论文地址:Delving into Localization Errors for Monocular 3D Object Detection
Github地址:Delving into Localization Errors for Monocular 3D Object Detection
1. 解决了什么问题?
从单目图像准确地估计 3D 框是自动驾驶领域的重要功能,但很具有挑战性。本文以 CenterNet 为基线模型,逐个地将预测项替换为 ground-truths。为了更好地分析误差的规律,作者以深度范围的方式做评测,在下图展示了各实验的结果。下图是在 KITTI 验证集上做的评测,用 Car 类别的
AP
40
\text{AP}_{40}
AP40作为指标,采样区间是
10
m
10m
10m。比如,横轴上的
20
20
20表示样本的整体表现在
15
m
15m
15m到
25
m
25m
25m区间。作者有三点发现:

- 使用 ground-truth location 时,表现的提升最明显,甚至接近 LiDAR 方法的表现,这说明定位误差是制约 3D 检测的关键因素。此外,除了深度估计,检测到 3D 目标的投影中心点对于恢复目标的 3D 位置也很重要。CenterNet 将 2D 框中心点当作 3D 框在图像平面的投影中心,然后用预测的深度和相机参数反投回到 3D 空间。但是,2D 框中心和 3D 框的中心并不一样,于是,作者探讨了 2D 框中心和 3D 目标投影中心不对齐的问题,认为应该在单目 3D 检测器中保留 2D 检测分支,用 3D 投影中心替换 2D 框的中心能提升定位的准确率。2D 检测作为辅助任务,有助于特征学习。
- 随着目标的距离增大,检测准确率会显著降低。超过一定的距离后,所有的模型都无法准确预测目标。作者发现,现有的方法都受到定位误差影响,无法准确地检出远距离物体。因此,作者认为可以从训练集中去除这些目标。“坏”样本和“容易检测”的样本之间有明显的域差异,强迫网络学习这些样本会降低其表征能力,不利于网络的整体表现。于是作者将远距离样本从训练集中剔除,并降低这些样本的损失权重。
- 除了定位误差,尺寸估计也束缚了单目 3D 检测的表现(即便用了 ground-truth location,仍有 27.4 % 27.4\% 27.4%的提升空间)。现有的方法单独优化 3D 框的每个部分,但没有在一个最终的度量(即 3D IoU)里考虑每个损失项,这种优化并不是最优的。于是作者提出了 IoU 朝向损失来做尺寸预测。该损失根据样本的每一个面对 3D IoU 的贡献,动态地调节它的损失权重。
2. 提出了什么方法?
本文通过大量的消融实验,对每个子任务做定量分析,发现定位误差是制约单目 3D 检测重要的因素。作者也研究了造成定位误差的底层原因,分析它们带来的问题,从而提出了三个策略。
- 2D 框中心点和 3D 目标的投影中心点之间存在不对齐的问题,这会造成定位准确率偏低。
- 用现有的方法要想定位远距离物体,几乎是不可能的,远距离目标会误导网络的学习。作者认为应将这些样本从训练数据集中去除,从而提升检测器的整体表现。
- 针对目标的尺寸估计任务,作者提出了 3D IoU 朝向损失,它不会受到“定位误差”影响。
2.1 问题定义
给定一张 RGB 图像及相机参数,我们要对 3D 空间中感兴趣的目标做分类和定位。每个目标都有它的类别、2D 框 B 2 D \bf{B}_{2D} B2D、3D 框 B 3 D \bf{B}_{3D} B3D。 B 2 D \bf{B}_{2D} B2D用中心点 c i = [ x ′ , y ′ ] 2 D \mathbf{c^i}=[x',y']_{2D} ci=[x′,y′]2D和图像平面的尺寸 [ h ′ , w ′ ] 2 D [{h',w'}]_{2D} [h′,w′]2D表示,而 B 3 D \bf{B}_{3D} B3D用它在 3D 世界空间的中心 [ x , y , z ] 3 D [x,y,z]_{3D} [x,y,z]3D、尺寸 [ h , w , l ] 2 D [h,w,l]_{2D} [h,w,l]2D和朝向角 γ \gamma γ表示。
