三维空间边界点排序+机器人轨迹引导
- 一、前言
- 二、思路一:利用重建思路
- 三、思路二:利用PCL边界提取方法+三维空间点排序
- 四、后续
一、前言
| 最近做了点云边界提取、并实时发送至机器人进行引导的研究,主要遇到了两个问题: 1)点云轨迹如何提取; 2)提取好的轨迹如何按照一定的顺序发送至机器人 |
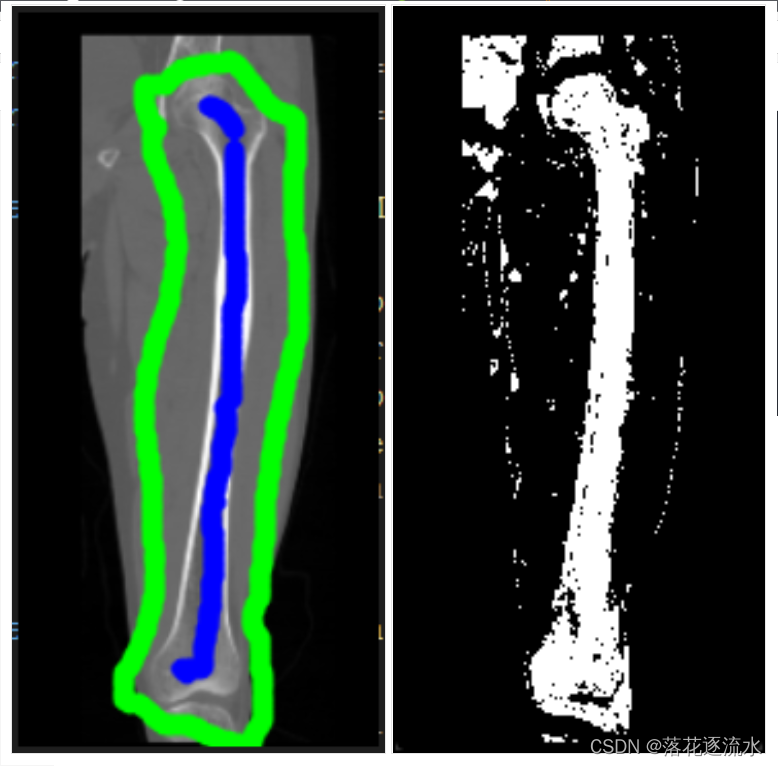
下面以随机一片点云为例,如图所示,我们需要做出如下操作:
1)准确提取边界
2)空间点排序,并按照顺时针或逆时针发送至机器人
二、思路一:利用重建思路
1、原理
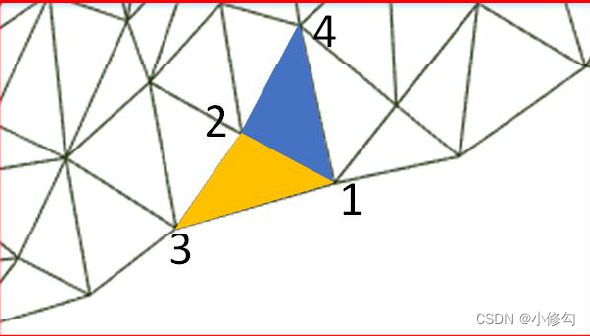
