目录
1 ROS概述
2 ROS通信机制
问题:服务通信概念
问题:服务通信理论模型
3 常见面试题
问题:roslaunch和rosrun区别?
问题:什么是ROS?
问题:ROS中的节点是什么?
问题:ROS的消息通信机制是什么?
问题:如何创建ROS的工作空间?
问题:ROS中常用的机器人控制库有哪些?
问题:ROS中如何进行机器人导航?
问题:ROS中如何进行机器人感知?
问题:ROS中如何进行图像处理?
问题:如何调试ROS程序?
问题:如何使用ROS开发机器人控制程序?
问题:ROS中的rospy和roscpp有什么区别?
持续更新中...
1 ROS概述
2 ROS通信机制
问题:服务通信概念
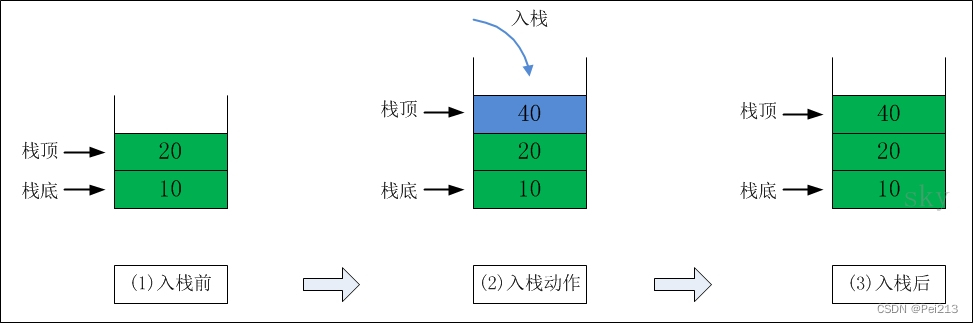
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即: 一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。
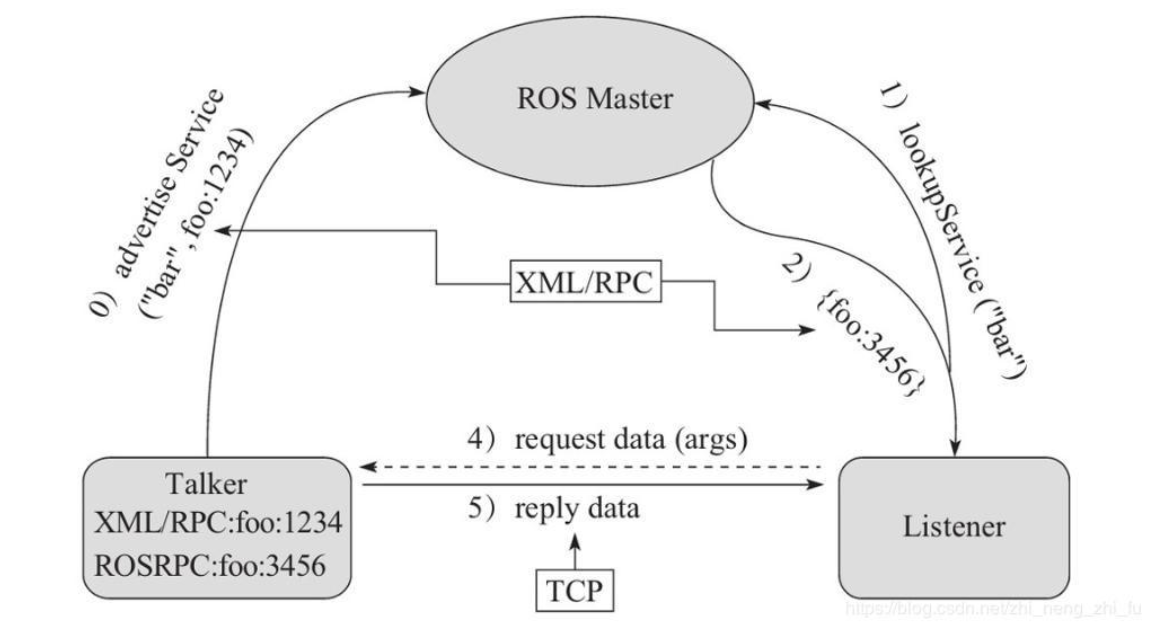
问题:服务通信理论模型
服务通信到三个角色:ROS master(管理者)、Server(服务端)、Client(客户端)。ROS Master 负责保管 Server 和 Client 注册的信息,并匹配话题相同的 Server 与 Client ,帮助 Server 与 Client 建立连接,连接建立后,Client 发送请求信息,Server 返回响应信息。
3 常见面试题
问题:roslaunch和rosrun区别?
