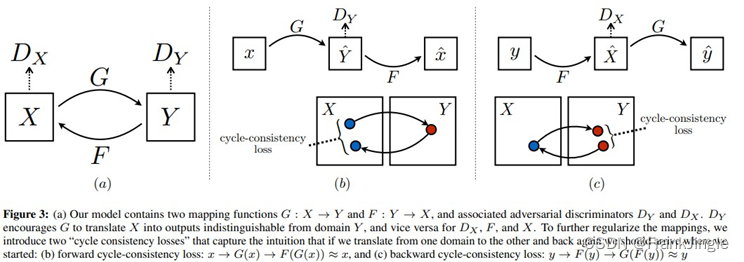
CycleGAN是一个里程碑式的工作,开启了unpaired的风格迁移的先河,斑马转马的效果还是很震惊。
具体原理可以参考 https://zhuanlan.zhihu.com/p/402819206
老习惯,直接上code,然后按照code进行一些解释
代码参考自 https://github.com/aitorzip/PyTorch-CycleGAN 相对比较简洁,我进行了一些小修改
import os
# os.chdir(os.path.dirname(__file__))
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torchvision
from torchvision import transforms
from torchvision import datasets
from torchvision import models
from torch.utils.tensorboard import SummaryWriter
import numpy as np
from PIL import Image
import argparse
from glob import glob
import random
import itertools
## from https://github.com/aitorzip/PyTorch-CycleGAN
sample_dir = 'samples_cycle_gan'
if not os.path.exists(sample_dir):
os.makedirs(sample_dir, exist_ok=True)
writer = SummaryWriter(sample_dir)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
np.random.seed(0)
torch.manual_seed(0)
class ImageDataset(torch.utils.data.Dataset):
def __init__(self, root, transforms=None, unaligned=False, mode='train'):
self.transforms = transforms
self.unaligned = unaligned
self.files_A = sorted(glob(os.path.join(root, mode, 'A', '*.*')))
self.files_B = sorted(glob(os.path.join(root, mode, 'B', '*.*')))
def __getitem__(self, idx):
img = Image.open(self.files_A[idx % len(self.files_A)]).convert('RGB')
itemA = self.transforms(img)
if self.unaligned:
rand_idx = random.randint(0, len(self.files_B)-1)
img = Image.open(self.files_B[rand_idx]).convert('RGB')
itemB = self.transforms(img)
else:
img = Image.open(self.files_B[idx % len(self.files_B)]).convert('RGB')
itemB = self.transforms(img)
return {
'A' : itemA,
'B' : itemB
}
def __len__(self):
return max(len(self.files_A), len(self.files_B))
class ResidualBlock(nn.Module):
def __init__(self, in_features):
super(ResidualBlock, self).__init__()
self.conv_block = nn.Sequential(
nn.ReflectionPad2d(1),
nn.Conv2d(in_features, in_features, 3),
nn.InstanceNorm2d(in_features),
nn.ReLU(inplace=True),
nn.ReflectionPad2d(1),
nn.Conv2d(in_features, in_features, 3),
nn.InstanceNorm2d(in_features)
)
def forward(self, x):
return x + self.conv_block(x)
class Generator(nn.Module):
def __init__(self, input_nc, output_nc, n_res_blocks=9):
super(Generator, self).__init__()
# init basic conv block
model = [
nn.ReflectionPad2d(3),
nn.Conv2d(input_nc, 64, 7),
nn.InstanceNorm2d(64),
nn.ReLU(inplace=True)
]
# downsampling
in_features = 64
out_features = in_features * 2
for _ in range(2):
model += [
nn.Conv2d(in_features, out_features, 2, stride=2, padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True)
]
in_features = out_features
out_features = in_features * 2
# residual blocks
for _ in range(2):
model += [ResidualBlock(in_features)]
# upsampling
out_features = in_features //2
for _ in range(2):
model += [
nn.ConvTranspose2d(in_features, out_features, 3, stride=2, padding=1, output_padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True)
]
in_features = out_features
out_features = in_features //2
# output layer
model += [
nn.ReflectionPad2d(3),
nn.Conv2d(64, output_nc, 11),
nn.Tanh()
]
self.model = nn.Sequential(*model)
def forward(self, x):
return self.model(x)
class Discriminator(nn.Module):
def __init__(self, input_nc):
super(Discriminator, self).__init__()
# A bunch of convolutions one after another
self.model = nn.Sequential(
nn.Conv2d(input_nc, 64, 4, stride=2, padding=1),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(64, 128, 4, stride=2, padding=1),
nn.InstanceNorm2d(128),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(128, 256, 4, stride=2, padding=1),
nn.InstanceNorm2d(256),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(256, 512, 4, padding=1),
nn.InstanceNorm2d(512),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(512, 1, 4, padding=1)
)
def forward(self, x):
x = self.model(x)
# average pooling and flatten
return F.avg_pool2d(x, x.size()[2:]).view(x.size()[0], -1)
class ReplayBuffer():
def __init__(self, max_size=50):
assert (max_size > 0), 'Empty buffer or trying to create a black hole. Be careful.'
