随着新能源汽车和自动驾驶技术的快速发展,汽车电子电气架构的发展已成为汽车行业推陈出新的主要动力:车内电控系统变得越来越复杂、软件迭代周期越来越短,汽车电子软件开发和测试的质量与效率要求也越来越高。汽车电控系统的设计开发已然成为复杂的系统工程。
近年来,“基于模型的电子架构设计方式”逐步被业内所接受与推崇,已成为保证整车研发成功的必要措施之一。2012年,欧洲发起智能系统工程(Smart Systems Engineering)项目,来自ANSYS、西门子、达索、宝马、博世、大众、ETAS等近30家汽车整车和部件研发单位以及工业软件企业共同合作,探索面向应用的概念,以克服常见的系统工程挑战。2022年,该项目已踏入第五阶段,项目核心主题则主要侧重于仿真质量与系统工程、敏捷方法的交互,以及传统V字形模型的拓展阶段。
作为这一系列设计方法的基础架构,基于模型的设计(MBD,Model-Based Design)是已在汽车、航空和军工等行业得到明确实践的一套理念和方法。基于模型的系统工程(MBSE,Model Based System Engineer)是MBD的形式化应用,在典型的MBSE开发流程中,产品的研发主要涉及控制系统(主要包含控制算法和代码)和被控对象两大要素,典型研发流程如下图所示。
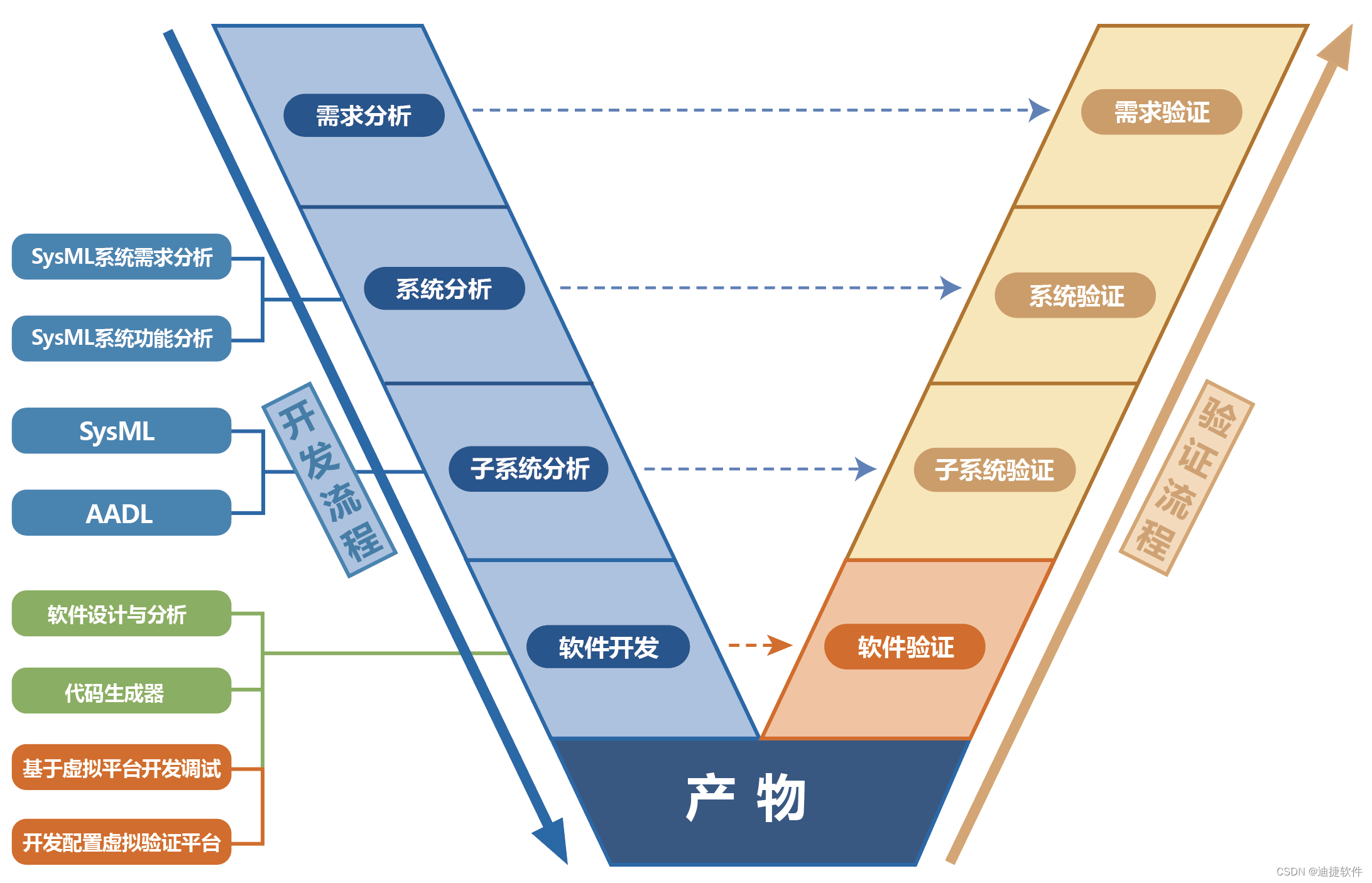
▲图1 典型MBSE研发流程示意图
从开发工具链实际参与汽车控制系统MBSE研发过程的广度和深度出发,目前流行的汽车控制应用软件开发工具链的上游开发工具有:
- 建模仿真工具(Simulink/Stateflow)
- 模型优化与代码生成工具(Targetlink+ASCET-DEVELOPER)
- 测试工具(BTC Embedded Tester Base)
- 系统虚拟集成仿真工具(dSPACE VEOS)
