目录
一、根据目标函数约束条件类型分类
1、线性规划
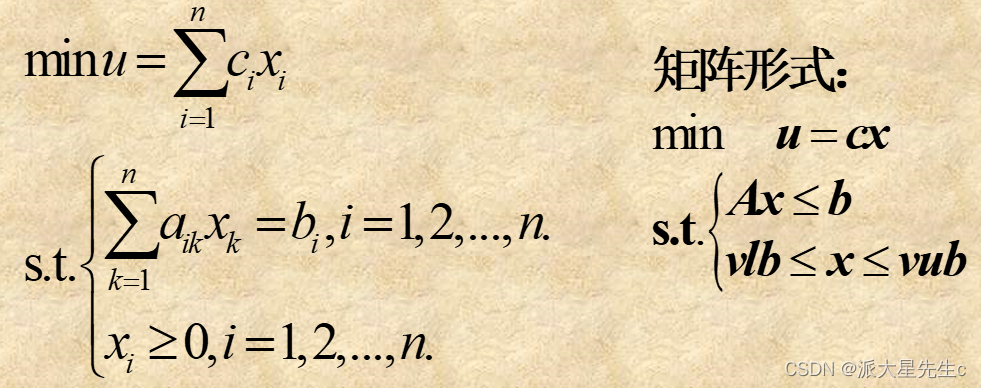
①线性规划模型的一般形式
②用MATLAB优化工具箱解线性规划
③模型分析
2、非线性规划
①非线性规划的基本概念
②非线性规划的基本解法
③二次规划
④一般非线性规划
二、控制变量类型分类
1、整数规划
①matlab编程
②模型求解
2、混合整数规划(MIP)
①matlab语法
②模型案例
3、0-1规划
①应用范围
②案例分析
③matlab代码如下:
三、其他分类方法
1、单目标规划与多目标规划
①理想点法
②线性加权和法
③最大最小值法
④目标规划法
⑤模糊数学求解方法
2、动态规划与静态规划
①动态规划思路
②最短路径规划
3、随机规划与确定规划
①随即规划
②案例分析
一、根据目标函数约束条件类型分类
1、线性规划
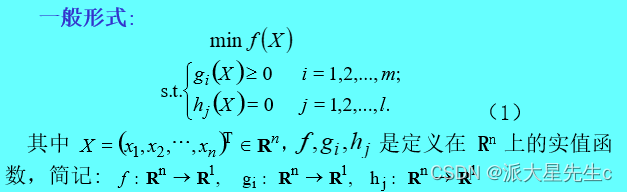
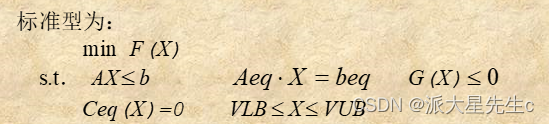
①线性规划模型的一般形式
目标函数和所有的约束条件都是设计变量的线性函数。
 ②用MATLAB优化工具箱解线性规划
②用MATLAB优化工具箱解线性规划


