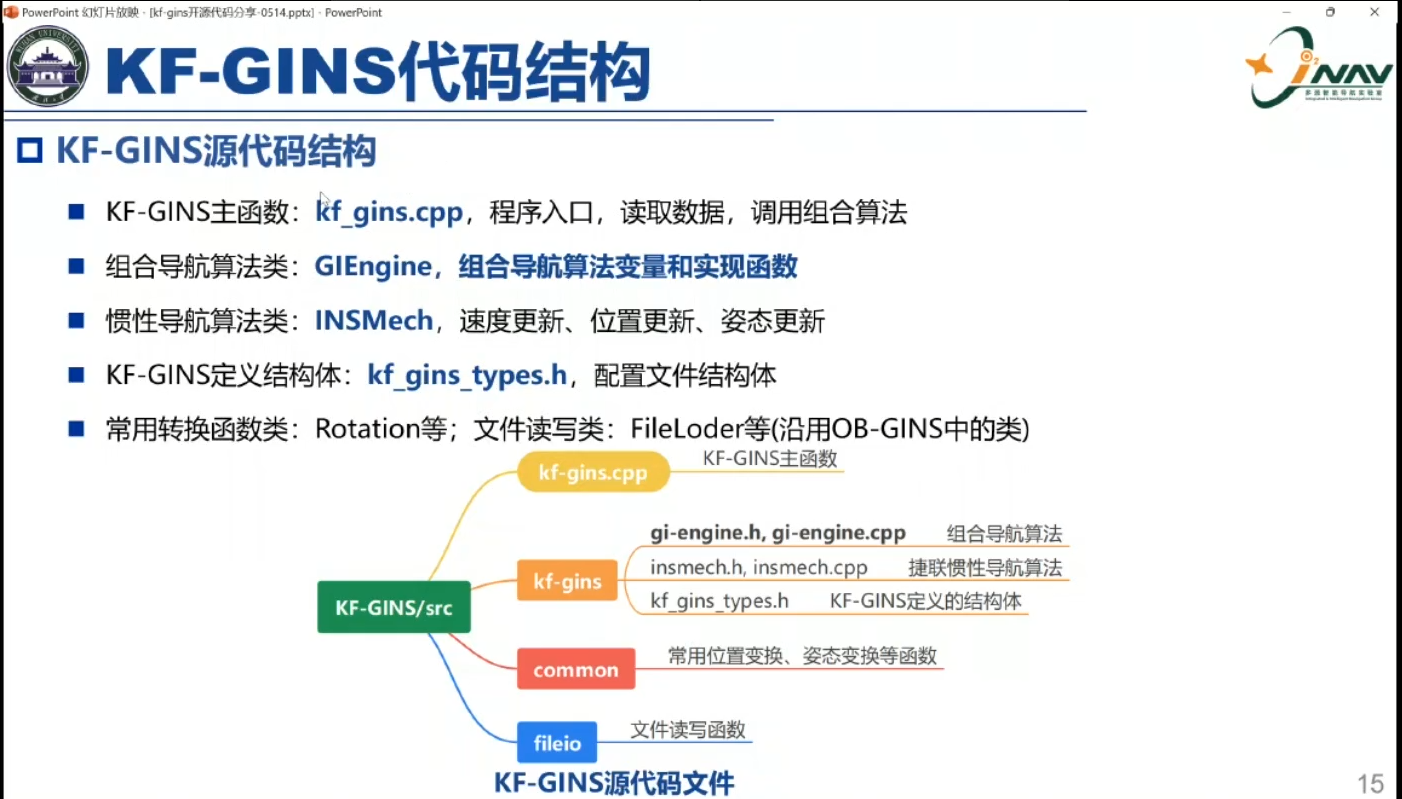
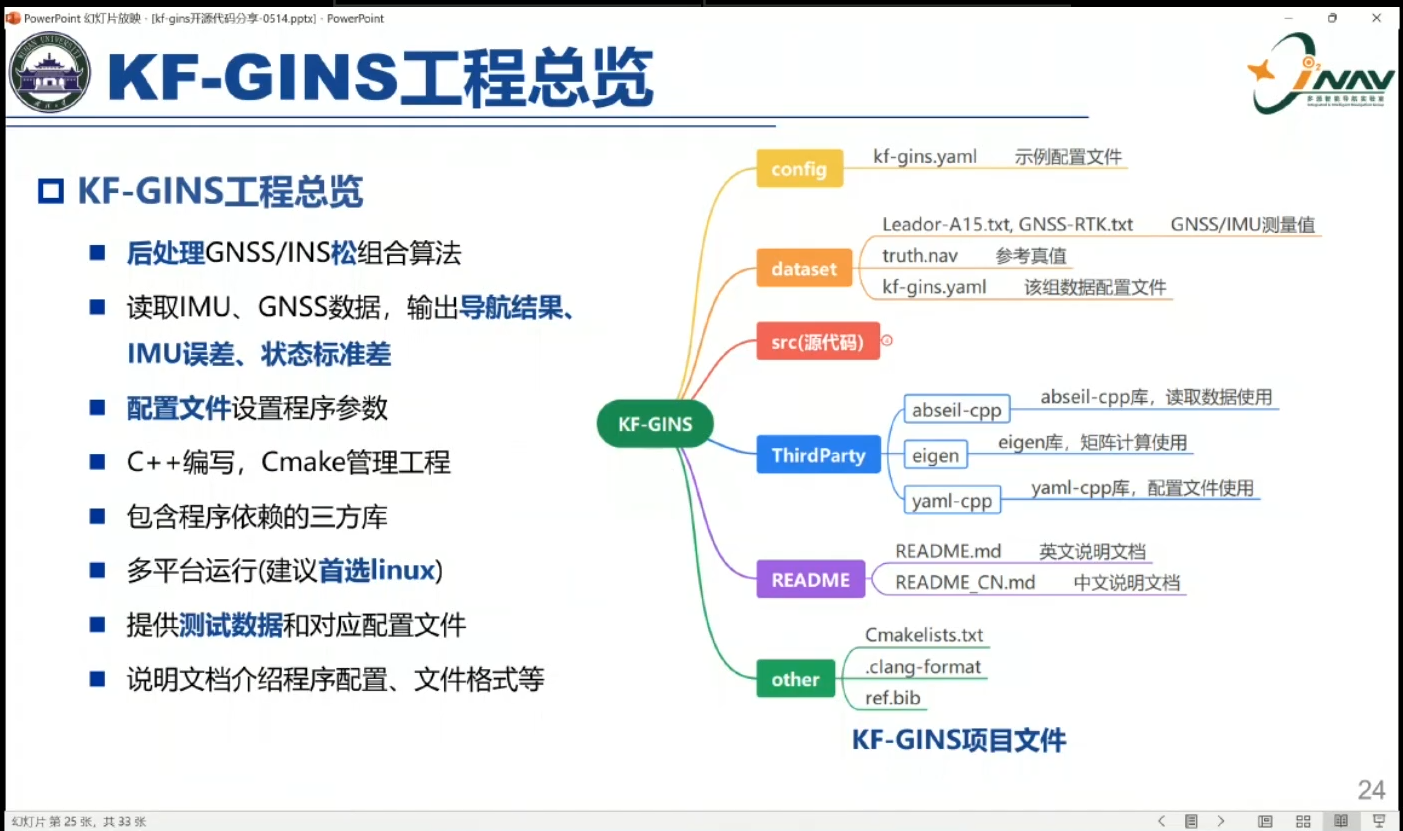
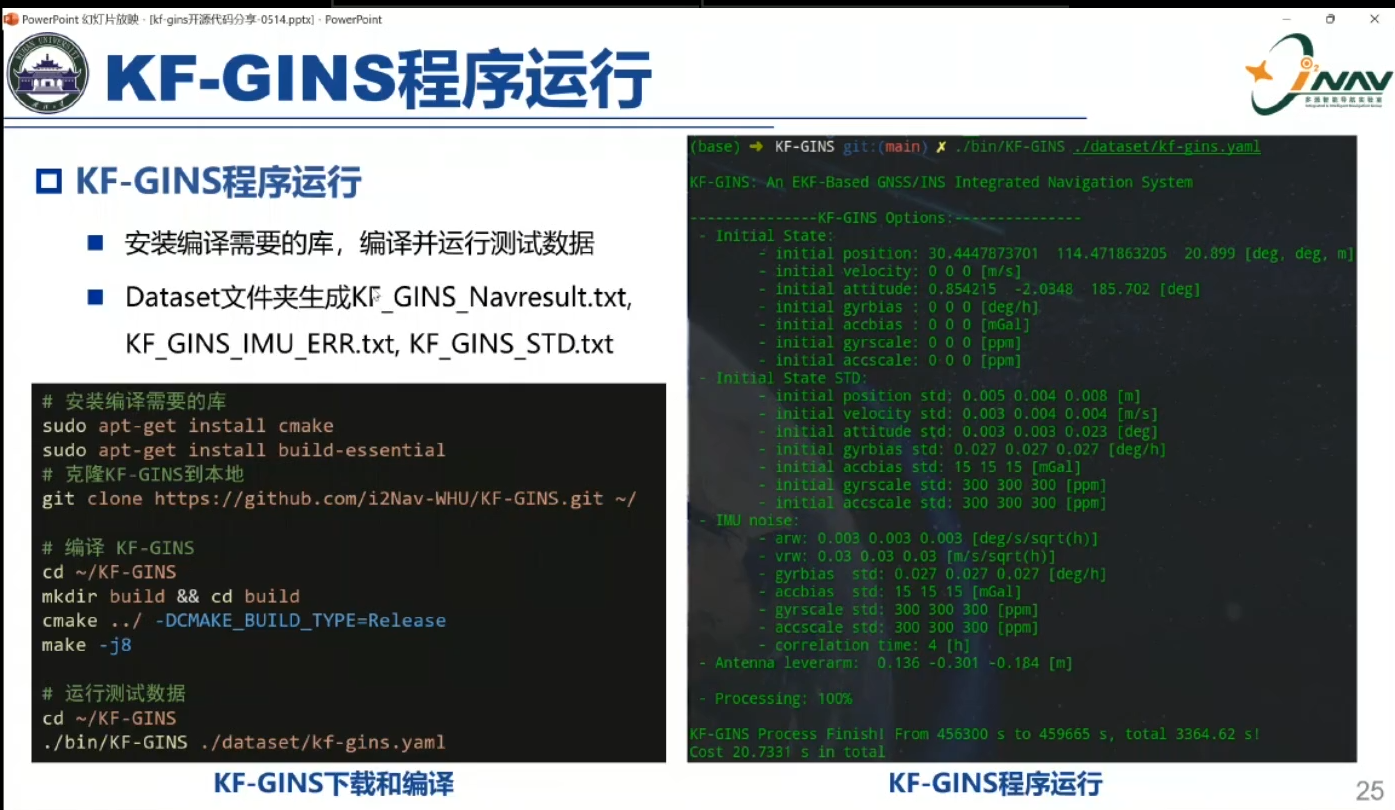