self.max_size = max_size
self.data = []
def push_and_pop(self, data):
to_return = []
for element in data.data:
element = torch.unsqueeze(element, 0)
if len(self.data) < self.max_size:
self.data.append(element)
to_return.append(element)
else:
if random.uniform(0,1) > 0.5:
i = random.randint(0, self.max_size-1)
to_return.append(self.data[i].clone())
self.data[i] = element
else:
to_return.append(element)
return torch.cat(to_return)
class LambdaLR():
def __init__(self, n_epochs, offset, decay_start_epoch):
assert ((n_epochs - decay_start_epoch) > 0), "Decay must start before the training session ends!"
self.n_epochs = n_epochs
self.offset = offset
self.decay_start_epoch = decay_start_epoch
def step(self, epoch):
return 1.0 - max(0, epoch + self.offset - self.decay_start_epoch)/(self.n_epochs - self.decay_start_epoch)
def weights_init_normal(m):
classname = m.__class__.__name__
if classname.find('Conv') != -1:
torch.nn.init.normal(m.weight.data, 0.0, 0.02)
elif classname.find('BatchNorm2d') != -1:
torch.nn.init.normal(m.weight.data, 1.0, 0.02)
torch.nn.init.constant(m.bias.data, 0.0)
def denorm(x):
out = (x+1)/2
return out.clamp(0, 1)
# Networks
input_nc = 3
output_nc = 3
learning_rate = 0.0002
n_epochs = 200
decay_epoch = 100
start_epoch = 0
batch_size = 16
input_size = 256
dataroot = 'data/cycle_gan/datasets/horse2zebra'
netG_A2B = Generator(input_nc, output_nc).to(device)
netG_B2A = Generator(output_nc, input_nc).to(device)
netD_A = Discriminator(input_nc).to(device)
netD_B = Discriminator(output_nc).to(device)
netG_A2B.apply(weights_init_normal)
netG_B2A.apply(weights_init_normal)
netD_A.apply(weights_init_normal)
netD_B.apply(weights_init_normal)
# Losses
criterion_GAN = torch.nn.MSELoss()
criterion_cycle = torch.nn.L1Loss()
criterion_identity = torch.nn.L1Loss()
# optimizer
optimizer_G = torch.optim.Adam(itertools.chain(netG_A2B.parameters(), netG_B2A.parameters()),
lr=learning_rate, betas=(0.5, 0.999))
optimizer_D_A = torch.optim.Adam(netD_A.parameters(), lr=learning_rate, betas=(0.5, 0.999))
optimizer_D_B = torch.optim.Adam(netD_B.parameters(), lr=learning_rate, betas=(0.5, 0.999))
# lr schedulers
lr_scheduler_G = torch.optim.lr_scheduler.LambdaLR(optimizer_G, lr_lambda=LambdaLR(n_epochs, start_epoch, decay_epoch).step)
lr_scheduler_D_A = torch.optim.lr_scheduler.LambdaLR(optimizer_D_A, lr_lambda=LambdaLR(n_epochs, start_epoch, decay_epoch).step)
lr_scheduler_D_B = torch.optim.lr_scheduler.LambdaLR(optimizer_D_B, lr_lambda=LambdaLR(n_epochs, start_epoch, decay_epoch).step)
# Inputs & targets memory allocation
target_real = torch.ones(batch_size, requires_grad=False).to(device)
target_fake = torch.zeros(batch_size, requires_grad=False).to(device)
# Dataset loader
transforms_data = transforms.Compose([
transforms.Resize(int(input_size*1.12), Image.BICUBIC),
transforms.RandomCrop(input_size),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.5,0.5,0.5), (0.5,0.5,0.5))
])
dataset = ImageDataset(dataroot, transforms=transforms_data, unaligned=True)