③模型分析 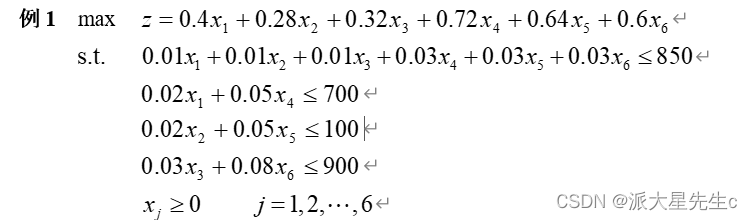
c=[-0.4 -0.28 -0.32 -0.72 -0.64 -0.6];
A=[0.01 0.01 0.01 0.03 0.03 0.03;0.02 0 0 0.05 0 0;0 0.02 0 0 0.05 0;0 0 0.03 0 0 0.08];
b=[850;700;100;900];
Aeq=[];
beq=[];
vlb=[0;0;0;0;0;0];
vub=[];
[x,fval]=linprog(c,A,b,Aeq,beq,vlb,vub) 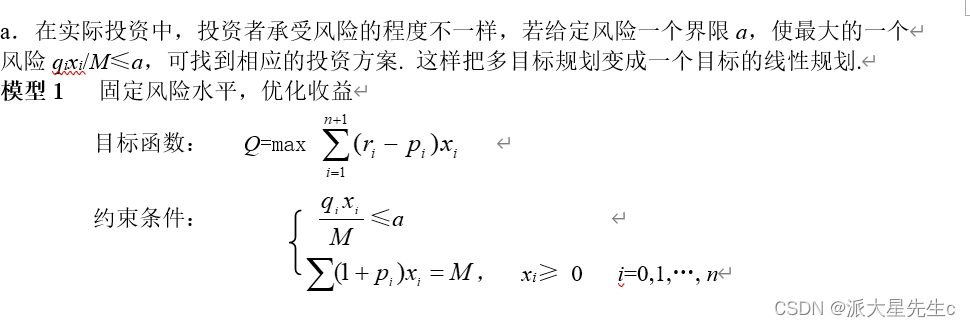
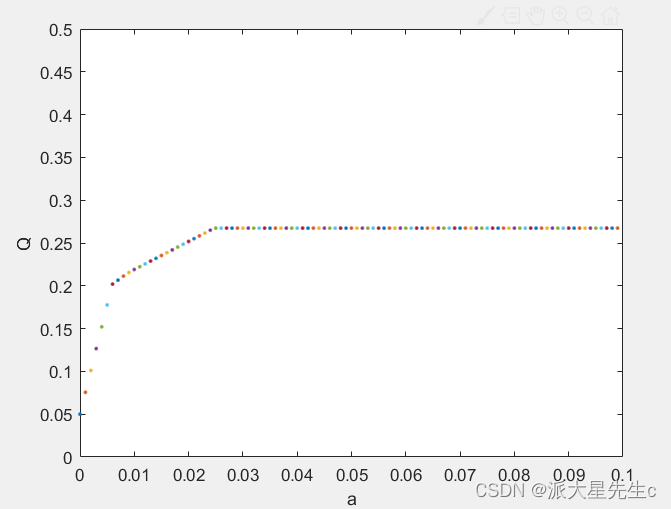
 由于a是任意给定的风险度,到底怎样给定没有一个准则,不同的投资者有不同的风险度.我们从a=0开始,以步长△a=0.001进行循环搜索,编制程序如下:
由于a是任意给定的风险度,到底怎样给定没有一个准则,不同的投资者有不同的风险度.我们从a=0开始,以步长△a=0.001进行循环搜索,编制程序如下:
a=0;
while(1.1-a)>1
c=[-0.05 -0.27 -0.19 -0.185 -0.185];
Aeq=[1 1.01 1.02 1.045 1.065];
beq=[1];
A=[0 0.025 0 0 0;0 0 0.015 0 0;0 0 0 0.055 0;0 0 0 0 0.026];
b=[a;a;a;a];
vlb=[0,0,0,0,0];
vub=[];
[x,val]=linprog(c,A,b,Aeq,beq,vlb,vub);
a
x=x'
Q=-val
plot(a,Q,'.')
axis([0 0.1 0 0.5])
hold on
a=a+0.001;
end
xlabel('a'),ylabel('Q')
a = 0.0030 x = 0.4949 0.1200 0.2000 0.0545 0.1154 Q = 0.1266
a = 0.0060 x = 0 0.2400 0.4000 0.1091 0.2212 Q = 0.2019
a = 0.0080 x = 0.0000 0.3200 0.5333 0.1271 0.0000 Q = 0.2112
a = 0.0100 x = 0 0.4000 0.5843 0 0 Q =0.2190
a = 0.0200 x = 0 0.8000 0.1882 0 0 Q =0.2518
a = 0.0400 x = 0.0000 0.9901 0.0000 0 0 Q =0.2673
2、非线性规划
①非线性规划的基本概念
定义 如果目标函数或约束条件中至少有一个是非线性函数,则最优化问题就叫做非线性规划问题
②非线性规划的基本解法
罚函数法:SUTM外点法、SUTM内点法(障碍罚函数法)
近似规划法
③二次规划