| 针对上述点云,进行三角重建;重建后每两个点形成边,依据半边网格结构,边界上的点形成半边只被共用一次,而内部点形成的边被共用两次。如下所示:边界(1、3)只有一次,边界(1、4)、边界(1、2)被用2次。只要提取出使用一次的顶点信息,即可提取出边界。 |
2、实现步骤
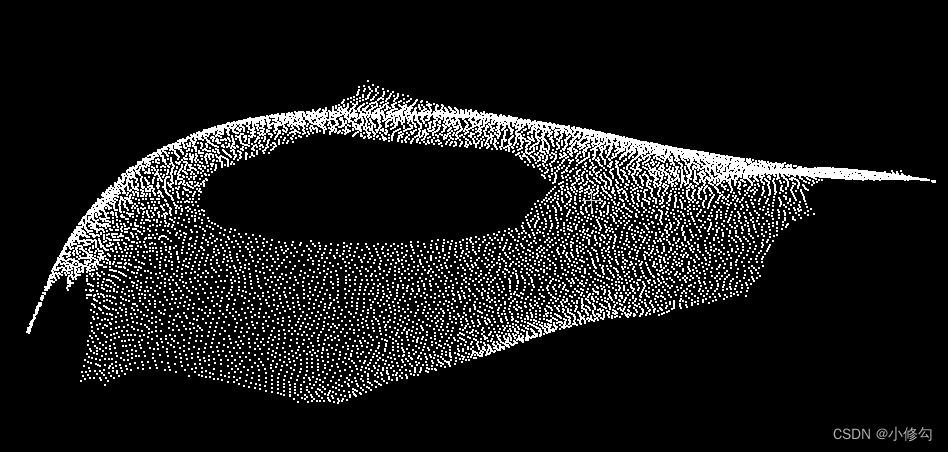
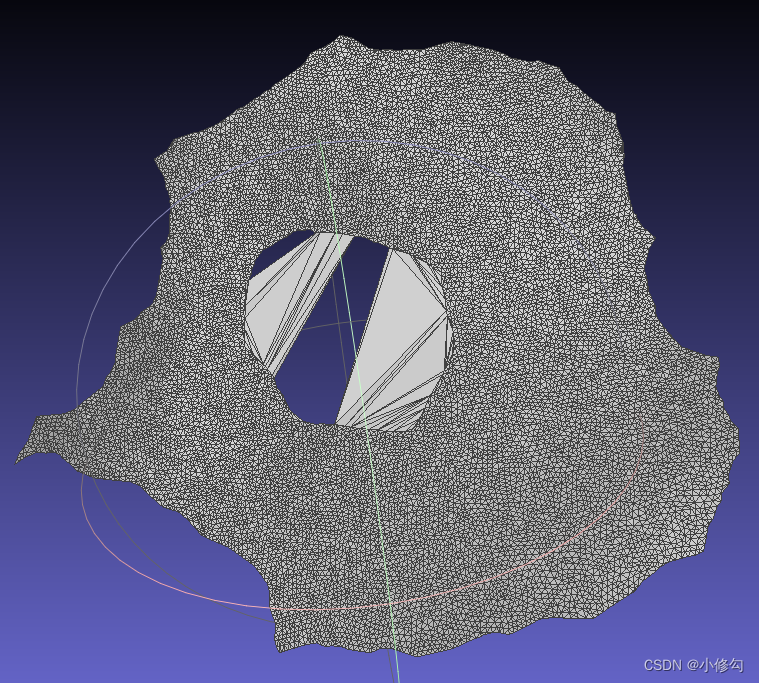
1)重建效果:
如图所示,虽然进行了三角重建,但是重建算法依旧重建错误,误把边界点当成内部点,此时需要进行重建优化。
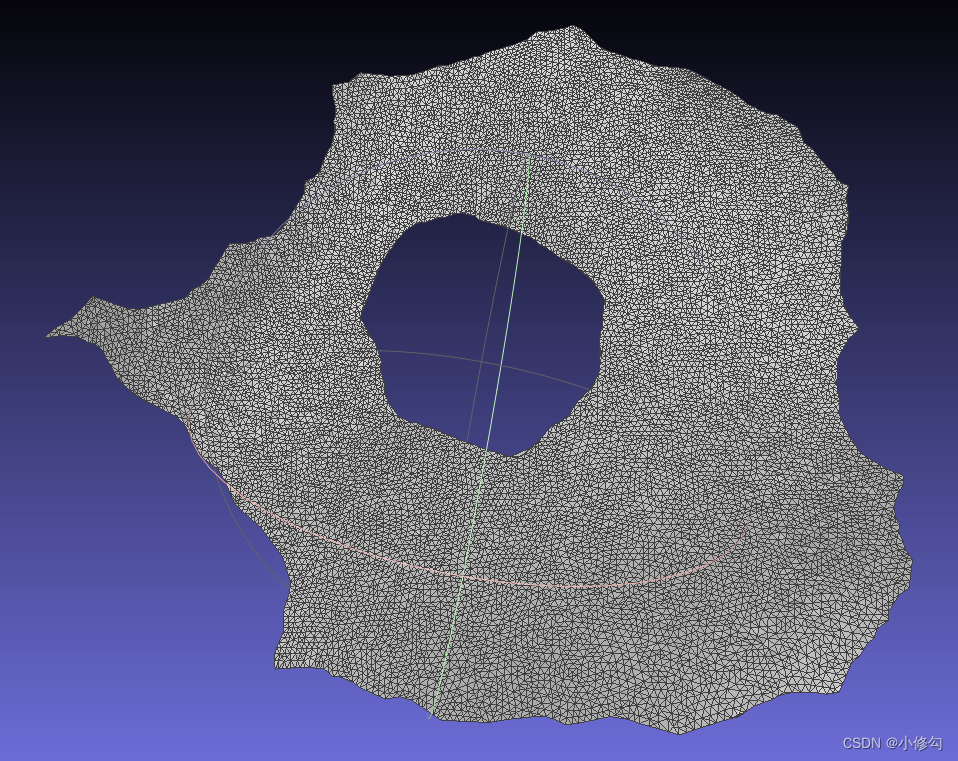
2)优化策略:我们根据重建后的网格可以得出,错误的三角面片与正确的三角面片往往几何差异巨大,比如边界,面片面积等;
据此,我们设计一个几何特征过滤器,将差异化的面片进行滤除。过滤器选择依据自己点云特征。最终加上几何特征过滤器后重建结果,可以看出,效果非常优越。