2.2 基线模型
架构
作者基于单阶段 anchor-free 的 CenterNet 构建基线模型。主干网络为 DLA-34,它平衡了速度和精度。然后是七个轻量级的 heads(由一个 3 × 3 3\times 3 3×3卷积层和 1 × 1 1\times 1 1×1卷积层实现),分别用于 2D 检测和 3D 检测。
2D 检测
模型输出热力图,表示分类得分和目标大概的中心位置 c = ( u , v ) \mathbf{c}=(u,v) c=(u,v)。 c \mathbf{c} c用 ground-truth 2D 框的中心点的坐标监督。另一个分支则预测 c \mathbf{c} c和实际中心位置的偏移量 o i = ( Δ u i , Δ v i ) \mathbf{o^i}=(\Delta{u^i},\Delta{v^i}) oi=(Δui,Δvi),然后得到最终的 2D 框中心坐标 c i = c + o i \mathbf{c^i}=\mathbf{c}+\mathbf{o^i} ci=c+oi。最后,还有一个分支预测 2D 框的尺寸 [ w ′ , h ′ ] 2 D [w',h']_{2D} [w′,h′]2D。
3D 检测
一个分支预测
c
\mathbf{c}
c和 3D 框中心投影
c
w
\mathbf{c^w}
cw(
c
w
=
[
x
w
,
y
w
]
T
=
c
+
o
w
\mathbf{c^w}=[x^w, y^w]^T=\mathbf{c}+\mathbf{o^w}
cw=[xw,yw]T=c+ow) 之间的偏移量
o
w
=
(
Δ
u
w
,
Δ
v
w
)
\mathbf{o^w}=(\Delta{u^w},\Delta{v^w})
ow=(Δuw,Δvw)。通过相机参数
K
∈
R
3
×
3
\mathbf{K}\in \mathbb{R}^{3\times 3}
K∈R3×3,我们可以恢复 3D 世界中目标的中心位置:
[
x
y
z
]
3
D
=
K
−
1
[
c
w
⋅
z
z
]
=
K
−
1
[
x
w
⋅
z
y
w
⋅
z
z
]
2
D
\left[\begin{array}{c} x\\ y \\ z \end{array}\right]_{3D}=\mathbf{K^{-1}} \left[\begin{array}{c} \mathbf{c^w}\cdot z\\ z \end{array}\right]=\mathbf{K^{-1}}\left[\begin{array}{c} x^w \cdot z\\ y^w \cdot z \\ z \end{array}\right]_{2D}
xyz
3D=K−1[cw⋅zz]=K−1
xw⋅zyw⋅zz
2D
z
z
z是深度分支预测的值。其余两个分支分别预测 3D 尺寸
[
h
,
w
,
l
]
3
D
[h,w,l]_{3D}
[h,w,l]3D和朝向角
γ
\gamma
γ。
损失
总共有七项损失,一个用于正负样本分类,两个(中心位置和尺寸)用于 2D 检测,四个(中心位置、深度、尺寸、朝向角)用于 3D 检测。
- 分类任务使用了 Focal Loss。
- 对于 2D 检测的中心位置和尺寸回归,使用了 L1 损失。
- 对于 3D 检测,
- 用不确定性建模深度估计,
- 3D 中心坐标优化采用了 L1 损失,
- 朝向角估计使用了 multi-bin loss(考虑了 12 12 12个不重叠的 bins),
- 尺寸估计使用了 L1 损失,以及本文提出的 IoU 损失。
所有损失项权重都是 1 1 1。
2.3 误差分析