用MATLAB软件求解,其输入格式如下:
1.x=quadprog(H,C,A,b);
2.x=quadprog(H,C,A,b,Aeq,beq);
3.x=quadprog(H,C,A,b,Aeq,beq,VLB,VUB);
4.x=quadprog(H,C,A,b, Aeq,beq ,VLB,VUB,X0);
5.x=quadprog(H,C,A,b,Aeq,beq,VLB,VUB,X0,options);
6.[x,fval]=quaprog(…);
7.[x,fval,exitflag]=quaprog(…);
8.[x,fval,exitflag,output]=quaprog(…);

写成标准式:

H=[1 -1; -1 2];
c=[-2 ;-6];
A=[1 1; -1 2];
b=[2;2];
Aeq=[];
beq=[];
VLB=[0;0];VUB=[];
[x,z]=quadprog(H,c,A,b,Aeq,beq,VLB,VUB)
运算结果为:
x = 0.6667 1.3333
z = -8.2222
④一般非线性规划
1、首先建立M文件fun.m,用来定义目标函数F(X):
2、若约束条件中有非线性约束:
G(X)或Ceq(X)=0,则建立M文件nonlcon.m定义函数G(X)与Ceq(X):
function [G,Ceq]=nonlcon(X)
G=…
Ceq=…
3、 建立主程序.求解非线性规划的函数是fmincon,命令的基本格式如下:
(1) x=fmincon(‘fun’,X0,A,b)
(2) x=fmincon(‘fun’,X0,A,b,Aeq,beq)
(3) x=fmincon(‘fun’,X0,A,b, Aeq,beq,VLB,VUB)
(4) x=fmincon(‘fun’,X0,A,b,Aeq,beq,VLB,VUB,’nonlcon’)
(5)x=fmincon(‘fun’,X0,A,b,Aeq,beq,VLB,VUB,’nonlcon’,options)

(6) [x,fval]= fmincon(…)
(7) [x,fval,exitflag]= fmincon(…)
(8)[x,fval,exitflag,output]= fmincon(…)
4、例题解释

写成标准式:

先建立M-文件 fun3.m:
function f=fun3(x);
f=-x(1)-2*x(2)+(1/2)*x(1)^2+(1/2)*x(2)^2再建立主程序youh2.m:
x0=[1;1];
A=[2 3 ;1 4]; b=[6;5];
Aeq=[];beq=[];
VLB=[0;0]; VUB=[];
[x,fval]=fmincon('fun3',x0,A,b,Aeq,beq,VLB,VUB)运行结果为:
x = 0.7647 1.0588
fval = -2.0294
二、控制变量类型分类
1、整数规划
①matlab编程
利用Matlab的线性规划指令:
[x,fval]=linprog(f,A,b,Aeq,beq,lb,ub)
编写计算整数规划函数,输入与输出与上述指令相同
分枝定界法(递归实现)
function [x,fval,status] = intprog(f,A,B,I,Aeq,Beq,lb,ub,e)
%整数规划求解函数 intprog()
% 其中 f为目标函数向量
% A和B为不等式约束 Aeq与Beq为等式约束
% I为整数约束
% lb与ub分别为变量下界与上界
% x为最优解,fval为最优值
%例子:
% maximize 20 x1 + 10 x2
% S.T.
% 5 x1 + 4 x2 <=24
% 2 x1 + 5 x2 <=13
% x1, x2 >=0
% x1, x2是整数
% f=[-20, -10];
% A=[ 5 4; 2 5];
% B=[24; 13];
% lb=[0 0];
% ub=[inf inf];
% I=[1,2];
% e=0.000001;
% [x v s]= IP(f,A,B,I,[],[],lb,ub,,e)
% x = 4 1 v = -90.0000 s = 1
% 控制输入参数
if nargin < 9, e = 0.00001;
if nargin < 8, ub = [];
if nargin < 7, lb = [];
if nargin < 6, Beq = [];
if nargin < 5, Aeq = [];
if nargin < 4, I = [1:length(f)];
end, end, end, end, end, end
%求解整数规划对应的线性规划,判断是否有解
options = optimset('display','off');
[x0,fval0,exitflag] = linprog(f,A,B,Aeq,Beq,lb,ub,[],options);
if exitflag < 0
disp('没有合适整数解');
x = x0;
fval = fval0;
status = exitflag;
return;
else
%采用分支定界法求解
bound = inf;
[x,fval,status] = branchbound(f,A,B,I,x0,fval0,bound,Aeq,Beq,lb,ub,e);
end
子函数
function [newx,newfval,status,newbound] = branchbound(f,A,B,I,x,fval,bound,Aeq,Beq,lb,ub,e)
% 分支定界法求解整数规划
% f,A,B,Aeq,Beq,lb,ub与线性规划相同
% I为整数限制变量的向量
% x为初始解,fval为初始值
options = optimset('display','off');
[x0,fval0,status0]=linprog(f,A,B,Aeq,Beq,lb,ub,[],options);
%递归中的最终退出条件
%无解或者解比现有上界大则返回原解
if status0 <= 0 || fval0 >= bound
newx = x;
newfval = fval;
newbound = bound;
status = status0;
return;
end
%是否为整数解,如果是整数解则返回
intindex = find(abs(x0(I) - round(x0(I))) > e);
if isempty(intindex)
newx(I) = round(x0(I));
newfval = fval0;
newbound = fval0;
status = 1;
return;
end
%当有非整可行解时,则进行分支求解
%此时必定会有整数解或空解
%找到第一个不满足整数要求的变量
n = I(intindex(1));
addA = zeros(1,length(f));
addA(n) = 1;
%构造第一个分支 x<=floor(x(n))
A = [A;addA];
B = [B,floor(x(n))];
[x1,fval1,status1,bound1] = branchbound(f,A,B,I,x0,fval0,bound,Aeq,Beq,lb,ub,e);
A(end,:) = [];
B(:,end) = [];
%解得第一个分支,若为更优解则替换,若不是则保持原状
status = status1;
if status1 > 0 && bound1 < bound
newx = x1;
newfval = fval1;
bound = fval1;
newbound = bound1;
else
newx = x0;
newfval = fval0;
newbound = bound;
end
%构造第二分支
A = [A;-addA];
B = [B,-ceil(x(n))];
[x2,fval2,status2,bound2] = branchbound(f,A,B,I,x0,fval0,bound,Aeq,Beq,lb,ub,e);
A(end,:) = [];
B(:,end) = [];
%解得第二分支,并与第一分支做比较,如果更优则替换
if status2 > 0 && bound2 < bound
status = status2;
newx = x2;
newfval = fval2;
newbound = bound2;
end②模型求解
利用上述指令求解下列问题:
汽车厂生产三种类型的汽车,已知各类型每辆车对钢材、劳动时间的需求,利润及工厂每月的现有量
|
| 小型 | 中型 | 大型 | 现有量 |
| 钢材(吨) | 1 | 2 | 5 | 1000 |
| 劳动时间(小时) | 250 | 125 | 150 | 120000 |
| 利润(万元) | 3 | 5 | 12 |
|
1、若每月生产的汽车必须为整车,试制订月生产计划,使工厂的利润最大?
f = [-3 -5 -12];
A = [1 2 5;250 125 150];
B = [1000 120000];
I = [1:length(f)];
lb = [0 0 0];
[x,fval,status] = intprog(f,A,B,I,[],[],lb)答案为 x =307 344 1 fval = -2653 status =1
2、如果生产某一类型汽车,则至少要生产50辆,那么最优的生产计划应作何改变?
lb = [50 50 50]
答案为 x =350 200 50 fval =-2.6500e+003 status =1
2、混合整数规划(MIP)
①matlab语法
x = intlinprog(f, intcon,A,b)
x = intlinprog(f , intcon,A,b,Aeq, beq)
X=intlinprog(f , intcon, A, b, Aeq, beq,1b,ub)
x = intlinprog(f, intcon,A, b,Aeq, beq, lb, ub,x0)
x = intlinprog(f, intcon, A, b,Aeq, beq,lb, ub, x0, options)
x = intlinprog(problem)
[x, fval, exitflag,output] = intlinprog(__)
f、x、intcon、lb、beq、Ib和ub是向量,A和Aeq是矩阵
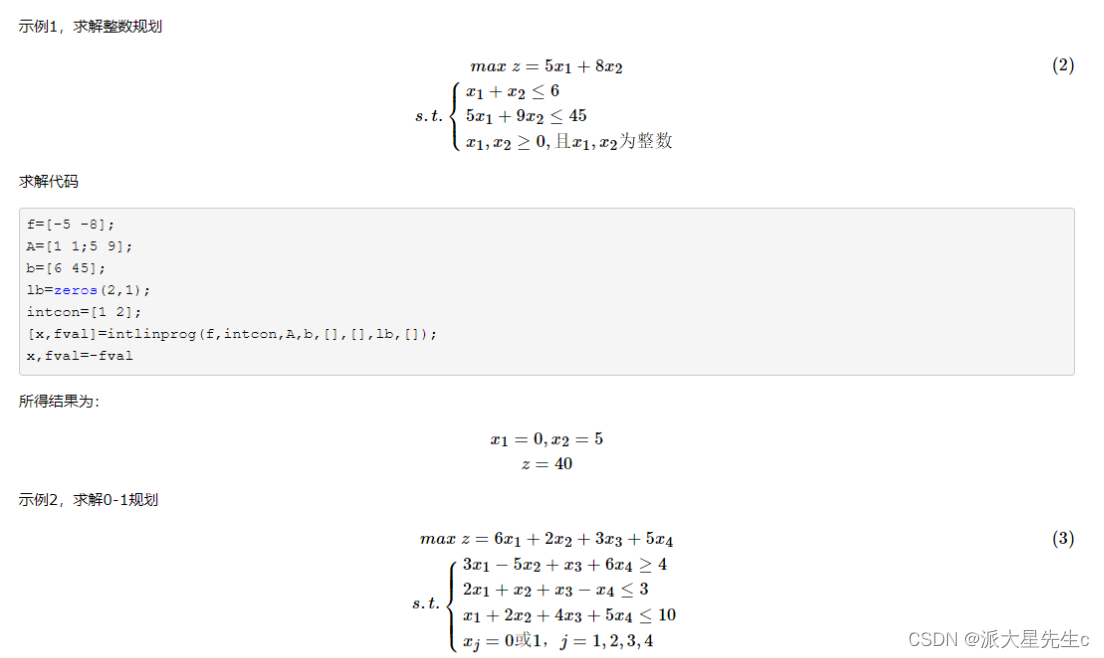
②模型案例
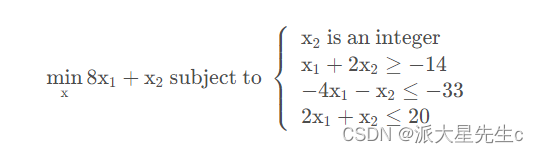
f = [8;1];%确定目标函数系数
intcon = 2;%理解为两个受x受到整数限制
A = [-1,-2;
-4,-1;
2,1];%构造不不等式左边系数矩阵
b = [14;-33;20];%构造不等式右边矩阵
x = intlinprog(f,intcon,A,b)

