ROS2概述
- 1 ROS2对比ROS1
- 2 ROS2 通信
- 3 核心概念
- 4 ros2 安装
- 5 话题、服务、动作
- 6 参数
- 参考
1 ROS2对比ROS1
- 多机器人系统:未来机器人一定不会是独立的个体,机器人和机器人之间也需要通信和协作,ROS2为多机器人系统的应用提供了标准方法和通信机制。
- 跨平台:机器人应用场景不同,使用的控制平台也会有很大差异,比如自动驾驶汽车中的算力性能肯定比AMR机器人强很多,为了让所有机器人都可以运行ROS2,ROS2可以跨平台运行于Linux、Windows、MacOS、RTOS,甚至是没有任何系统的微控制器(MCU)上,这样我们就不用纠结自己的控制器能不能用ROS了。
- 实时性:机器人运动控制和很多行为策略要求机器人具备实时性,比如机器人要可靠得在100ms内发现前方的行人,或者稳定的在1ms周期内完成运动学、动力学的解算,ROS2为类似这样的实时性需求提供了基本保障。
- 网络连接:无论在怎样的网络环境下,ROS2都可以尽量保障机器人大量数据的完整性和安全性,比如在wifi信号不好的时候数据也要尽力发送过去,在有黑客入侵风险的场景下要对数据进行加密解密。
- 产品化:,大量机器人已经走向我们的生活,未来还会越来越多,ROS2不仅可以用于机器人研发阶段,还可以直接搭载在产品中,走向消费市场,这对ROS2的稳定性、强壮性也提除了巨大挑战。
- 项目管理:机器人开发是一个复杂的系统工程,设计、开发、调试、测试、部署等全流程的项目管理工具和机制,也会在ROS2中体现,更方便我们去开发一款机器人。
- 架构大改,由主节点管理通信方式改为分布式(DDS);
- API重新设计,使用方法类似;
- 编译方式做了调整
- 通信换成DDS
- 用了新的语言特性
2 ROS2 通信
ROS2相比ROS1最大的变化,除了省略了Master之外,应该就是通信系统的变化了。ROS1中基于TCP/UDP的通信系统,频繁诟病于延迟、丢数据、无法加密等问题,ROS2中的DDS在通信层面的功能就丰富多了。
DDS其实是物联网中广泛应用的一种通信协议,类似于我们常听说的5G通信一样,DDS是一个国际标准,能够实现该标准的软件系统并不是唯一的,所以我们可以选择多个厂家提供的DDS系统,比如这里的OpenSplice、FastRTPS,还有更多厂家提供的,每一家的性能不同,适用的场景也不同。
不过这就带来一个问题,每个DDS厂家的软件接口肯定是不一样的,如果我们按照某一家的接口写完了程序,想要切换其他厂家的DDS,不是要重新写代码么?这当然不符合ROS提高软件复用率的目标。
为了解决这个问题,ROS2设计了一个ROS Middleware,简称RMW,也就是指定一个标准的接口,比如如何发数据,如何收数据,数据的各种属性如何配置,都定义好了,如果厂家想要接入ROS社区,就得按照这个标准写一个适配的接口,把自家的DDS给移植过来,这样就把问题交给了最熟悉自家DDS的厂商。对于我们这些用户来讲,某一个DDS用的不爽,只要安装另一个,然后做一个简单的配置,程序一行的都不用改,轻松更换底层的通信系统。
举一个例子,比如我们在产品开发时,可以先用开源版本的DDS满足基本需求,部署交付的产品时,再更换为商业版本更稳定的DDS,这样可以减少开发成本。
3 核心概念

4 ros2 安装
《ROS2入门21讲图文教程 | 3、ROS2安装方法》
5 话题、服务、动作
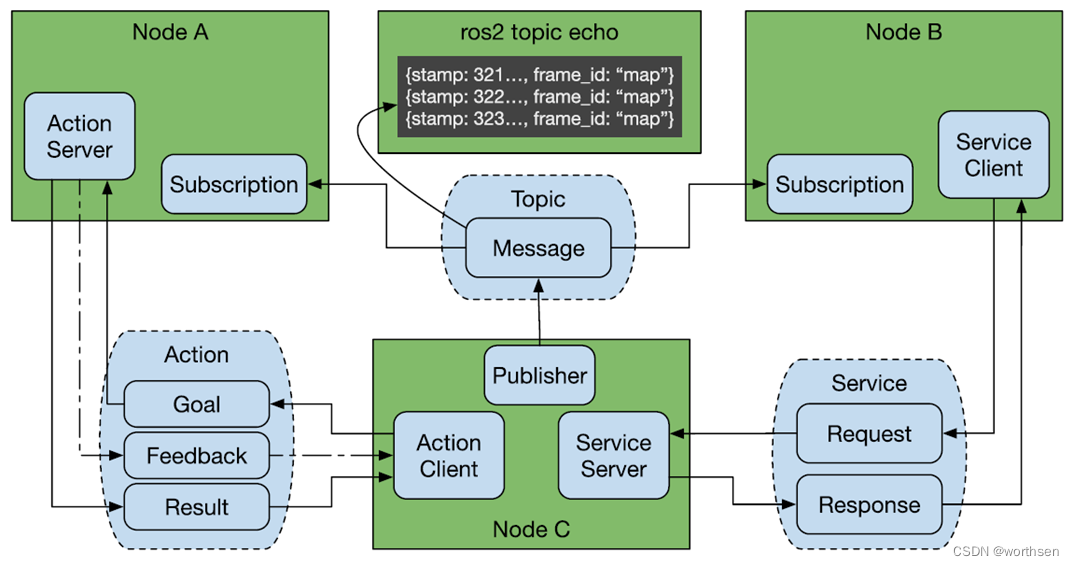

- 话题通信接口的定义使用的是.msg文件,由于是单向传输,只需要描述传输的每一帧数据是什么就行,比如在这个定义里,会传输两个32位的整型数,x、y,我们可以用来传输二维坐标的数值。
- 服务通信接口的定义使用的是.srv文件,包含请求和应答两部分定义,通过中间的“—”区分,比如之前我们学习的加法求和功能,请求数据是两个64位整型数a和b,应答是求和的结果sum。
- 动作是另外一种通信机制,用来描述机器人的一个运动过程,使用.action文件定义,比如我们让小海龟转90度,一边转一边周期反馈当前的状态,此时接口的定义分成了三个部分,分别是动作的目标,比如是开始运动,运动的结果,最终旋转的90度是否完成,还有一个周期反馈,比如每隔1s反馈一下当前转到第10度、20度还是30度了,让我们知道运动的进度。
6 参数
名称和数值组成键值对,形成全局字典。
ROS1中存在Master中,各节点共享,ROS2中类似git机制吧,每个节点同步其他节点共享的参数。
参考
1、ROS2入门21讲图文教程