- 系统集成测试工具(ECU-test)
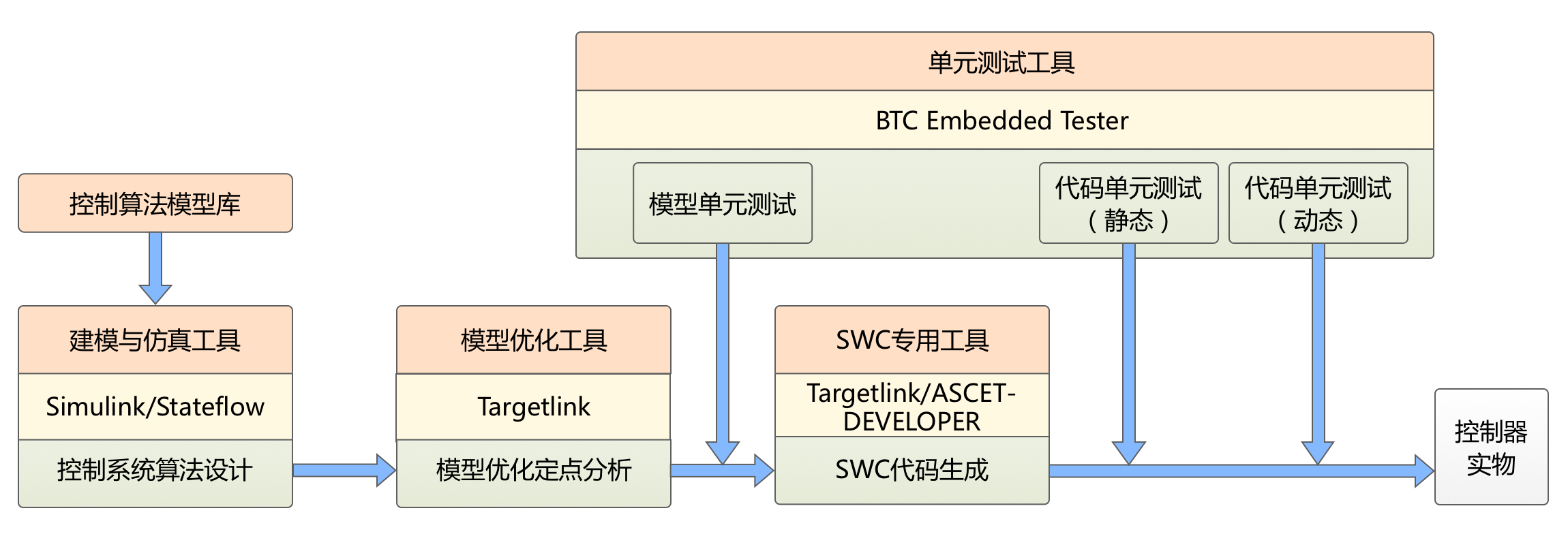
▲图2 基于MBD的控制系统建模与仿真软件工具集
上述工具可作为开发汽车常用的控制算法模型库的研发基础,同时支持定点计算和SWC代码生成。下面将以构建电动助力转向(EPS,Electric Power Steering)系统为例,详述工具集的应用。
EPS是电子电气系统的组成部分(如图3所示),该系统一般包括电机、减速机构、扭矩传感器和电子控制单元(ECU,ElecmalControlUnit),其电子控制单元采集并解算出方向盘上作用的扭矩,经过一定的助力算法,控制电机输出相应的力矩,通过减速机构对该力矩进行放大后,传递到转向器,辅助驾驶员转动方向盘。
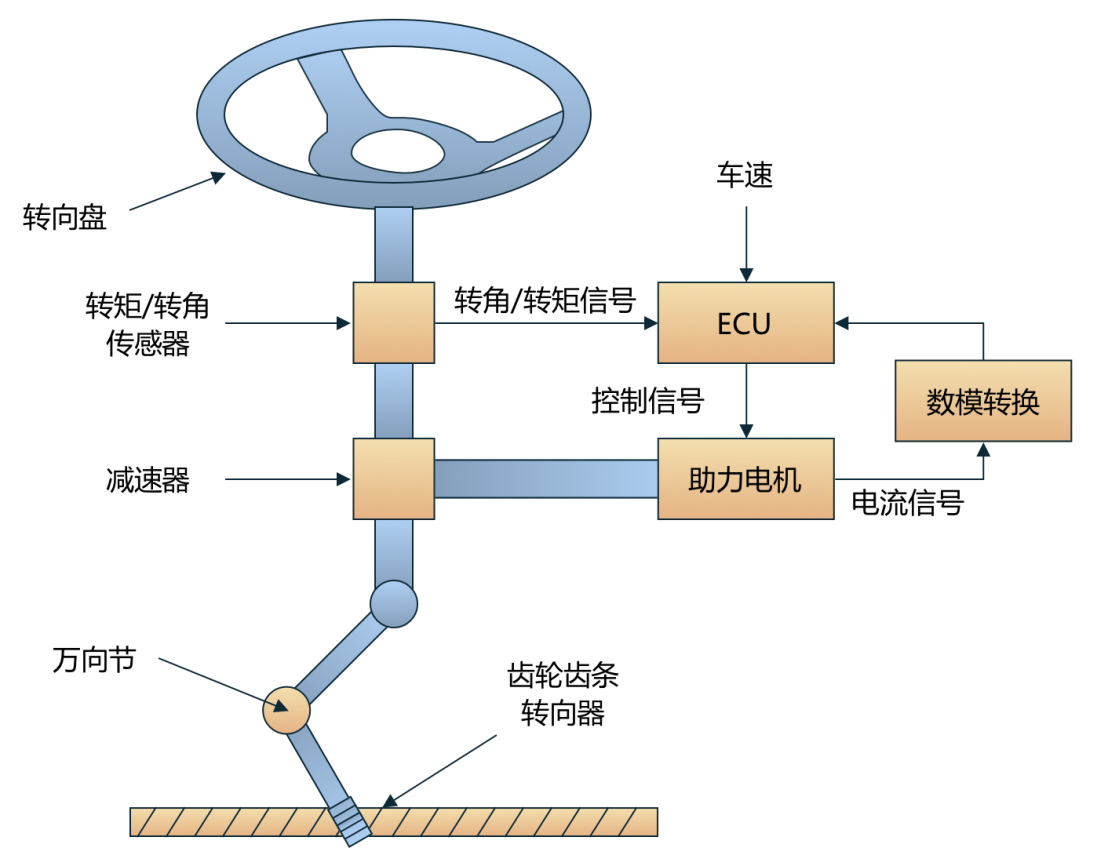