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True, num_workers=16, drop_last=True)
fake_A_buffer = ReplayBuffer()
fake_B_buffer = ReplayBuffer()
###### Training ######
cnt = 0
log_step = 10
for epoch in range(start_epoch, n_epochs):
for i, batch in enumerate(dataloader):
# set model input
real_A = batch['A'].to(device)
real_B = batch['B'].to(device)
###### Generators ######
# generators A2B and B2A
optimizer_G.zero_grad()
### identity loss
# G_A2B(B) should equal B if real B is fed
same_B = netG_A2B(real_B)
loss_identity_B = criterion_identity(same_B, real_B) * 5.0
# G_B2A(A) should equal A if real A is fed
same_A = netG_B2A(real_A)
loss_identity_A = criterion_identity(same_A, real_A) * 5.0
### GAN loss
fake_B = netG_A2B(real_A)
pred_fake = netD_B(fake_B)
loss_GAN_A2B = criterion_GAN(pred_fake, target_real)
fake_A = netG_B2A(real_B)
pred_fake = netD_A(fake_A)
loss_GAN_B2A = criterion_GAN(pred_fake, target_real)
### Cycle loss
recovered_A = netG_B2A(fake_B)
loss_cycle_ABA = criterion_cycle(recovered_A, real_A) * 10.0
recovered_B = netG_A2B(fake_A)
loss_cycle_BAB = criterion_cycle(recovered_B, real_B) * 10.0
# Total loss
loss_G = loss_identity_A + loss_identity_B + loss_GAN_A2B + loss_GAN_B2A + loss_cycle_ABA + loss_cycle_BAB
loss_G.backward()
optimizer_G.step()
###################################
###### Discriminator A ######
optimizer_D_A.zero_grad()
# real loss
pred_real = netD_A(real_A)
loss_D_real = criterion_GAN(pred_real, target_real)
# fake loss
fake_A = fake_A_buffer.push_and_pop(fake_A)
pred_fake = netD_A(fake_A)
loss_D_fake = criterion_GAN(pred_fake, target_fake)
# total loss
loss_D_A = (loss_D_real + loss_D_fake) * 0.5
loss_D_A.backward()
optimizer_D_A.step()
###### Discriminator B ######
optimizer_D_B.zero_grad()
# real loss
pred_real = netD_B(real_B)
loss_D_real = criterion_GAN(pred_real, target_real)
# fake loss
fake_B = fake_B_buffer.push_and_pop(fake_B)
pred_fake = netD_B(fake_B)
loss_D_fake = criterion_GAN(pred_fake, target_fake)
# total loss
loss_D_B = (loss_D_real + loss_D_fake) * 0.5
loss_D_B.backward()
optimizer_D_B.step()
cnt += 1
if cnt % log_step == 0:
print('Epoch [{}/{}], Step [{}], LossG: {:.4f}, loss_D_A: {:.4f}, loss_D_B: {:.4f}'.\
format(epoch, n_epochs, cnt, loss_G.item(), loss_D_A.item(), loss_D_B.item()))
writer.add_scalar('LossG', loss_G.item(), global_step=cnt)
writer.add_scalar('loss_D_A', loss_D_A.item(), global_step=cnt)
writer.add_scalar('loss_D_B', loss_D_B.item(), global_step=cnt)
if cnt % 100 == 0:
writer.add_images('real_A', denorm(real_A), global_step=cnt)
writer.add_images('fake_A', denorm(fake_A), global_step=cnt)
writer.add_images('recovered_A', denorm(recovered_A), global_step=cnt)
writer.add_images('real_B', denorm(real_B), global_step=cnt)
writer.add_images('fake_B', denorm(fake_B), global_step=cnt)
writer.add_images('recovered_B', denorm(recovered_B), global_step=cnt)
# Update learning rates
lr_scheduler_G.step()
lr_scheduler_D_A.step()