代码结合i2Nav团队已公开的视频课程、讲义[1, 2]进行设计,作为基础的GNSS/INS松组合算法研究平台。KF-GINS采用C++语言编写,各功能函数和模块相对独立,复用性和可扩展性较强。KF-GINS主要特点有:
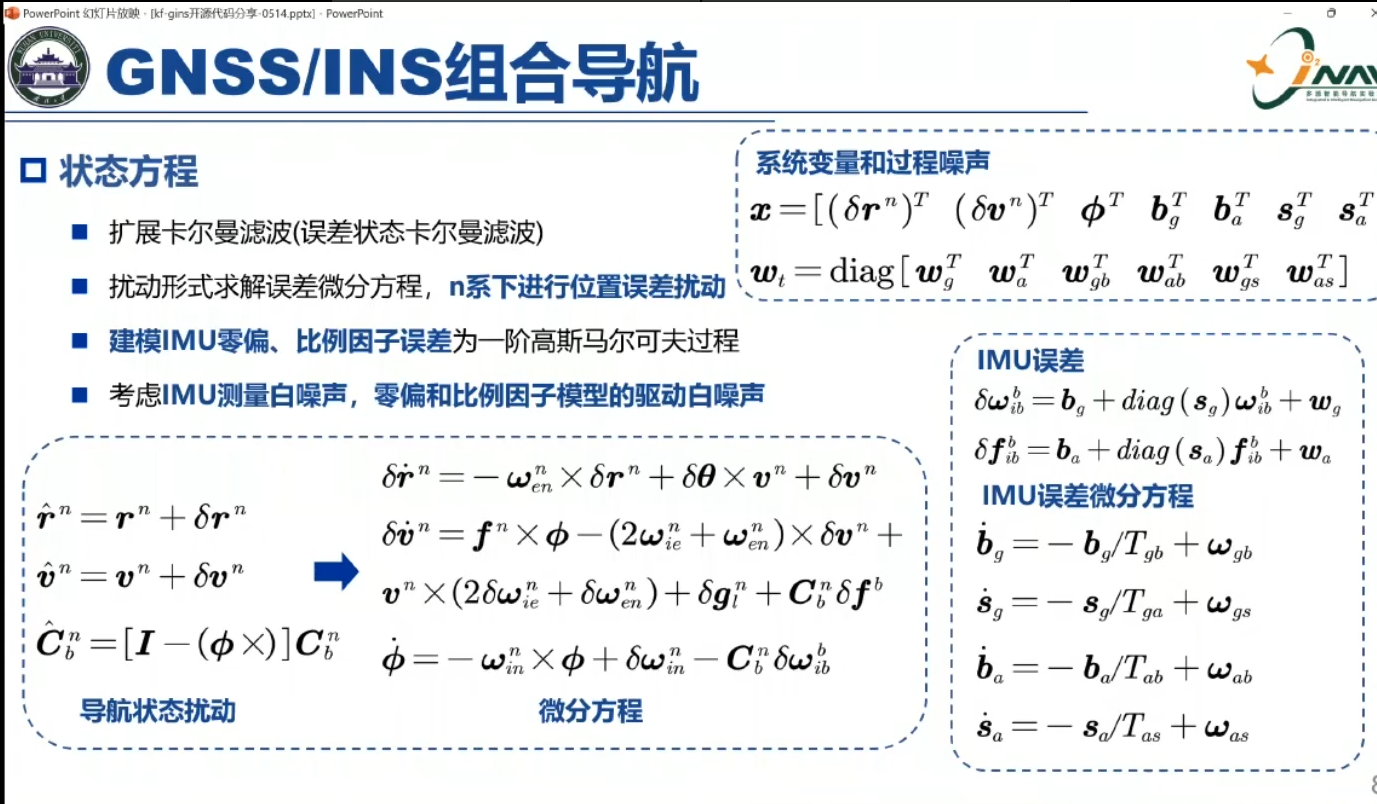