-
roslaunch可以启动多个节点和包,而rosrun只能启动一个节点和包。
-
roslaunch可以在启动节点时设置参数,而rosrun不能。
-
roslaunch可以启动多个节点之间的依赖关系和顺序,而rosrun不能。
综上所述,roslaunch比rosrun更加灵活和强大,可以更好地管理ROS节点和包之间的关系。
问题:什么是ROS?
ROS(Robot Operating System)是一个开源的机器人操作系统,可以提供常见的机器人功能,如硬件抽象、底层设备控制、常用功能实现、进程间通信、程序打包、工具箱、可视化、调试等。
问题:ROS中的节点是什么?
节点是ROS中最基本的软件单元,可以是一个实际的硬件设备、一个算法、一个控制器等。节点通过ROS的通信机制进行信息交换和数据传输。
问题:ROS的消息通信机制是什么?
ROS中的消息通信机制是基于发布/订阅模式的。节点可以发布消息到某一个话题(Topic),其他节点可以订阅这个话题并接收消息。此外,ROS还支持服务(Service)和参数(Parameter)的通信方式。
问题:如何创建ROS的工作空间?
可以通过使用catkin工具来创建ROS的工作空间。具体步骤如下:
1)创建工作空间目录:mkdir -p catkin_ws/src
2)进入src目录:cd catkin_ws/src
3)创建一个包:catkin_create_pkg my_package rospy
4)回到工作空间目录:cd ..
5)编译工作空间:catkin_make
问题:ROS中常用的机器人控制库有哪些?
ROS中常用的机器人控制库包括:MoveIt、Gazebo、RViz、ROS Control等。其中,MoveIt是用于机器人运动规划和控制的库;Gazebo是一个强大的机器人仿真器;RViz是一个3D可视化工具;ROS Control是用于机器人控制的库。
问题:ROS中如何进行机器人导航?
在ROS中,可以使用Navigation Stack来进行机器人导航。Navigation Stack包括多个子系统,如地图构建、自定位、路径规划和控制等。它可以帮助机器人在未知环境中进行自主导航。
问题:ROS中如何进行机器人感知?
在ROS中,可以使用多种传感器来进行机器人感知,如激光传感器、摄像头、深度相机等。可以使用ROS中的sensor_msgs包来处理传感器数据,并使用自定义的节点来进行数据处理和分析。
问题:ROS中如何进行图像处理?
在ROS中,可以使用OpenCV等图像处理库来进行图像处理。可以使用ROS的图像传输机制将摄像头、深度相机等设备捕获的图像数据传输到ROS节点中,并使用OpenCV等库进行图像处理和分析。
问题:如何调试ROS程序?
可以使用ROS的调试工具来调试ROS程序,如roslaunch、rosrun、rqt等。其中,roslaunch可以启动多个节点,并设置参数;rosrun可以启动单个节点;rqt可以用于可视化调试和数据分析。
问题:如何使用ROS开发机器人控制程序?
可以使用ROS的控制库和机器人模型库来开发机器人控制程序。可以使用ROS Control包来进行机器人控制,使用Gazebo进行机器人仿真,使用URDF(Unified Robot Description Format)来描述机器人模型。可以使用Python、C++等编程语言进行开发。
问题:ROS中的rospy和roscpp有什么区别?
rospy是ROS的Python客户端库,而roscpp是ROS的C++客户端库。两者的功能和使用方式类似,但是语言不同。





![[IAR][CC2642R1] IDE安装和环境搭建,CC2642的环境配置](https://img-blog.csdnimg.cn/8096d9797f4a4cada41add3c8fb19ef0.png)