I 乐视摄像头找不到彩色输出(供参考)
1.安装依赖
sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS_DISTRO-libuvc ros-$ROS_DISTRO-libuvc-camera ros-$ROS_DISTRO-libuvc-ros
2.进入ROS摄像机目录
cd /home/wheeltec/wheeltec_robot/src/ros_astra_camera/
sudo sh ./scripts/create_udev_rules如果遇到 rospack: not found
sudo apt install rospack-toolscd /home/wheeltec/wheeltec_robot/src/ros_astra_camera
sudo sh ./scripts/create_udev_rules3.编译
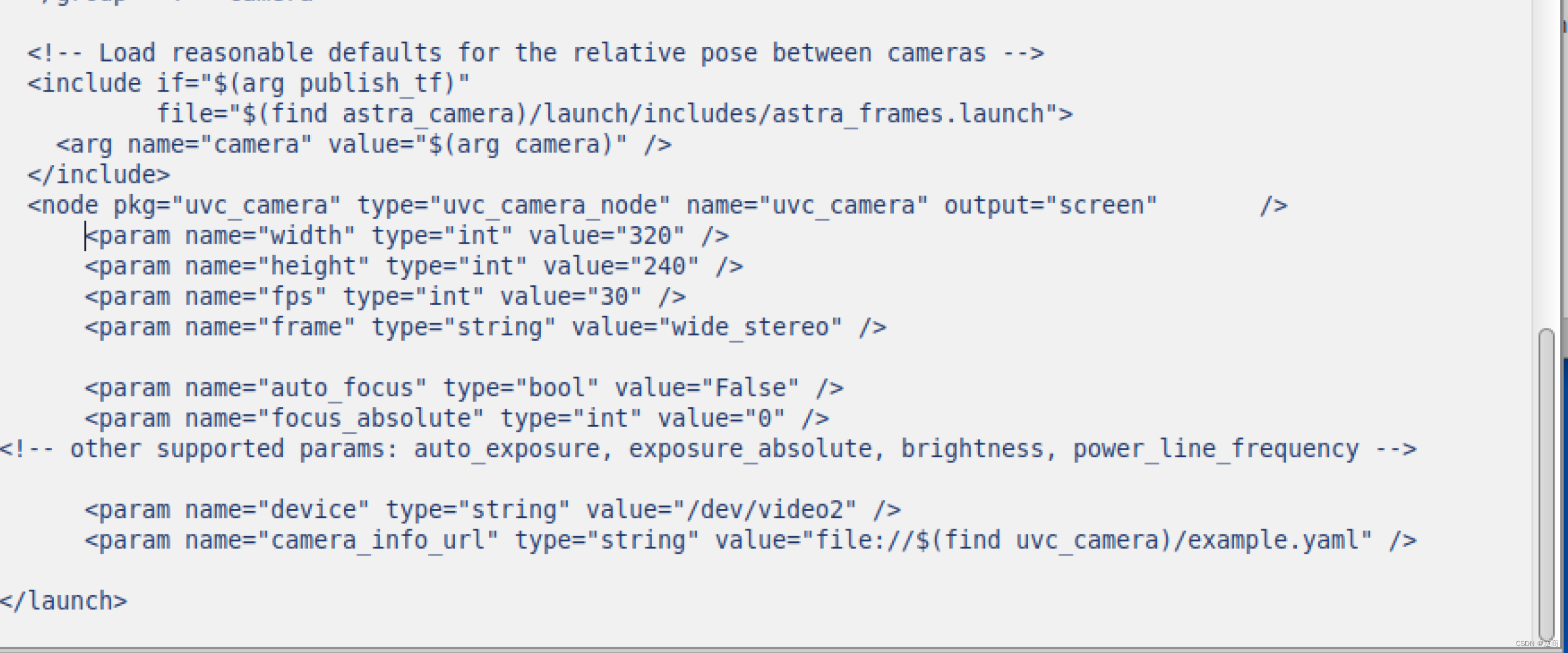
wheeltec@wheeltec:~/wheeltec_robot$ catkin_make4.修改launch
<node pkg="uvc_camera" type="uvc_camera_node" name="uvc_camera" output="screen" />
<param name="width" type="int" value="320" />
<param name="height" type="int" value="240" />
<param name="fps" type="int" value="30" />
<param name="frame" type="string" value="wide_stereo" />
<param name="auto_focus" type="bool" value="False" />
<param name="focus_absolute" type="int" value="0" />