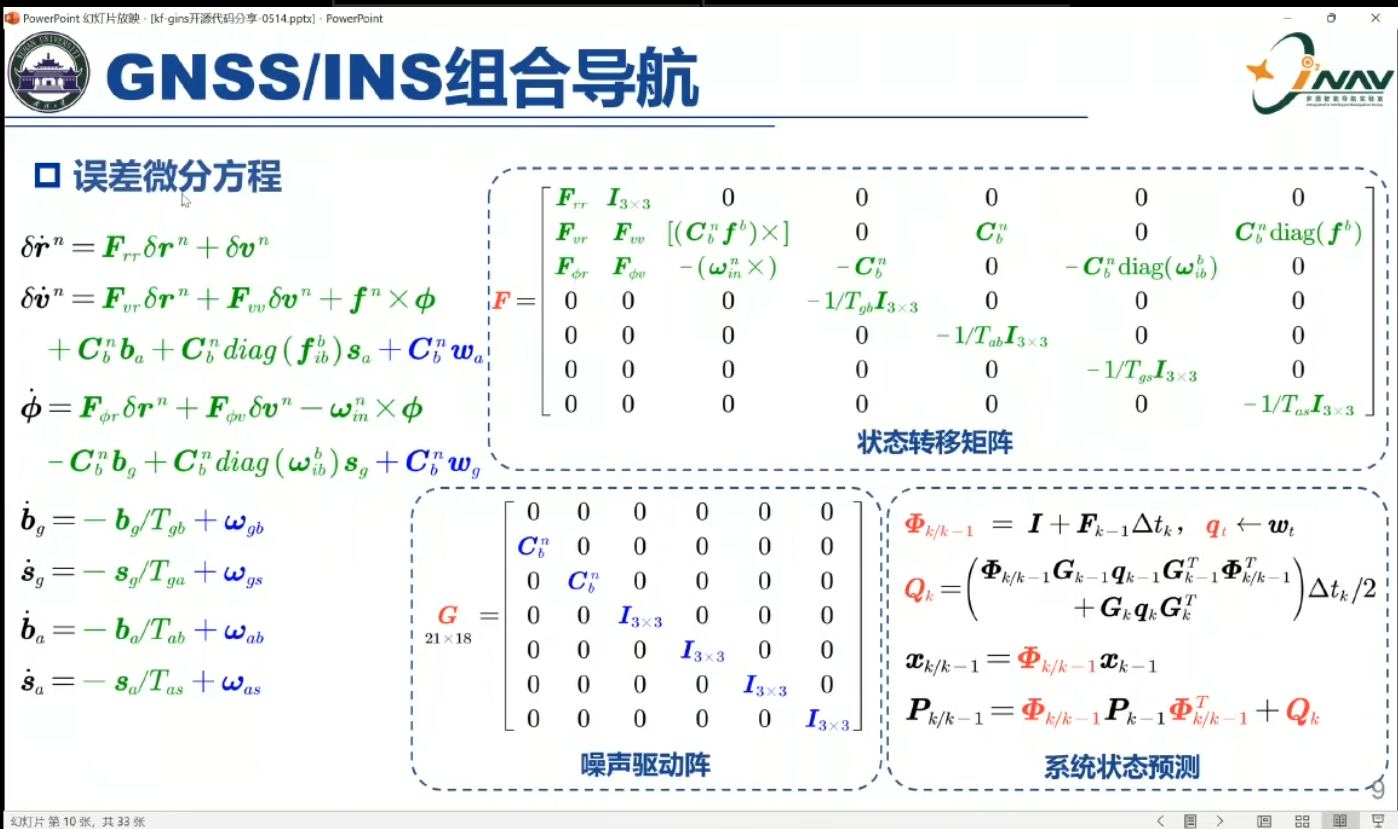
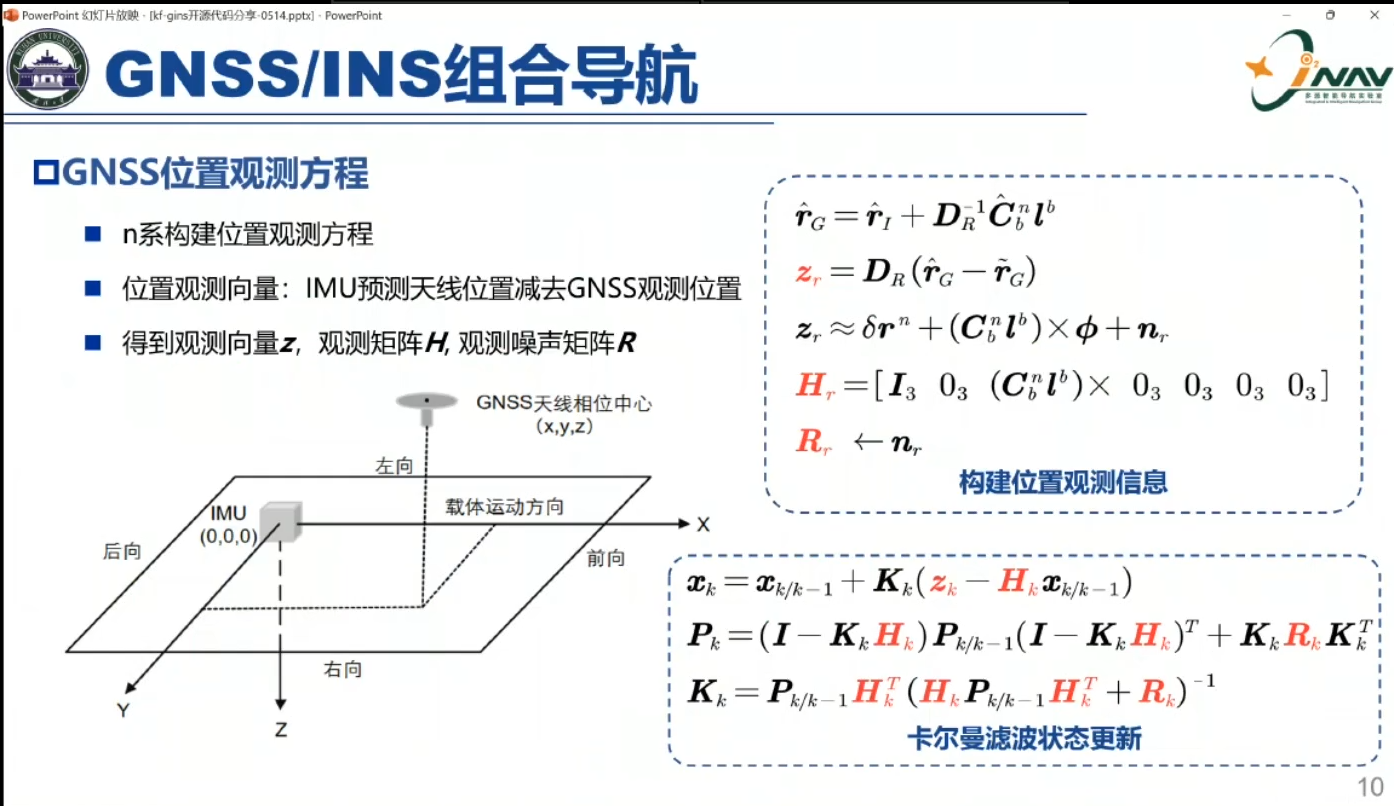
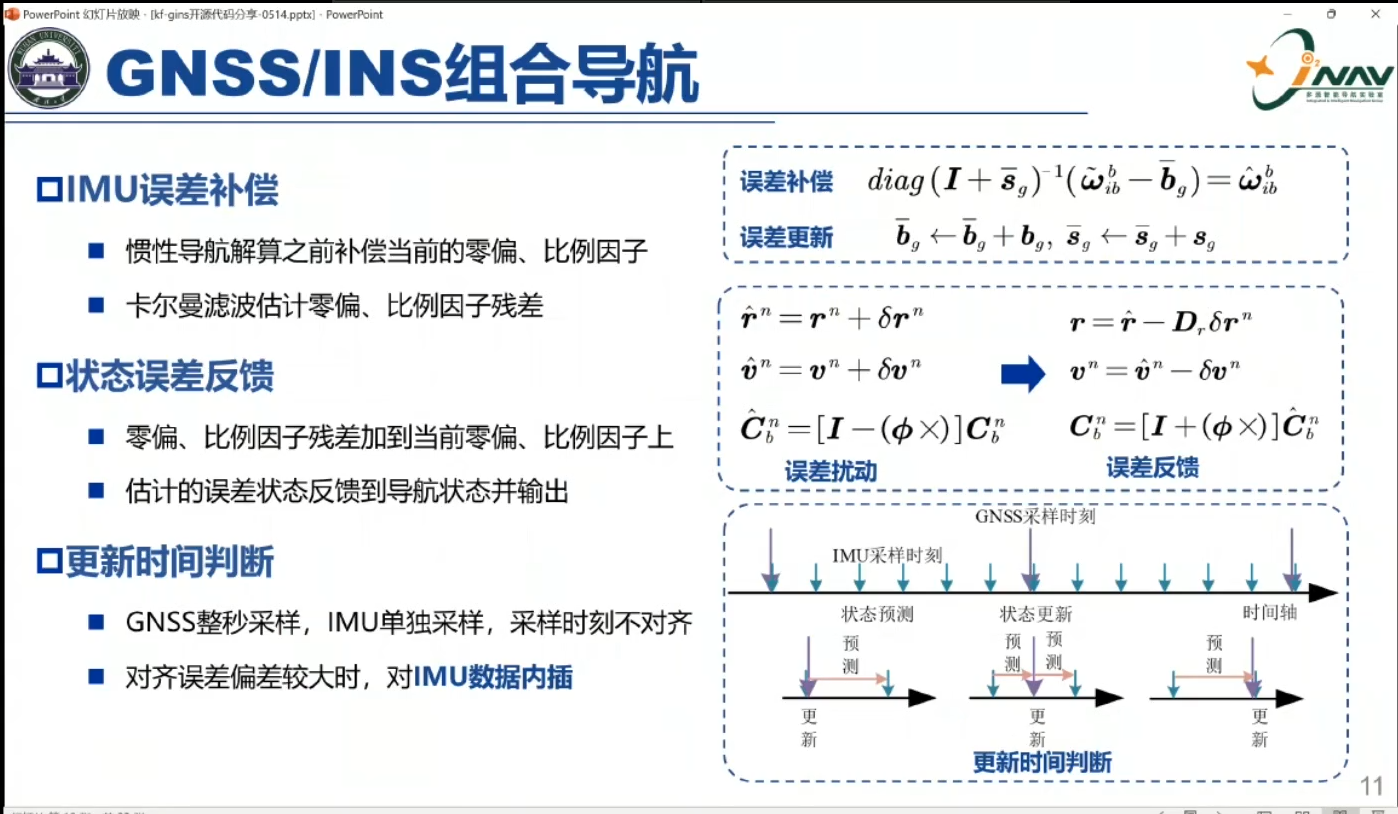