▲图3 电动助力转向(EPS)系统示意图
搭建过程中,可利用建模与仿真工具的基础运算逻辑模块和有限状态机模块可完成EPS电控单元模型的搭建,进而进行控制算法仿真(浮点数);利用模型优化工具对模型进行定点影响分析并优化模型,开展定点位真仿真;还可利用单元测试工具进行模型的动态测试,验证模型功能性能。
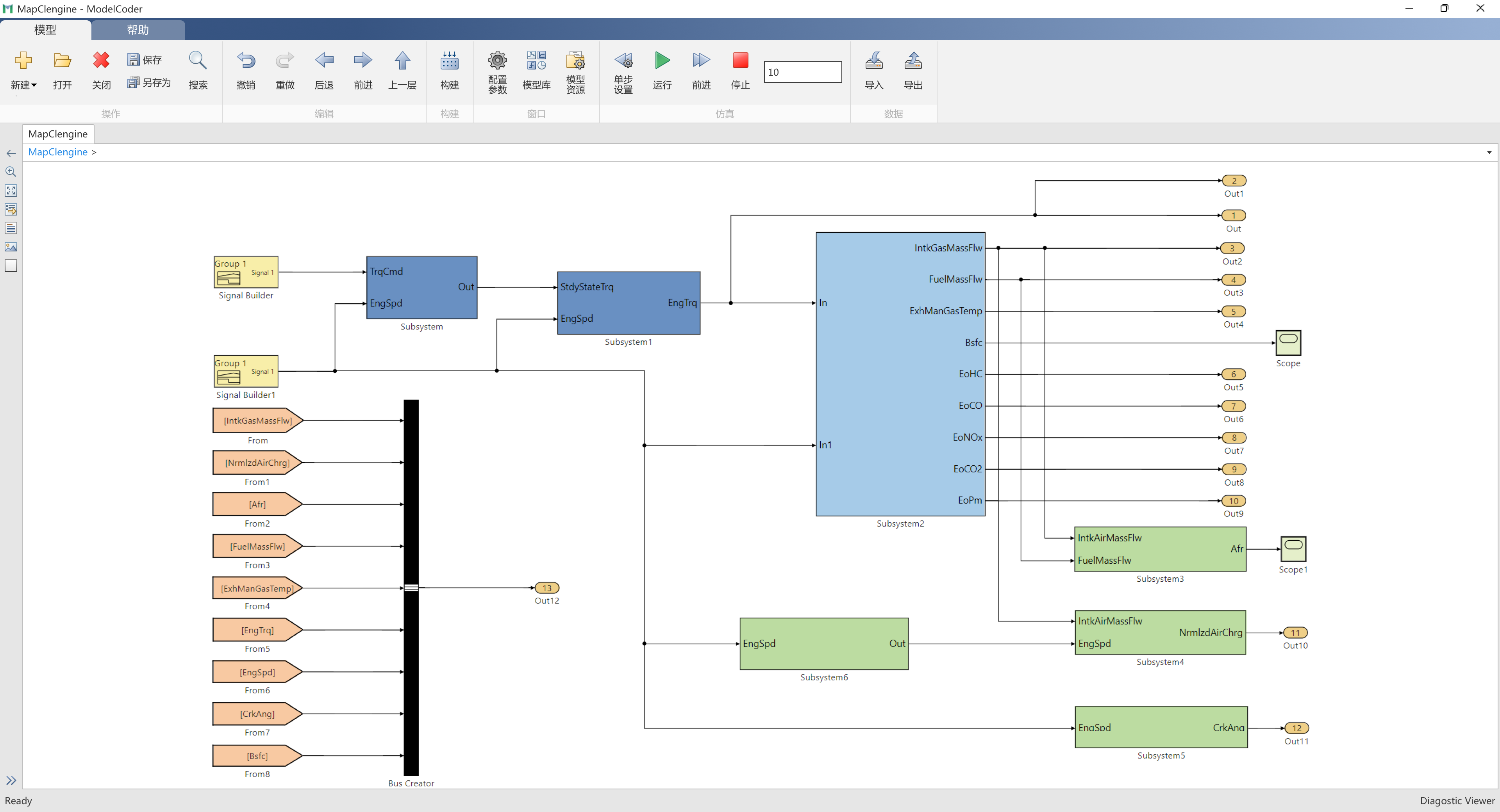
建模仿真与代码生成软件ModelCoder支持基于模型的嵌入式系统设计、仿真和可信代码自动生成,提供了图形编辑器、模块库以及对应的求解器,可对算法或控制逻辑进行可视化建模。其可信代码生成器可通过形式化验证技术将用户模型翻译为可信代码,进而不加修改地应用于多种嵌入式系统。
ModelCoder具有结构明了、流程清晰、仿真精细、贴近实际、效率高、灵活、适应面广泛等优点,可被应用于如控制系统和数字信号处理(DSP)等复杂模型的设计和仿真。