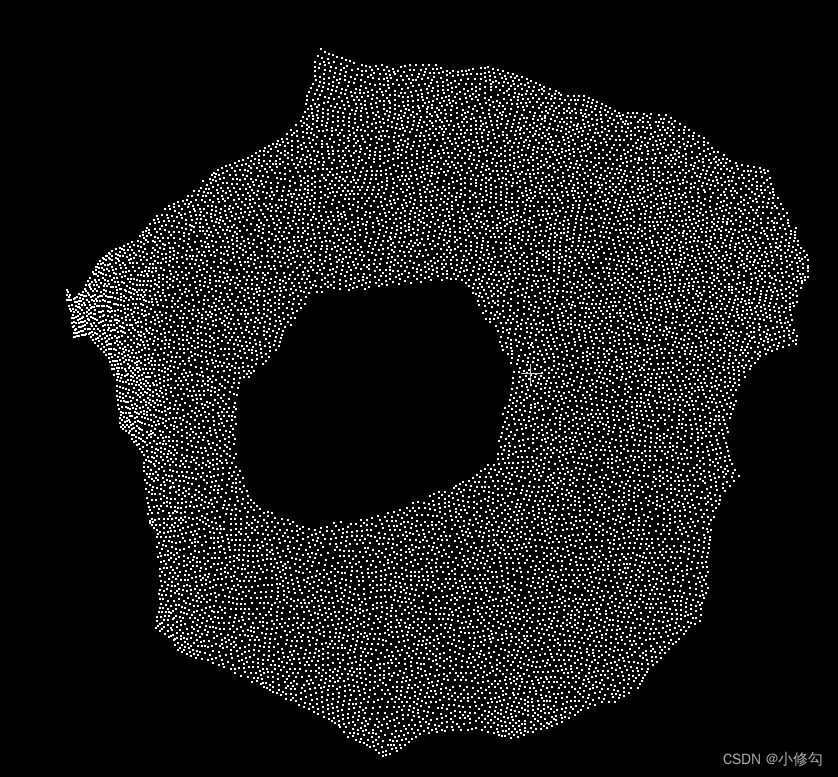
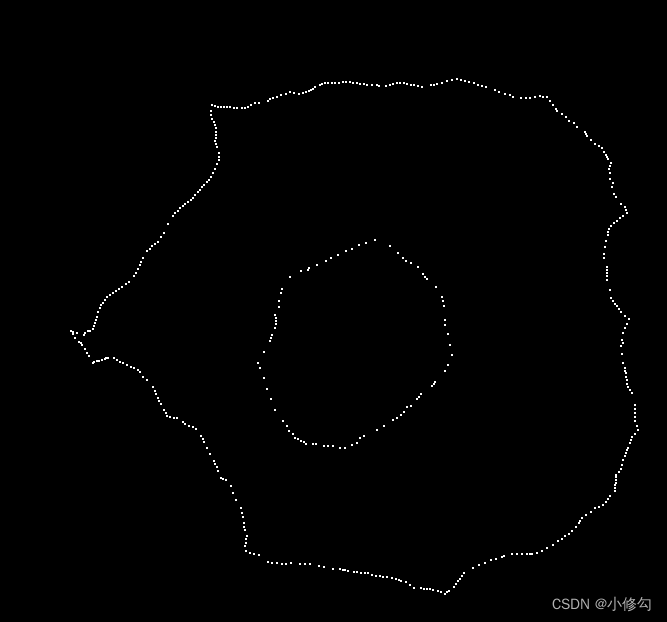
3)边界提取:根据上述原理,进行边界提取,效果如下:
4)顺序提取:我们通过重建提取出边界点后,同样可以根据半边数据结构进行空间点排序,具体原理不做详细描述了。最终效果图如3所示
3、实现效果
三、思路二:利用PCL边界提取方法+三维空间点排序
1、原理
| 此方法原理简单,主要分为几个步骤;1)pcl边界提取;2)聚类分割获取边界数量;3)空间点的排序 |
2、实现步骤
1)边界提取:采用pcl中常见的几种边界提取方法,效果如下:
1)基于法线:参数(30,30,2)——单纯记录一下,以防后续需要。
2)滚球法:效果不行,可能参数不行,后续试试cgal中相关算法。