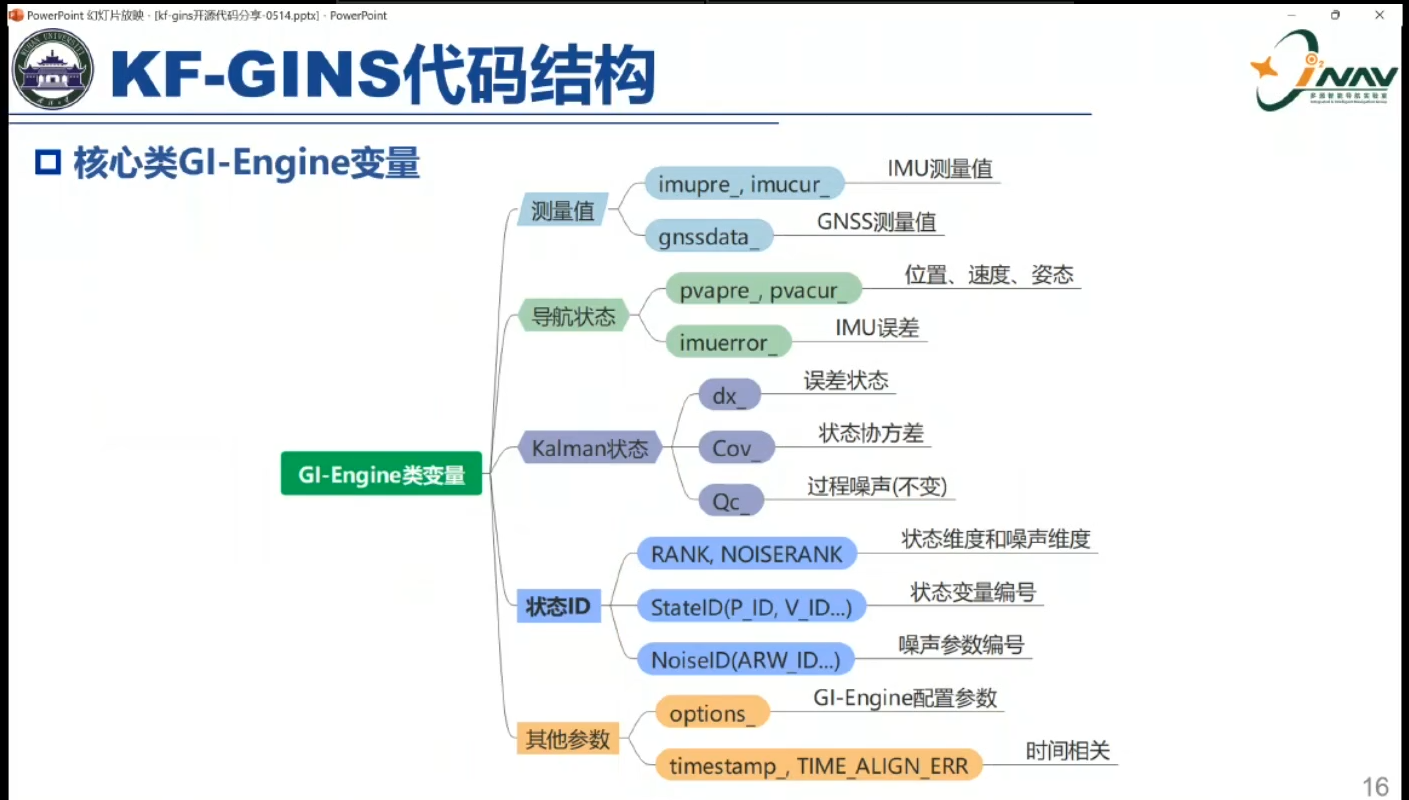
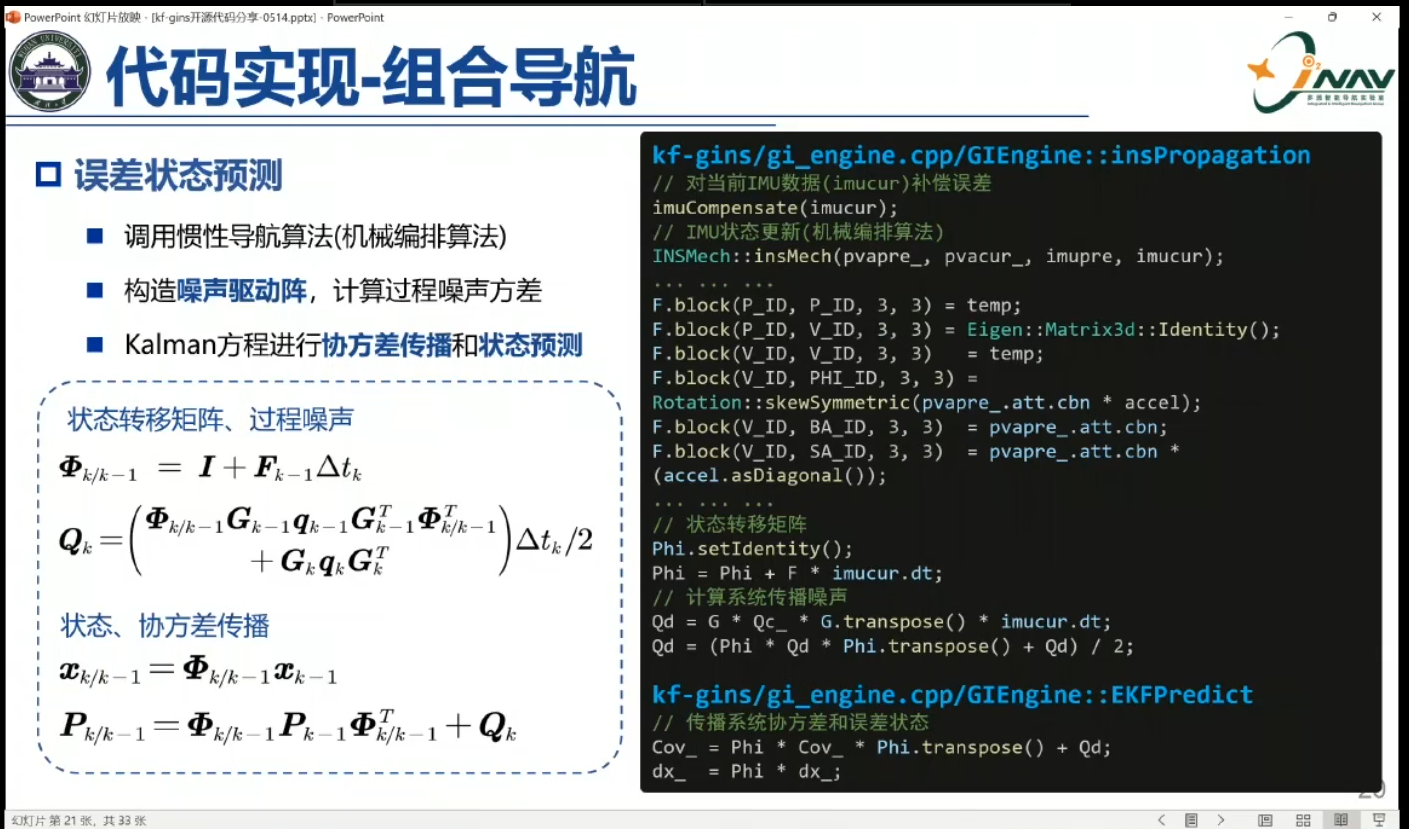
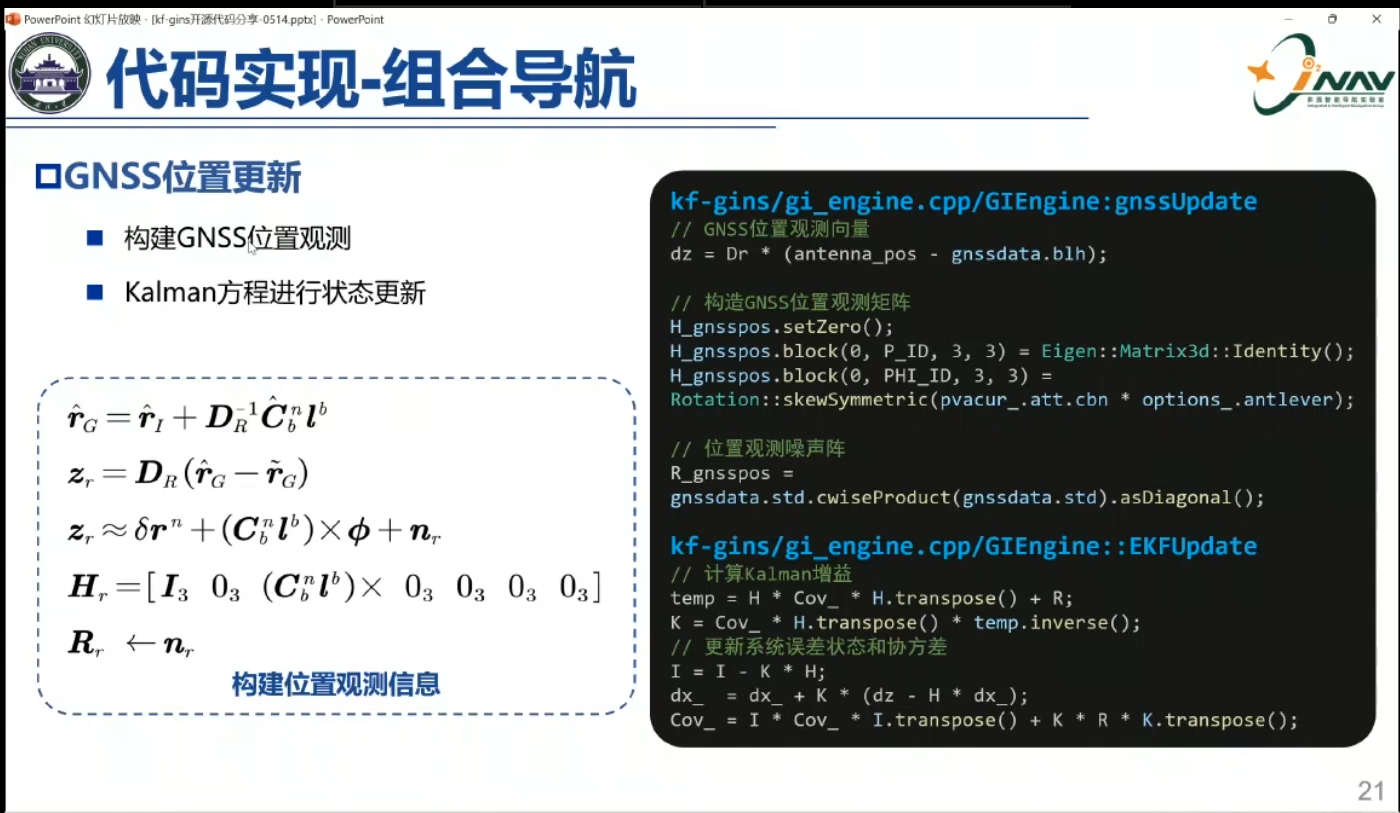