作者探究了制约单目 3D 检测表现的因素。作者在 KITTI 验证集上进行误差分析,将每一项预测结果替换为 ground-truths,然后评测其表现。如上表所示,如果将预测的 3D 中心
c
w
\mathbf{c^w}
cw替换为 ground-truths,准确率从
11.12
%
11.12\%
11.12%提升到了
18.97
%
18.97\%
18.97%。此外,ground-truth 深度值可以将准确率提升至
38.01
%
38.01\%
38.01%。如果深度和 3D 中心投影都考虑了,再将预测 3D 坐标
[
x
,
y
,
z
]
3
D
[x,y,z]_{3D}
[x,y,z]3D替换为 ground-truths 能带来最显著的提升。所以作者认为,单目 3D 检测效果差,主要是定位误差造成的。根据上式,深度估计和中心位置一起决定了 3D 空间内目标的位置。在单目图像中做深度估计是不适当的,优化中心点的检测效果是更加合理的努力方向。

上表展示了图像平面(以像素为单位)上中心点偏移造成的定位误差(以米为单位)。KITTI 数据集中,cars 的平均尺寸
[
h
,
w
,
l
]
3
D
[h,w,l]_{3D}
[h,w,l]3D为
[
1.53
m
,
1.63
m
,
3.53
m
]
[1.53m,1.63m,3.53m]
[1.53m,1.63m,3.53m]。假设其它的度量都是对的,用长度
l
l
l来对齐定位误差,IoU 计算过程为:
I
o
U
=
3.53
−
Δ
l
o
c
3.53
+
Δ
l
o
c
IoU=\frac{3.53 - \Delta_{loc}}{3.53+\Delta_{loc}}
IoU=3.53+Δloc3.53−Δloc
其中
Δ
l
o
c
\Delta_{loc}
Δloc表示定位误差。IoU 阈值设定为
0.7
0.7
0.7,因此理论可接受的最大误差是
0.62
m
0.62m
0.62m。但是,图像上
4
∼
8
4\sim8
4∼8个像素(
4
×
4\times
4×下采样的特征图上
1
∼
2
1\sim 2
1∼2像素)的误差都会造成相距
60
m
60m
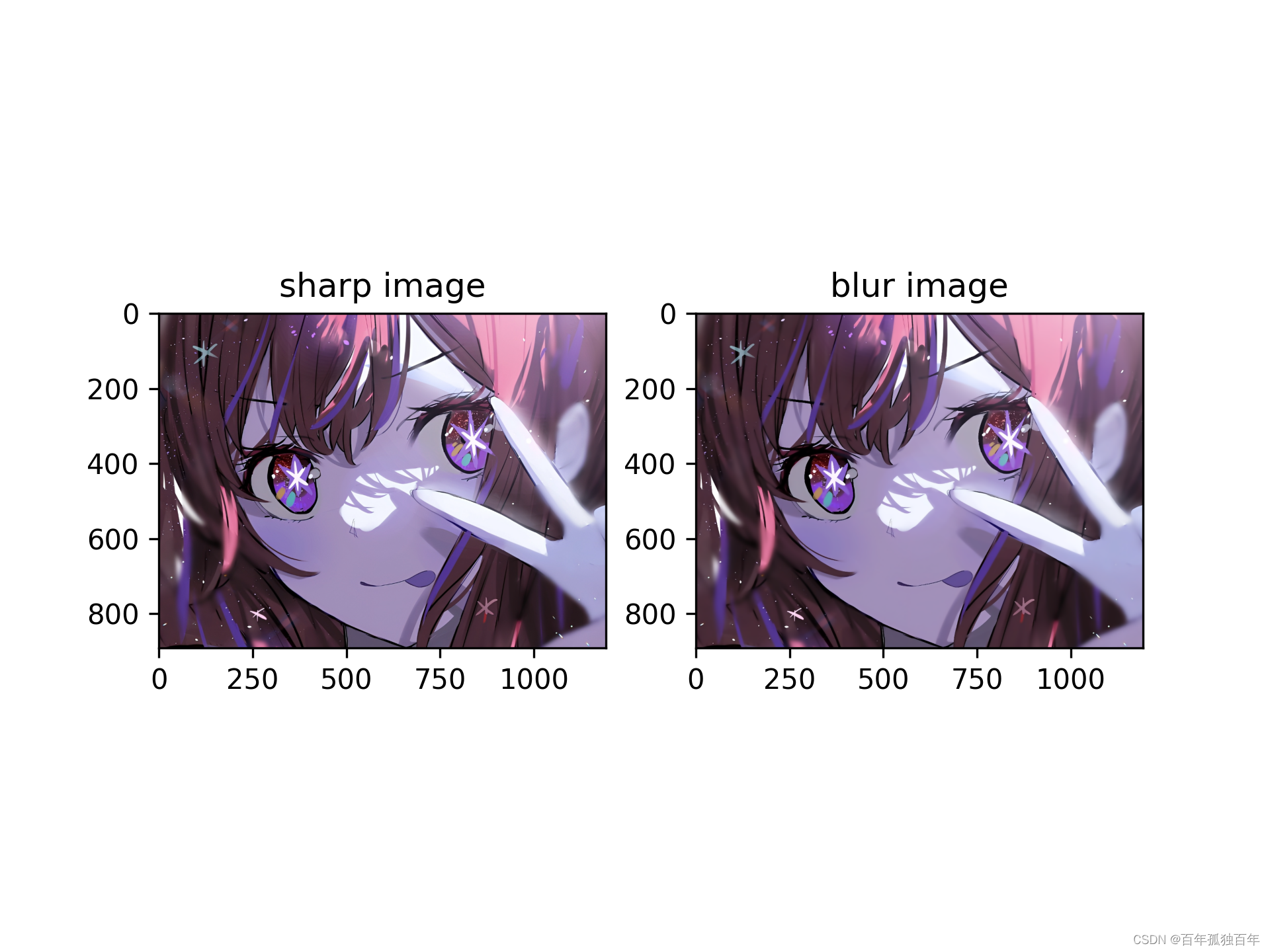
60m的物体无法被准确检测到。再加上其它任务的误差(比如下图的深度估计误差),要想在单目图像上准确地检测远距离 3D 物体几乎就是不可能的,除非深度信息是非常准确的。下图的上半部分是 2D 框中心和 3D 投影到图像平面的中心不对齐的现象(以像素为单位,来源于 KITTI trainval 集);下半部分是深度误差(以米为单位,用 KITTI 训练集训练,在验证集测试)。

2.4 Revisiting Center Detection
Our design for center detection
为了预测目标大概的中心位置 c \mathbf{c} c,本文提出的方法很简单。
- 将投影 3D 中心点 c w \mathbf{c^w} cw作为预测中心位置 c \mathbf{c} c分支的 ground-truths,
- 迫使模型同时去学习 2D 检测的特征。
这些设计来自于下面的分析: - 分析1:如下图所示(红色为 3D 投影中心,蓝色为 2D 框中心),在 2D 框中心 c i \mathbf{c^i} ci和 3D 框中心投影 c w \mathbf{c^w} cw之间存在不对齐的现象。3D 投影中心点 c w \mathbf{c^w} cw是恢复 3D 目标中心 [ x , y , z ] 3 D [x,y,z]_{3D} [x,y,z]3D的关键。那么问题就是 c \mathbf{c} c的监督信号应该是什么。一些论文将 2D 框中心 c i \mathbf{c^i} ci作为标签使用,但 c i \mathbf{c^i} ci和 3D 目标中心的关联并不紧密,使得中心点预测并不清楚目标的 3D 几何信息。因此,作者将 3D 投影中心 c w \mathbf{c^w} cw作为训练 c \mathbf{c} c的 ground-truths。
