一、前言
此示例演示如何模拟被动声纳系统。固定的水声信标由浅水通道中的拖曳无源阵列检测和定位。声信标以每秒 10.37 千赫兹的速度传输 5 毫秒脉冲,并建模为各向同性投影仪。定位器系统在表面下方拖曳一个无源阵列,该阵列被建模为均匀线性阵列。一旦检测到声信标信号, 到达方向估计器用于定位信标.
二、定义水下通道
在此示例中,声学信标位于浅水通道的底部, 深 200 米.无源阵列被拖到表面下方以定位信标.
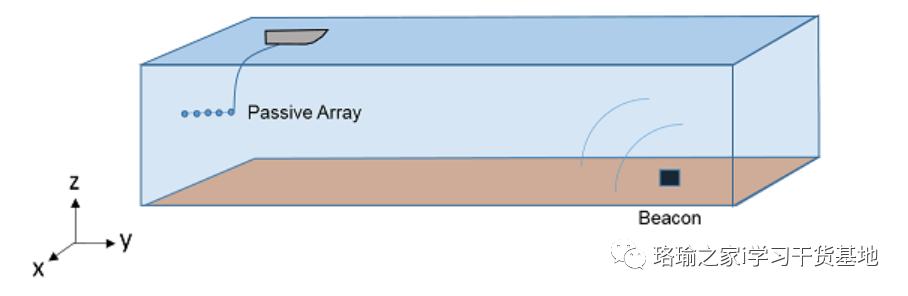
首先, 创建一个多路径通道以在信标和无源阵列之间传输信号.考虑十条传播路径,包括直接路径和来自顶部和底部表面的反射。生成的路径将由多路径通道 使用 ,来模拟信号传播。
三、定义声学信标和无源阵列
3.1 声信标波形
定义声信标发出的波形.波形是具有1秒重复间隔和10毫秒宽度的矩形脉冲。
3.2 声学信标
接下来, 定义声学信标, 它位于通道底部上方 1 米处.声学信标被建模为各向同性投影仪.声信标波形将被辐射到远场.
3.3 被动拖曳阵列
无源拖曳阵列将检测和定位 ping 的来源,并建模为具有半波长间距的五元素线性阵列。无源阵列在 y 方向上的速度为 1 m/s。阵列轴的方向平行于行进方向。
为每个水听器元件定义接收器放大器。选择20 dB的增益和10 dB的噪声系数。
四、模拟被动声纳系统
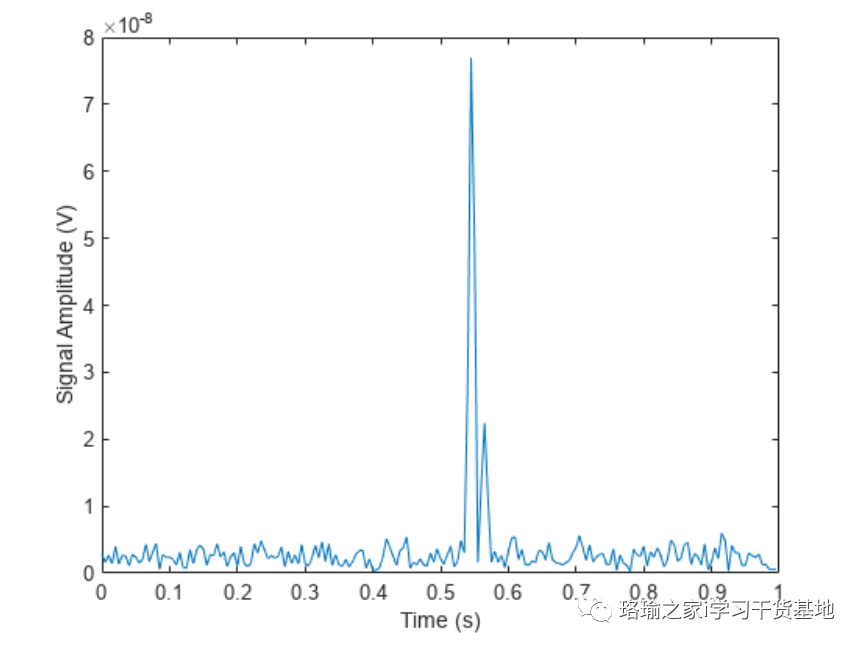
激活声音信标并传输十次ping。在传播延迟之后,ping在阵列的接收信号中显示为峰值。
绘制上次接收到的脉冲。由于有多个传播路径,每个ping都是多个脉冲的叠加。
五、估计到达方向
估计声学信标相对于阵列的到达方向.创建一个 MUSIC 估计器对象,指定单个源信号和到达方向作为输出。使用间距为 0.1 度的扫描角度网格。
接下来,收集 ping 500 多个重复间隔。估计每个重复间隔的到达方向,并将估计值与真实到达方向进行比较。
绘制每个脉冲重复间隔的估计到达角和真实到达方向。
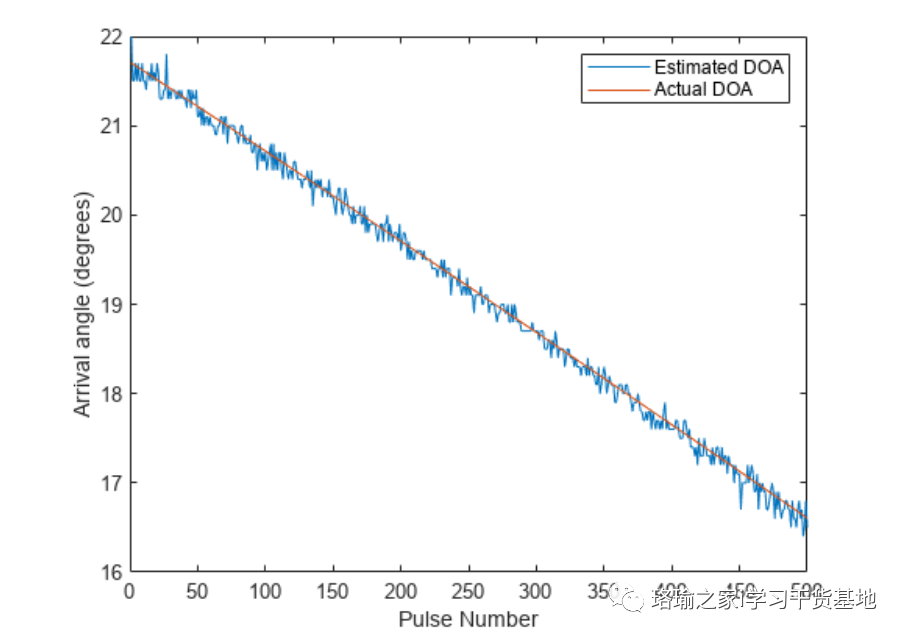
估计和实际到达方向同意在不到一度。
六、总结
在本例中,在浅水通道中模拟了信标和无源阵列之间的声学ping传输。每个ping都沿着十个声学路径接收。信标的到达方向相对于每个接收的ping的无源阵列进行估计,并与真实的到达方向进行比较。到达方向可用于定位和恢复信标.
七、参考文献
Urick, Robert. Principles of Underwater Sound. Los Altos, California: Peninsula Publishing, 1983.
八、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
打开下面的“XXX.mlx”文件,点击运行,就可以看到上述效果。
程序下载:https://download.csdn.net/download/weixin_45770896/87666407