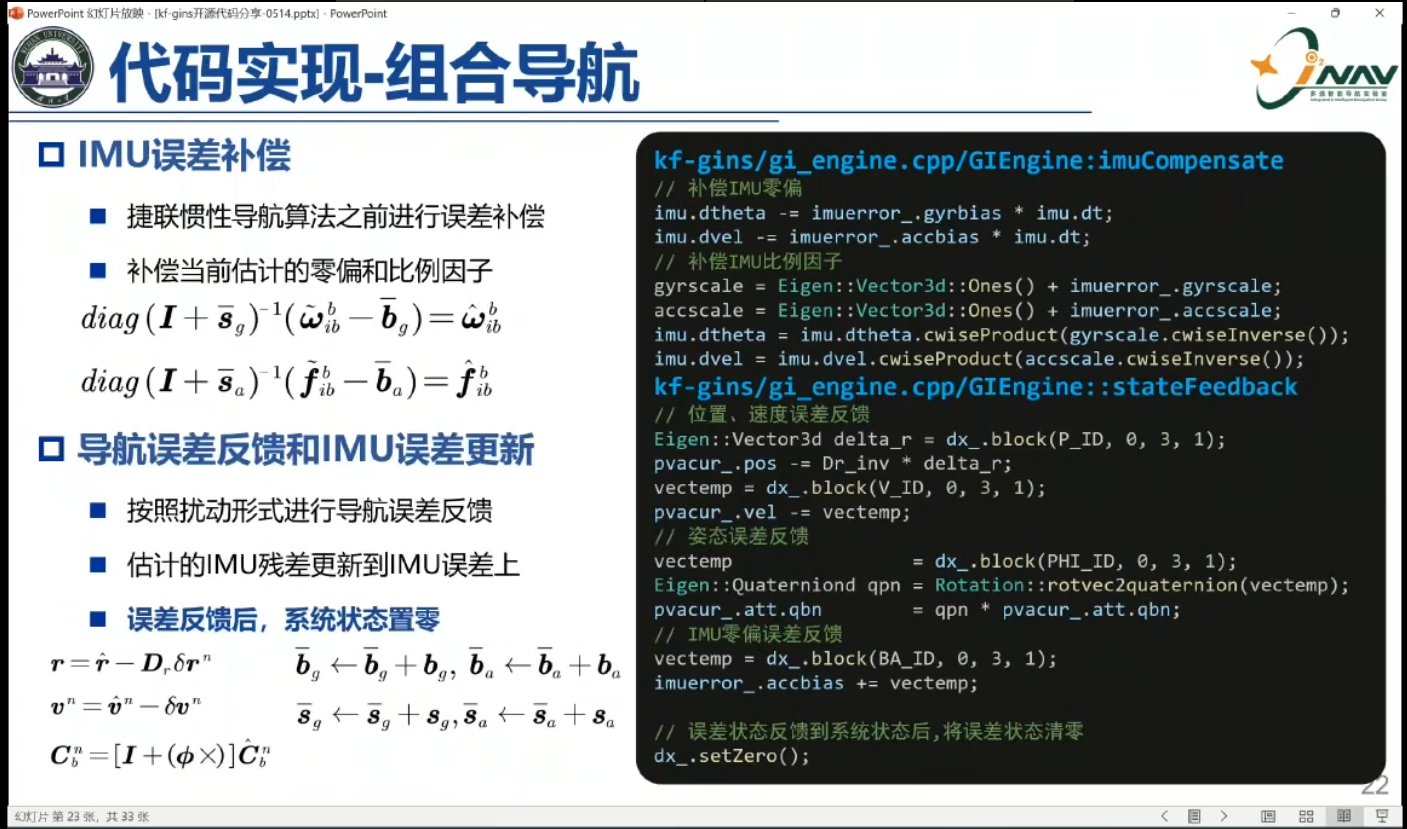
- 扩展卡尔曼滤波(误差状态向量)架构的GNSS/INS松组合算法,包括IMU误差补偿、惯性导航解算、Kalman滤波、误差反馈等
- 采用21维系统误差状态,包括位置误差、速度