- 分析2:SMOKE 算法也将 3D 投影中心
c
w
\mathbf{c^w}
cw作为中心点
c
\mathbf{c}
c的 ground-truth 标签。但是它抛弃了 2D 检测分支,而本文选择保留该分支。在本方法中,用 3D 投影中心
c
w
\mathbf{c^w}
cw监督
c
\mathbf{c}
c,也负责监督预测 2D 框的中心
c
i
\mathbf{c^i}
ci。此外,2D 检测分支会预测一个真实 2D 中心和预测中心
c
\mathbf{c}
c之间的偏移量
o
i
=
c
i
−
c
\mathbf{o^i}=\mathbf{c^i}-\mathbf{c}
oi=ci−c。这样,模型就知道了目标的几何信息。然后,还有一个分支预测 2D 框的大小,共享特征就能学到一些有利于深度估计的信息。这样,保留了 2D 检测有助于 3D 特征学习。

2.5 训练样本
本文认为去掉那些极端困难的样本对于单目 3D 检测网络的整体表现是有益的。物体的距离和检测难易程度之间是强关联的。于是,作者设计了两种机制,计算样本 i i i的训练权重 w i w_i wi:
- 硬编码,该机制舍弃那些超出一定距离的样本:
w i = { 1 , if d i ≤ s 0 , if d i > s w_i=\left\{ \begin{aligned} 1,&\quad \text{if} &d_i\leq s \\ 0,&\quad \text{if} &d_i>s \end{aligned} \right. wi={1,0,ififdi≤sdi>s
d i d_i di表示样本 i i i的深度, s s s是深度阈值,在实验中设为 60 m 60m 60m。凡是距离超出 s s s的样本不参与训练。 - 软编码,用近似于 sigmoid 的函数计算,
w i = 1 1 + e ( d i − c ) / T w_i=\frac{1}{1+e^{(d_i-c)/T}} wi=1+e(di−c)/T1
c c c和 T T T是超参数,调节对称中心和弯曲度。当 c = s , T → 0 c=s, T\rightarrow 0 c=s,T→0时,等价于硬编码。当 T → ∞ T\rightarrow \infty T→∞,所有的样本的权重一样。默认 c = 60 , T = 1 c=60,T=1 c=60,T=1。
这两个机制效果差不多。
2.6 IoU Oriented Optimization
在单目 3D 检测中,判断物体的 3D 中心是很难的,定位误差经常能达到几米远。直接用 IoU 损失,会使定位相关的任务(如深度估计)比其它任务(如 3D 尺寸预测)更加重要。然而单目图像做深度估计是不适合的,该矛盾会造成训练的效果比较差。另一方案是将每个损失解耦开来,再独立地优化,但它忽视了损失项彼此之间的联系。于是,作者针对 3D 尺寸预测提出了 IoU oriented 优化方法。假设所有的预测项(除了 3D 尺寸
s
=
[
h
,
w
,
l
]
3
D
\mathbf{s}=[h,w,l]_{3D}
s=[h,w,l]3D)都是对的,我们可得到:
∂
I
o
U
∂
h
:
∂
I
o
U
∂
w
:
∂
I
o
U
∂
l
≈
1
h
:
1
w
:
1
l
\frac{\partial{IoU}}{\partial{h}}:\frac{\partial{IoU}}{\partial{w}}:\frac{\partial{IoU}}{\partial{l}}\approx \frac{1}{h}:\frac{1}{w}:\frac{1}{l}
∂h∂IoU:∂w∂IoU:∂l∂IoU≈h1:w1:l1
该等式证明可见于2.9。因此,我们可以根据 IoU 的偏导数来调节每一项的权重,3D 尺寸估计的损失函数可变形为:
L