lr_scheduler_D_B.step()
# Save models checkpoints
torch.save(netG_A2B.state_dict(), sample_dir + '/netG_A2B.pth')
torch.save(netG_B2A.state_dict(), sample_dir + '/netG_B2A.pth')
torch.save(netD_A.state_dict(), sample_dir + '/netD_A.pth')
torch.save(netD_B.state_dict(), sample_dir + '/netD_B.pth')
我们来根据代码进行解读, 首先一个样本里是包含了A和B两张图,称为real_A 和 real_B。
定义了生成网络netG_A2B和 netG_B2A
先看Generators 部分
###### Generators ######
# generators A2B and B2A
optimizer_G.zero_grad()
### identity loss
# G_A2B(B) should equal B if real B is fed
same_B = netG_A2B(real_B)
loss_identity_B = criterion_identity(same_B, real_B) * 5.0
# G_B2A(A) should equal A if real A is fed
same_A = netG_B2A(real_A)
loss_identity_A = criterion_identity(same_A, real_A) * 5.0
### GAN loss
fake_B = netG_A2B(real_A)
pred_fake = netD_B(fake_B)
loss_GAN_A2B = criterion_GAN(pred_fake, target_real)
fake_A = netG_B2A(real_B)
pred_fake = netD_A(fake_A)
loss_GAN_B2A = criterion_GAN(pred_fake, target_real)
### Cycle loss
recovered_A = netG_B2A(fake_B)
loss_cycle_ABA = criterion_cycle(recovered_A, real_A) * 10.0
recovered_B = netG_A2B(fake_A)
loss_cycle_BAB = criterion_cycle(recovered_B, real_B) * 10.0
# Total loss
loss_G = loss_identity_A + loss_identity_B + loss_GAN_A2B + loss_GAN_B2A + loss_cycle_ABA + loss_cycle_BAB
loss_G.backward()
optimizer_G.step()
生成网络包含三部分的loss
- identity loss。netG_A2B 是把A风格图像转换为B风格,那么我们应该保证把B风格图像丢进去,出来的依然是B风格的原图,这部分loss就叫 identity loss,同理,对于netG_B2A也由此约束。
- GAN loss。就是场景的generator的loss,对亮哥generator而言,生成的fake图像应该让他label误判为real 的label。
- cycle loss。把A丢进netG_A2B,生成B风格图后,再丢进netG_B2A,理论上应该转换回A风格,这部分约束就是cycle loss,同理,对于netG_B2A也由此约束。
再看DiscriminatorA 部分, DiscriminatorB同理。
就是正常GAN里的Discriminator loss,应该把真的识别为真,假的识别为假。
optimizer_D_A.zero_grad()
# real loss
pred_real = netD_A(real_A)
loss_D_real = criterion_GAN(pred_real, target_real)
# fake loss
fake_A = fake_A_buffer.push_and_pop(fake_A)
pred_fake = netD_A(fake_A)
loss_D_fake = criterion_GAN(pred_fake, target_fake)
# total loss
loss_D_A = (loss_D_real + loss_D_fake) * 0.5
loss_D_A.backward()
optimizer_D_A.step()
可以再看看Generator的网络部分,
整体结构跟fast style transfer 非常像,也是先降采样,再residual,最后上采样,并且也用了ReflectionPad2d。
并且代码里用的是nn.InstanceNorm2d
Discriminator就没太多可说的了,几层卷积下来,变成一个batchsize * 1 * h * w 的tensor,最后用一个avg_pool2d得到batchsize * 1 的分类结果,没有用全连接层。
里面还需要提一下的,是用了一个ReplayBuffer机制,我的理解是在做分类的时候把fakeA和fakeB扔进buffer里,然后取出一个buffer里存的来,这样做分类的时候引入了别的batch里的数据,我猜测可能是为了避免discriminator能力集中在区分这种一对对的样本上,而是变得可以见到更多正负样本对。
不过也是因为这个机制,导致我训练的时候打印出的原图和fake图不是一一对应的,不方便看效果,不过这个很容易修改,我就偷懒了。
我们看效果 A是普通马,B是斑马
转换之后,这是变普遍马的效果

这是变斑马的效果

不算特别好,比文章的效果差远了,应该还有很多地方需要调优的,建议想要文章效果的童鞋试试官方代码 https://github.com/junyanz/pytorch-CycleGAN-and-pix2pix


![[附源码]Python计算机毕业设计Django的中点游戏分享网站](https://img-blog.csdnimg.cn/36a3bc58350c46de92774c4cd3487ee0.png)





![[附源码]Python计算机毕业设计SSM流浪宠物申领信息平台(程序+LW)](https://img-blog.csdnimg.cn/98751b97819a49f6b9c2fed0692f2b1c.png)



![[NAS] QNAP/威联通 常用设置和操作](https://img-blog.csdnimg.cn/cb4d601b67b34898b0e79ea6ca18f0d5.png)