误差、姿态误差、IMU零偏误差和IMU比例因子误差
- 姿态误差采用Phi角模型,速度、位置误差定义在导航坐标系下
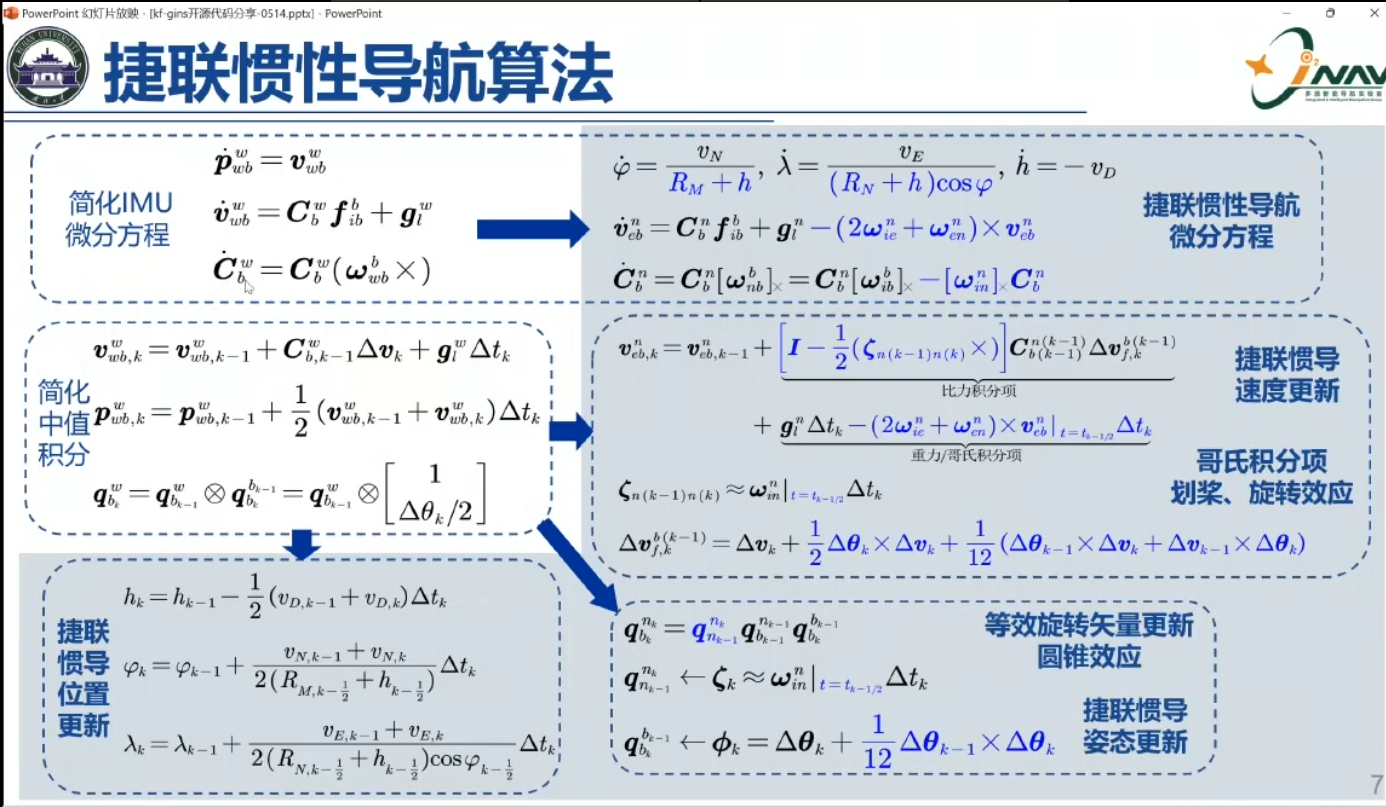
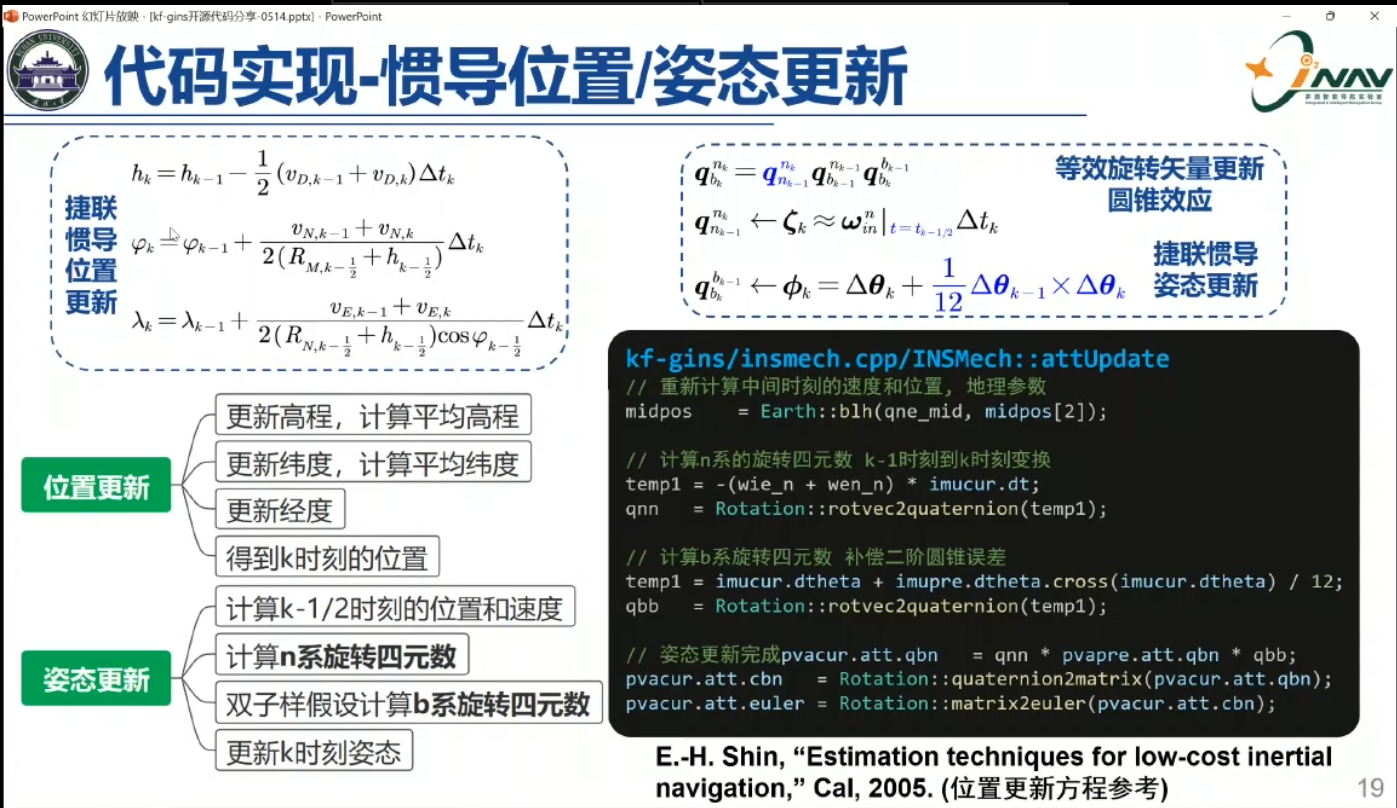
- 惯性导航解算采用基于角速度和加速度线性变化假设的双子样机械编排算法,补偿了姿态圆锥效应、速度的旋转效应和划桨效应
[1] 牛小骥, 陈起金, “惯性导航原理与GNSS/INS组合导航课程讲义”, 武汉大学多源智能导航实验室, 2022.