s
i
z
e
=
∥
(
s
−
s
∗
)
s
∥
1
\mathcal{L}_{size}=\left\|\frac{(\mathbf{s}-\mathbf{s}^\ast)}{\mathbf{s}}\right\|_1
Lsize=
s(s−s∗)
1
∥
⋅
∥
1
\left\|\cdot\right\|_1
∥⋅∥1表示 L1 范数。注意,与标准的 3D 尺寸损失函数
L
′
s
i
z
e
=
∥
s
−
s
∗
∥
\mathcal{L'}_{size}=\left\|\mathbf{s}-\mathbf{s}^\ast\right\|
L′size=∥s−s∗∥,该新损失的数量级没有改变。重新计算一次
L
′
s
i
z
e
\mathcal{L'}_{size}
L′size,计算补偿权重
w
s
=
∣
L
′
s
i
z
e
/
L
s
i
z
e
∣
w_s=|\mathcal{L'}_{size} / \mathcal{L}_{size}|
ws=∣L′size/Lsize∣,最终损失函数
w
s
⋅
L
s
i
z
e
w_s\cdot \mathcal{L}_{size}
ws⋅Lsize的均值等于
L
′
s
i
z
e
\mathcal{L'}_{size}
L′size。因此,本文提出的损失可以看作为标准 L1 损失的重新排布。
2.7 实现
训练
在两张 GTX 1080Ti 显卡训练,batch size 为 16 16 16,训练了 140 140 140个 epochs。使用 Adam 优化器,初始学习率为 1.25 e − 3 1.25e^{-3} 1.25e−3,在第 90 90 90和 120 120 120个 epoch 时乘以 0.1 0.1 0.1衰减。Weight decay 为 1 e − 5 1e^{-5} 1e−5,在前 5 5 5个 epochs 使用 warmup 策略。为避免过拟合,使用了随机裁剪和缩放(只针对 2D 检测)和随机水平翻转。整个训练花费了 9 9 9个小时。
推理
从两个解码器得到预测结果。使用 3 × 3 3\times 3 3×3最大池化对中心点检测结果做 NMS。然后,恢复出 2D/3D 框,中心点的得分作为预测结果的得分。丢弃那些置信度 < 0.2 <0.2 <0.2的预测结果。
2.8 Uncertainty Modeling
对深度估计使用异方差偶然不确定性建模。同时预测深度
d
\mathbf{d}
d和标准差
σ
\sigma
σ:
[
d
,
σ
]
=
f
w
(
x
)
[\mathbf{d},\sigma]=f^{\mathbf{w}}(\mathbf{x})
[d,σ]=fw(x)
x
\mathbf{x}
x是输入数据,
f
f
f是卷积网络,参数为
w
\mathbf{w}
w。然后,使用 Laplace 似然来建模不确定性,深度估计的损失写作:
L
=
2
σ
∥
d
−
d
∗
∥
1
+
log
σ
\mathcal{L}=\frac{\sqrt{2}}{\sigma}\left\|\mathbf{d-d^\ast}\right\|_1 + \log{\sigma}
L=σ2∥d−d∗∥1+logσ
∥
⋅
∥
1
\left\|\cdot\right\|_1
∥⋅∥1表示 L1 范数,
d
∗
\mathbf{d^\ast}
d∗是 ground-truth 深度值。类似地,高斯似然建模的损失写作:
L
=
1
2
σ
2
∥
d
−
d
∗
∥
2
+
1
2
log
σ
2
\mathcal{L}=\frac{1}{2\sigma^2}\left\|\mathbf{d-d^\ast}\right\|_2 + \frac{1}{2}\log{\sigma}^2
L=2σ21∥d−d∗∥2+21logσ2
∥
⋅
∥
2
\left\|\cdot\right\|_2
∥⋅∥2表示 L2 范数。