2)聚类分割:通过聚类分割即可分割出相应的内边界与外边界。
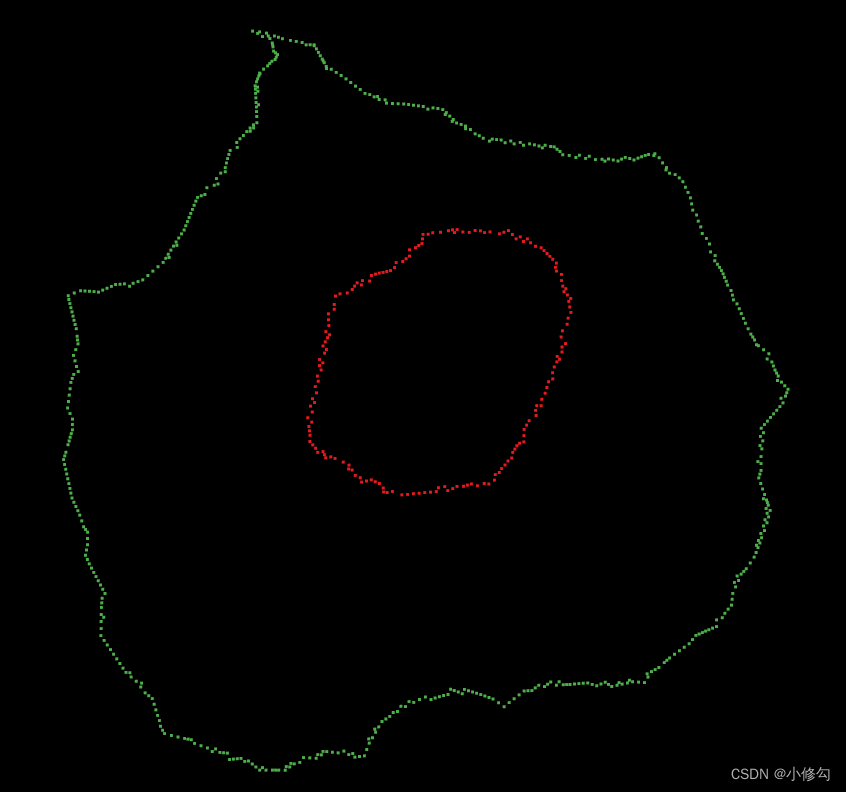
3)空间点排序:参考二维边界点云顺序(逆向)排序,点云侠——二维边界点排序。结果如3所示。此方法针对局部变化明显的地方会存在误判,仍需注意。
3、实现效果
内边界
外边界
其他数据
四、后续
后续还需要将此位置信息发送至机器人,引导机器人轨迹优化。但目前边界点并不是均匀点,仍需要进行均匀化采样,此步暂且不提。
代码后续补充到《点云算法处理》,over!!!!












![[附源码]计算机毕业设计JAVAjsp心理测评系统](https://img-blog.csdnimg.cn/cb033dfc706b44f6954173a3b53694e2.png)