[2] 牛小骥, 陈起金, “惯性导航原理与GNSS/INS组合导航课程视频”, 武汉大学多源智能导航实验室, 2022.
已有的还不错的学习笔记:(24条消息) 组合导航_Amentia outsider的博客-CSDN博客
KF-GINS 组合导航算法原理
KF-GINS 代码设计

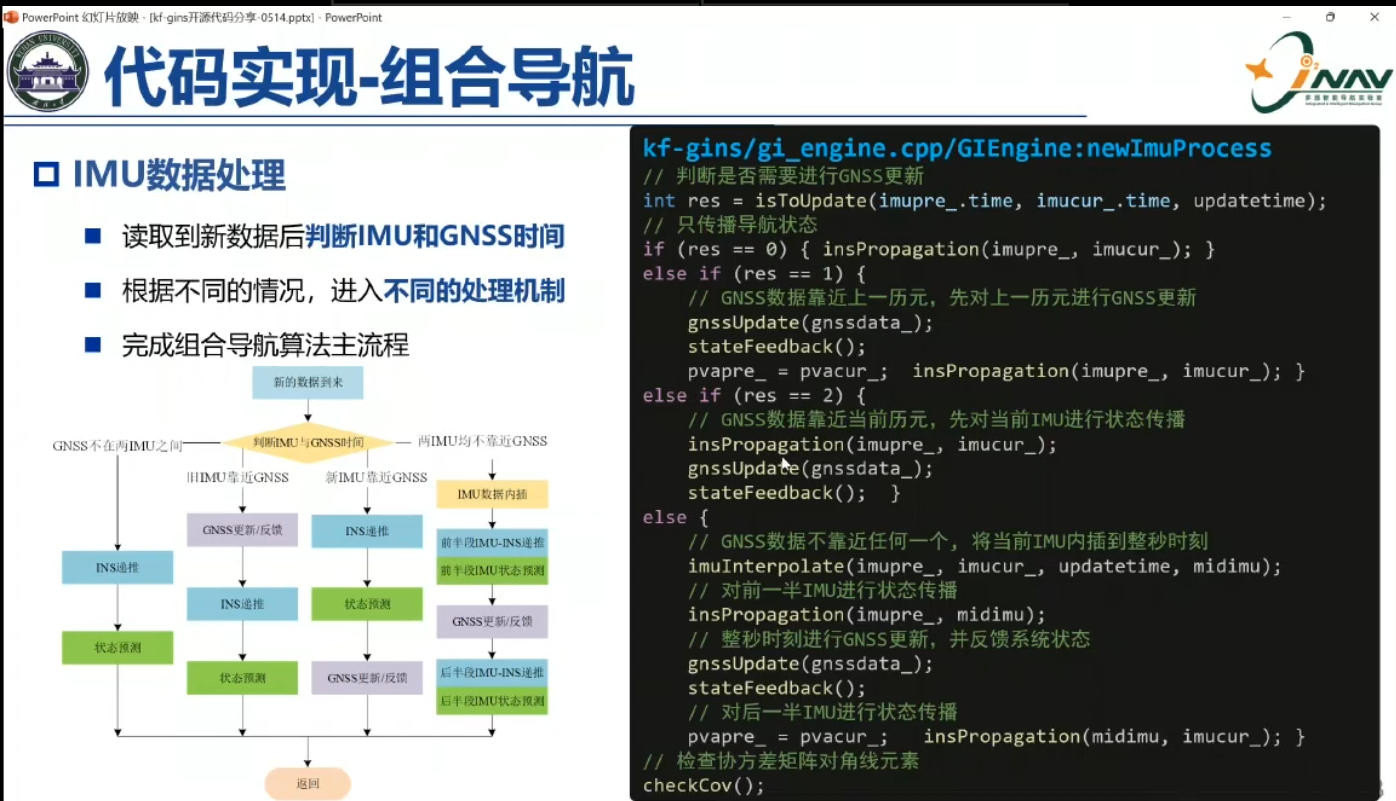
KF-GINS 代码实现
KF-GINS 常见问题
KF-GINS 扩展

直播的部分问题
相关时间对结果不敏感,零篇rms影响较大
10元低价IMU,需要做什么处理,消费级IMU对计算量没要求的话可以直接用
该代码机载、车载测试较多,靠近发动机可能环境比较恶劣较有挑战
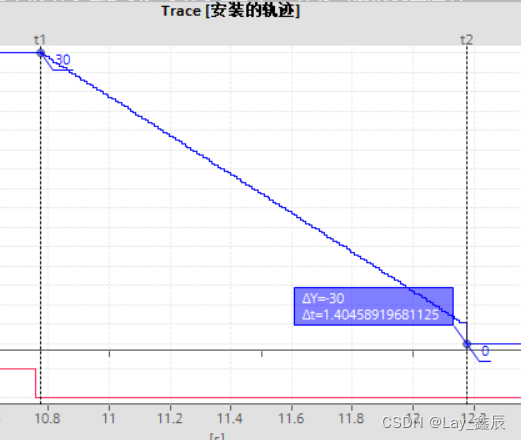
经验上讲 消费级IMU 1分钟 发散30-50米
IMU噪声怎么给定:产品手册allan方差,驱动白噪声跟模型有关,参考allan方差曲线
航向角 6度-10度可满足小角度近似,否则可能滤波不收敛
减速带震动的突变,不太会影响算法精度,但是角速度加速度的变化挺大,影响状态转移矩阵,滤波误差一致性变差,结果在可接受范围内
i2Nav实验室的方向:深组合、行人、室内、精密授时、惯性测量、车载组合导航
IMU数据丢失(处理方法:超过3个历元认为不可用,小于3用内插)
抑制发散:NHC、ZUPT、航向约束,挖掘所有可利用信息
实时性的问题:GNSS定位结果延时到来的问题,解决方法是保存之前的状态,利用状态转移在GNSS对应的时刻进行量测更新,b站开源课程有一些介绍
圆锥补偿误差系数:PSINS中1/3,KF-GINS:1/12, 两种做法的时间假设不一样,但是工程上影响不大
可以加qq群联系答疑询问老师