从下表可以看到,不确定性建模可以提升深度图的准确率,从而提升整体表现。此外,基于 Laplace 分布建模的不确定性要比高斯分布更适合深度预测任务。

2.9 IoU Oriented Loss
Proposition
假设所有的预测项都是完全正确的(除了 3D 尺寸
(
h
,
w
,
l
)
(h,w,l)
(h,w,l)),3D IoU 每一项的贡献率
∂
I
o
U
∂
h
:
∂
I
o
U
∂
w
:
∂
I
o
U
∂
l
≈
1
h
:
1
w
:
1
l
\frac{\partial{IoU}}{\partial{h}}:\frac{\partial{IoU}}{\partial{w}}:\frac{\partial{IoU}}{\partial{l}}\approx \frac{1}{h}:\frac{1}{w}:\frac{1}{l}
∂h∂IoU:∂w∂IoU:∂l∂IoU≈h1:w1:l1。
证明
给定上述条件,3D IoU 可以写作:
I
o
U
=
Π
i
∈
{
h
,
w
,
l
}
min
(
i
,
i
∗
)
h
×
w
×
l
+
h
∗
×
w
∗
×
l
∗
−
Π
i
∈
{
h
,
w
,
l
}
min
(
i
,
i
∗
)
IoU=\frac{\Pi_{i\in\left\{h,w,l\right\}}\min(i,i^\ast)}{h\times w\times l+h^\ast\times w^\ast\times l^\ast - \Pi_{i\in\left\{h,w,l\right\}}\min(i,i^\ast)}
IoU=h×w×l+h∗×w∗×l∗−Πi∈{h,w,l}min(i,i∗)Πi∈{h,w,l}min(i,i∗)
这里
(
h
∗
,
w
∗
,
l
∗
)
(h^\ast,w^\ast,l^\ast)
(h∗,w∗,l∗)表示预测的 3D 尺寸
(
h
,
w
,
l
)
(h,w,l)
(h,w,l)对应的 ground-truths。对于 3D 尺寸的预测值和 ground-truth 值之间的不同关系,可以分为下述情形:
- 如果 h ≤ h ∗ , w ≤ w ∗ , l ≤ l ∗ h\leq h^\ast,w\leq w^\ast,l\leq l^\ast h≤h∗,w≤w∗,l≤l∗,上式可简化为: I o U = h × w × l h ∗ × w ∗ × l ∗ IoU=\frac{h\times w\times l}{h^\ast \times w^\ast \times l^\ast} IoU=h∗×w∗×l∗h×w×l,计算 3D IoU 关于高度 h h h的偏导 ∂ I o U ∂ h = w × l h ∗ × w ∗ × l ∗ \frac{\partial{IoU}}{\partial{h}}=\frac{w\times l}{h^\ast\times w^\ast\times l^\ast} ∂h∂IoU=h∗×w∗×l∗w×l, ∂ I o U ∂ w , ∂ I o U ∂ l \frac{\partial{IoU}}{\partial{w}},\frac{\partial{IoU}}{\partial{l}} ∂w∂IoU,∂l∂IoU情况类似。然后,将它们的偏导数结合起来,每个的贡献率就是 ∂ I o U ∂ h : ∂ I o U ∂ w : ∂ I o U ∂ l = 1 h : 1 w : 1 l \frac{\partial{IoU}}{\partial{h}}:\frac{\partial{IoU}}{\partial{w}}:\frac{\partial{IoU}}{\partial{l}}= \frac{1}{h}:\frac{1}{w}:\frac{1}{l} ∂h∂IoU:∂w∂IoU:∂l∂IoU=h1:w1:l1。