%案例二
clear all
clc
% 编写目标函数向量和由整数变量组成的向量。
f = [-3;-2;-1];
intcon = 3;
% 编写线性不等式约束。
A = [1,1,1];
b = 7;
% 编写线性等式约束。
Aeq = [4,2,1];
beq = 12;
% 编写边界约束。
lb = zeros(3,1);%等效于lb=[0;0;0]
ub = [Inf;Inf;1]; %强制x(3)为一个固定1
%调用intlinprog
x = intlinprog(f,intcon,A,b,Aeq,beq,lb,ub)
当x2 = 5 , x3 = 1 , x1 = 0 最值为−12
3、0-1规划
①应用范围
0-1线性规划模型一般被用于指派问题上面
②案例分析
[x,f]= L01p_e(c,A,b,N)用枚举法求解下列
0-1线性规划问题
min f=c'*x, s.t. A*x<=b,x的分量全为整数0或1,
其中N表示约束条件 Ax ≤ b中的前N个是等式,N= 0时可以省略。
返回结果x是最优解,f是最优解处的函数值。
例 max f=3x1+5x2+2x3+4x4+2x5+3x6
s.t. 8x1+13x2+6x3+9x4+5x5+7x6<=24, x1,…,x6均为0或1
求解
c=-[3,5,2,4,2,3];a=[8,13,6,9,5,7];b=24;
x=L01p_e(c,a,b)
L01p_e(c,a,b)
③matlab代码如下:
function [x,f]=L01p_e(c,A,b,N)
if nargin<4,N=0;end
c=c(:);b=b(:);
[m,n]=size(A);x=[];f=abs(c')*ones(n,1);i=1;
while i<=2^n
B=de2bi(i-1,n)';
t=A*B-b;t11=find(t(1:N,:)~=0);
t12=find(t(N+1:m,:)>0);t1=[t11;t12];
if isempty(t1)
f=min([f,c'*B]);
if c'*B==f,x=B;end
end
i=i+1;
end
0-1线性规划和整数规划的示例
f=[-6,-2,-3,-5];
A=[-3,5,-1,-6;1,1,1,-1;1,2,4,5;];
b=[-4,3,10];
intcon=[1,2,3,4];
lb=zeros(4,1);
ub=ones(4,1);
[x,y]=intlinprog(f,intcon,A,b,[],[],lb,ub);
x,y=-y
plot(x,'--ok');结果为:

三、其他分类方法

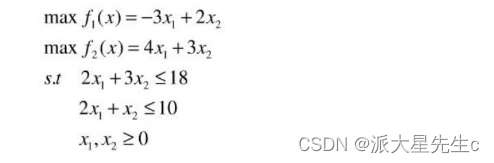
1、单目标规划与多目标规划
①理想点法


②线性加权和法

③最大最小值法

④目标规划法

⑤模糊数学求解方法

2、动态规划与静态规划
①动态规划思路
1、找到状态和选择,确定当前状态和转换
2、明确dp数组/或函数的定义,即dp数组保存了啥信息(dp数组一般是一维或二维)
3、寻找状态之间的关系,当前状态如何根据上一状态和一些已知信息得到(状态转换方程)
②最短路径规划
import matplotlib.pyplot as plt
import pylab as pl
import connmysql
import pandas as pd
sql2 = "SELECT id, distance,duration FROM trafic"
checklist = connmysql.getdata(sql2)
ids=[]
for i in range(0,len(checklist)):
ids.append(checklist[i][0])
time_dataframe = pd.DataFrame(columns=['distance','duration'], index=ids)
# print(time_dataframe)
for i in range(0,len(checklist)):
id=checklist[i][0]
time_dataframe.at[ids[i],'distance'] = float(checklist[i][1])#distance
time_dataframe.at[ids[i], 'duration'] = float(checklist[i][2] ) # distance
# id='100001-100002'
# print(time_dataframe.at[id,'distance'])
# print(time_dataframe.at['100001-100002','duration'])
# list=['100002','100003','100004','100005','100006']
#基于动态规划求得最短路径,计算量会比较小,速度较快
list = ['100002', '100003', '100004', '100005', '100006']
# 基于动态规划求得最短路径,计算量会比较小,速度较快
routelist=[]
route_distance=[]
for j in range(0,len(list)-1):
print('mm',j)
print('he1', routelist)
print('he2', route_distance)
ids = []
distances, routes = {}, {}
for i in range(0, len(list)):
if len(routelist)==0:#当里面还没有目标在时
id = list[0] + '-'+list[i]
if list[i]!=list[0]:
ids.append(id)
else:
if list[i] not in routelist :#计算过的点不再重复计算
id = routelist[j]+ '-'+list[i]
ids.append(id)
print('he3',ids)
for k in range(0, len(ids)):
distances[ids[k]] = time_dataframe.at[ids[k], 'distance']
print('he4',distances)
route1 = sorted(distances.items(), key=lambda item: item[1]) # 将最小距离取出来
route_distance.append(route1[0])
# routes[route1[0][0]] = route1[0][1] # key:100002-100006,values: 3929.0,,保存离最后一个点的最优路线
print('he5',route1)
a=route1[0][0].split('-')
if a[0] not in routelist:
routelist.append(a[0])
if a[1] not in routelist:
routelist.append(a[1])
print('he6', routelist)
print('he',routelist)
3、随机规划与确定规划
①随即规划
运用随机动态规划的分析方法,求解随机动态规划模型的最优解是一种比较常见的数学建模问题。例如,在实际应用中,经常会遇到某些多阶段决策过程中出现随机因素的情况,而动态规划的方法也可以处理这种随机性问题。
②案例分析
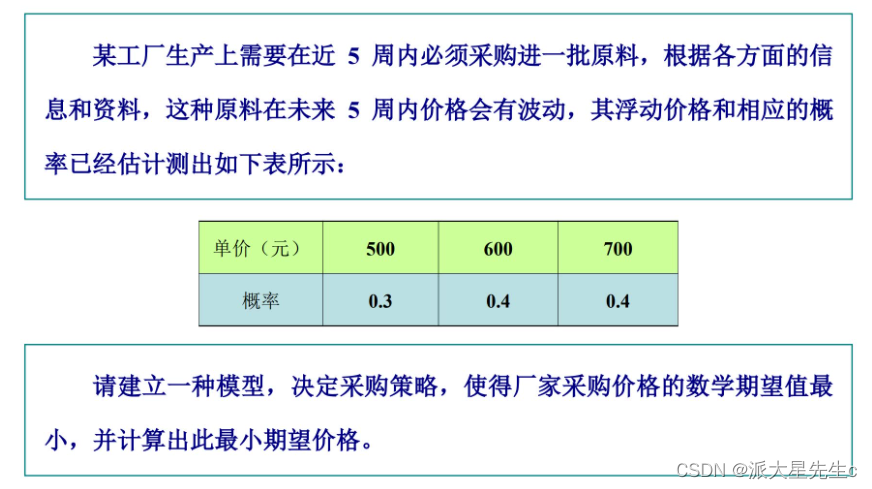
分析并假设
此问题中价格是一个随机变量,是按照某种已知的概率分布规律取值的。可以将采购期限内的5周看做5个阶段(即需要每周做一次决策,自然也可以每天做一次决策而将之更加细致地分为35个阶段,则问题便成了在每个阶段进行决策是否购进原料,以期使原料的采购价格的期望值达到最小。
在实际应用中,经常会遇到某些多阶段决策过程中出现随机因素的情况。用动态规划的方法也可以处理这种随机性问题。不过此时状态转移不能完全确定,而是按照某种已知的概率分布取值,具有这种性质的多阶段决策过程就称之为随机性的决策过程,此时运用的动态规划也就相应的被称为随机动态规划。