<!-- other supported params: auto_exposure, exposure_absolute, brightness, power_line_frequency -->
<param name="device" type="string" value="/dev/video2" />
<param name="camera_info_url" type="string" value="file://$(find uvc_camera)/example.yaml" />
添加位置/home/wheeltec/wheeltec_robot/src/ros_astra_camera/launch/astra.launch
5.source
cd /home/wheeltec/wheeltec_robot
source devel/setup.bash
roslaunch astra_camera astra.launch
6,rviz
以上作废,可后续参考相关
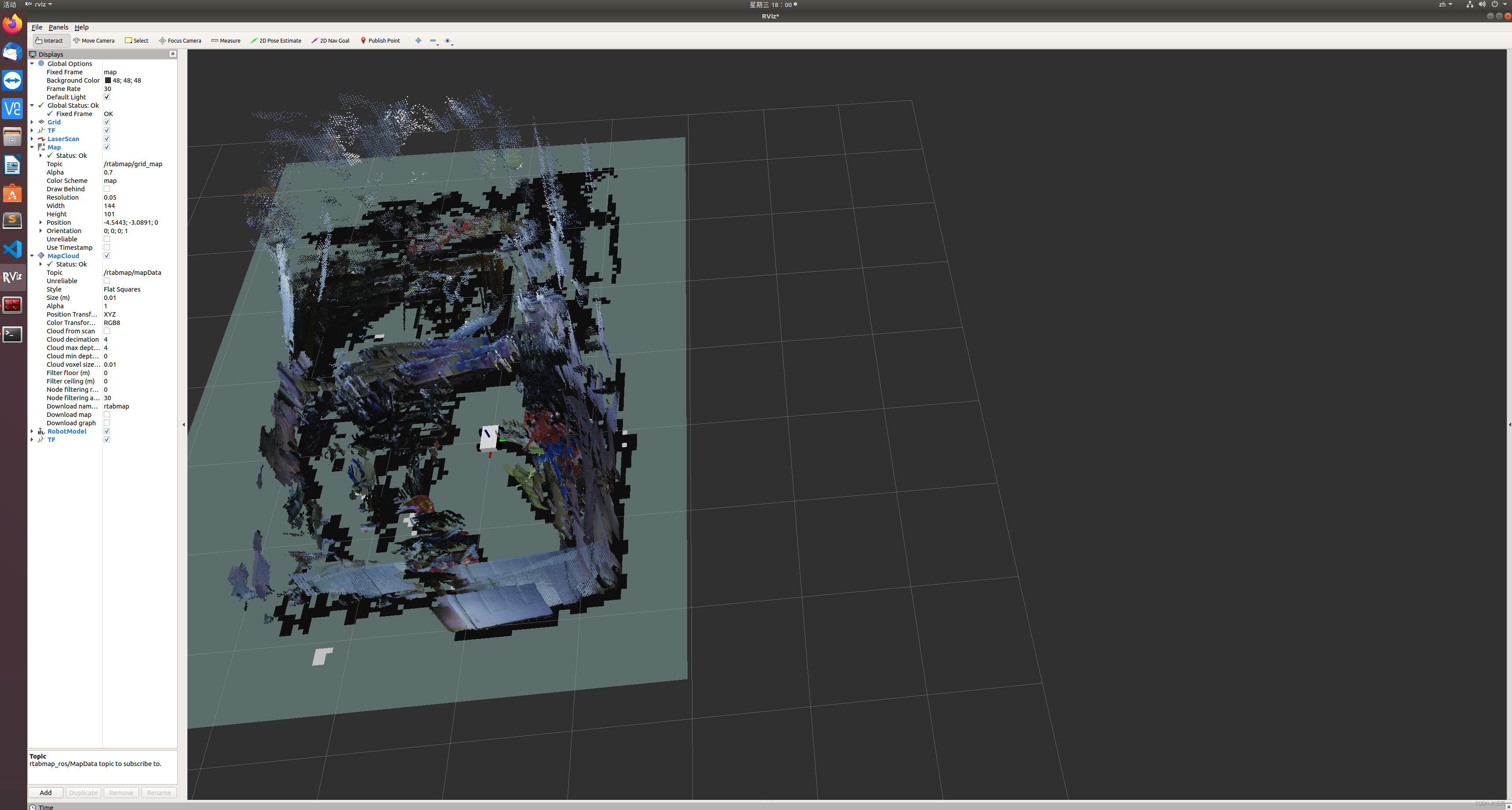
II.纯视觉建图,ubuntu点云不显示,但是RVIZ添加正常,
原因:软件版本不匹配,打开树莓派即可看见点云
Ubuntu:

raspberry:
设置UBUNTU和RASPBERRY ROS源相同,并更新,
$ sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get update && sudo apt-get upgrade
sudo apt-get upgrade
sudo apt-get install ros-melodic-rtabmap*
之后
UBUNTU

raspberry

参考安装 (74条消息) ROS medolic jetson安装_逆商的博客-CSDN博客
之后UBUNTU 运行 rviz

![[计算机图形学]动画与模拟:关键帧动画、质点弹簧系统、运动学与绑定(前瞻预习/复习回顾)](https://img-blog.csdnimg.cn/79ea2d973dfc47b59d0f43d376d1fe65.png)