- 如果 h > h ∗ , w > w ∗ , l > l ∗ h> h^\ast,w> w^\ast,l> l^\ast h>h∗,w>w∗,l>l∗,可以推导出相同的结论。
- 如果 h > h ∗ , w ≤ w ∗ , l ≤ l ∗ h> h^\ast,w\leq w^\ast,l\leq l^\ast h>h∗,w≤w∗,l≤l∗,3D IoU 表示为 I o U = h ∗ × w × l h × w × l + h ∗ × w ∗ × l ∗ − h ∗ × w × l IoU=\frac{h^\ast\times w\times l}{h\times w\times l + h^\ast \times w^\ast \times l^\ast-h^\ast\times w\times l} IoU=h×w×l+h∗×w∗×l∗−h∗×w×lh∗×w×l,计算 3D IoU 关于 h , w , l h,w,l h,w,l的偏导数,可以得到每个的贡献率为 ∂ I o U ∂ h : ∂ I o U ∂ w : ∂ I o U ∂ l = w × l h ∗ × w ∗ × l ∗ : 1 w : 1 l \frac{\partial{IoU}}{\partial{h}}:\frac{\partial{IoU}}{\partial{w}}:\frac{\partial{IoU}}{\partial{l}}= \frac{w\times l}{h^\ast\times w^\ast\times l^\ast}:\frac{1}{w}:\frac{1}{l} ∂h∂IoU:∂w∂IoU:∂l∂IoU=h∗×w∗×l∗w×l:w1:l1。
- 如果
h
>
h
∗
,
w
>
w
∗
,
l
≤
l
∗
h> h^\ast,w> w^\ast,l\leq l^\ast
h>h∗,w>w∗,l≤l∗,可以得到
I
o
U
=
h
∗
×
w
∗
×
l
h
×
w
×
l
+
h
∗
×
w
∗
×
l
∗
−
h
∗
×
w
∗
×
l
IoU=\frac{h^\ast\times w^\ast\times l}{h\times w\times l + h^\ast \times w^\ast \times l^\ast-h^\ast\times w^\ast\times l}
IoU=h×w×l+h∗×w∗×l∗−h∗×w∗×lh∗×w∗×l,3D IoU 关于每一项的贡献率为
∂
I
o
U
∂
h
:
∂
I
o
U
∂
w
:
∂
I
o
U
∂
l
=
1
h
:
1
w
:
h
∗
×
w
∗
×
l
∗
h
×
w
×
l
×
l
\frac{\partial{IoU}}{\partial{h}}:\frac{\partial{IoU}}{\partial{w}}:\frac{\partial{IoU}}{\partial{l}}= \frac{1}{h}:\frac{1}{w}:\frac{h^\ast\times w^\ast\times l^\ast}{h\times w\times l\times l}
∂h∂IoU:∂w∂IoU:∂l∂IoU=h1:w1:h×w×l×lh∗×w∗×l∗。
其它情形与上述第3和第4个类似。当 h ≈ h ∗ , w ≈ w ∗ , l ≈ l ∗ h\approx h^\ast,w\approx w^\ast,l\approx l^\ast h≈h∗,w≈w∗,l≈l∗,可以得到 ∂ I o U ∂ h : ∂ I o U ∂ w : ∂ I o U ∂ l ≈ 1 h : 1 w : 1 l \frac{\partial{IoU}}{\partial{h}}:\frac{\partial{IoU}}{\partial{w}}:\frac{\partial{IoU}}{\partial{l}}\approx \frac{1}{h}:\frac{1}{w}:\frac{1}{l} ∂h∂IoU:∂w∂IoU:∂l∂IoU≈h1:w1:l1。