模型的建立和求解



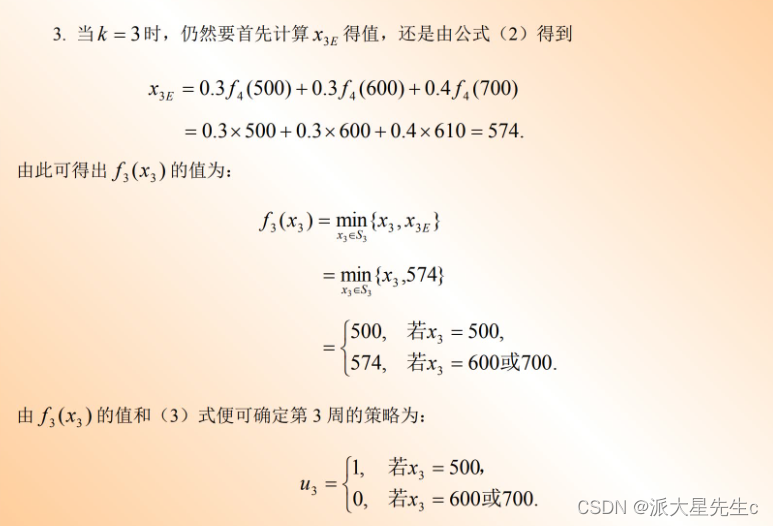


结论与分析
由以上逆推计算得结果可知,最优的采购策略序列为{,,,,}u1u2u3u4u5。根据u1,u2,3u的表达式可知,在第1、2、3周时,若价格为500时,就应采购;而在价格为600或者700时则应采取等待观望的态度。
由u4的表达式得,在第4周,若价格为500或者600时就应该采购,而在价格为700时则等待观望。
若在前4周都采取了等待观望策略,则在第5周,无论什么价格都必须采购(u5=1)。