目录
代码
分析
RunOnce 函数分析
UpdateState函数分析
发送时间延迟报告函数分析
备注
代码
class LatencyMonitor : public RecurrentRunner {
public:
LatencyMonitor();
void RunOnce(const double current_time) override;
bool GetFrequency(const std::string& channel_name, double* freq);
private:
void UpdateStat(
const std::shared_ptr<apollo::common::LatencyRecordMap>& records);
void PublishLatencyReport();
void AggregateLatency();
apollo::common::LatencyReport latency_report_;
std::unordered_map<uint64_t,
std::set<std::tuple<uint64_t, uint64_t, std::string>>>
track_map_;
std::unordered_map<std::string, double> freq_map_;
double flush_time_ = 0.0;
};
void LatencyMonitor::RunOnce(const double current_time) {
static auto reader =
MonitorManager::Instance()->CreateReader<LatencyRecordMap>(
FLAGS_latency_recording_topic);
reader->SetHistoryDepth(FLAGS_latency_reader_capacity);
reader->Observe();
static std::string last_processed_key;
std::string first_key_of_current_round;
for (auto it = reader->Begin(); it != reader->End(); ++it) {
const std::string current_key =
absl::StrCat((*it)->module_name(), (*it)->header().sequence_num());
if (it == reader->Begin()) {
first_key_of_current_round = current_key;
}
if (current_key == last_processed_key) {
break;
}
UpdateStat(*it);
}
last_processed_key = first_key_of_current_round;
if (current_time - flush_time_ > FLAGS_latency_report_interval) {
flush_time_ = current_time;
if (!track_map_.empty()) {
PublishLatencyReport();
}
}
}分析
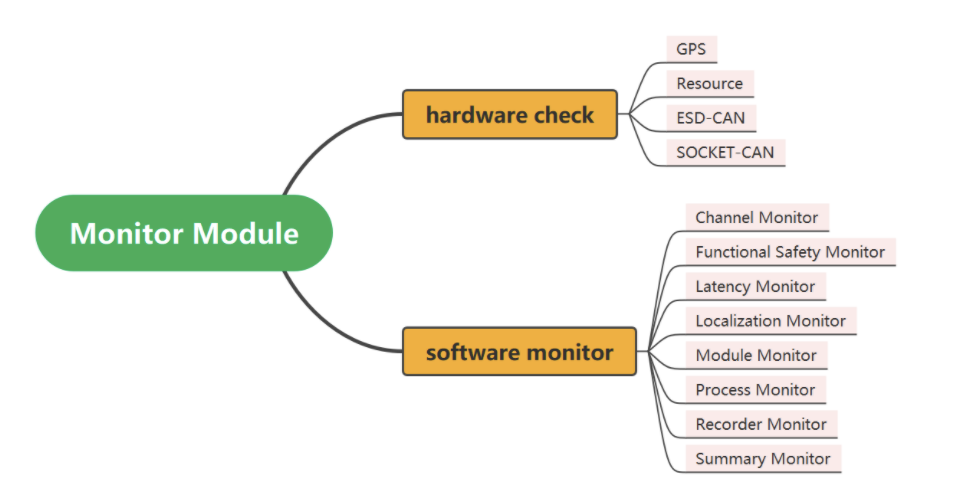
分析之前先回忆一下,之前模块channel 的之间的时间延迟就是通过LatencyMonitor 实现的,所以LatencyMonitor的工作就是收集各种时间延迟,并且汇总形成一个报告。
RunOnce 函数分析
订阅latency_recording_topic,消息体是LatencyRecordMap
message LatencyRecord {
optional uint64 begin_time = 1;
optional uint64 end_time = 2;
optional uint64 message_id = 3;
};
message LatencyRecordMap {
optional apollo.common.Header header = 1;
optional string module_name = 2;
repeated LatencyRecord latency_records = 3;
};遍历订阅到的所有的信息,然后使用UpdateStat 进行状态更新
UpdateState函数分析
void LatencyMonitor::UpdateStat(
const std::shared_ptr<LatencyRecordMap>& records) {
const auto module_name = records->module_name();
for (const auto& record : records->latency_records()) {
track_map_[record.message_id()].emplace(record.begin_time(),
record.end_time(), module_name);
}
if (!records->latency_records().empty()) {
const auto begin_time = records->latency_records().begin()->begin_time();
const auto end_time = records->latency_records().rbegin()->end_time();
if (end_time > begin_time) {
freq_map_[module_name] =
records->latency_records().size() /
apollo::cyber::Time(end_time - begin_time).ToSecond();
}
}
}- 保存每个 msg 的耗时信息到 track_map_
- 更新 freq_map 中模块的频率信息
发送时间延迟报告函数分析
void LatencyMonitor::PublishLatencyReport() {
static auto writer = MonitorManager::Instance()->CreateWriter<LatencyReport>(
FLAGS_latency_reporting_topic);
apollo::common::util::FillHeader("LatencyReport", &latency_report_);
AggregateLatency();
writer->Write(latency_report_);
latency_report_.clear_header();
track_map_.clear();
latency_report_.clear_modules_latency();
latency_report_.clear_e2es_latency();
}
void LatencyMonitor::AggregateLatency() {
static const std::string kE2EStartPoint = FLAGS_pointcloud_topic;
std::unordered_map<std::string, std::vector<uint64_t>> modules_track;
std::unordered_map<std::string, std::vector<uint64_t>> e2es_track;
std::unordered_set<std::string> all_modules;
// Aggregate modules latencies
std::string module_name;
uint64_t begin_time = 0, end_time = 0;
for (const auto& message : track_map_) {
auto iter = message.second.begin();
while (iter != message.second.end()) {
std::tie(begin_time, end_time, module_name) = *iter;
modules_track[module_name].push_back(end_time - begin_time);
all_modules.emplace(module_name);
++iter;
}
}
// Aggregate E2E latencies
std::unordered_map<std::string, uint64_t> e2e_latencies;
for (const auto& message : track_map_) {
uint64_t e2e_begin_time = 0;
auto iter = message.second.begin();
e2e_latencies.clear();
while (iter != message.second.end()) {
std::tie(begin_time, std::ignore, module_name) = *iter;
if (e2e_begin_time == 0 && module_name == kE2EStartPoint) {
e2e_begin_time = begin_time;
} else if (module_name != kE2EStartPoint && e2e_begin_time != 0 &&
e2e_latencies.find(module_name) == e2e_latencies.end()) {
const auto duration = begin_time - e2e_begin_time;
e2e_latencies[module_name] = duration;
e2es_track[module_name].push_back(duration);
}
++iter;
}
}
// The results could be in the following fromat:
// e2e latency:
// pointcloud -> perception: min(500), max(600), average(550),
// sample_size(1500) pointcloud -> planning: min(800), max(1000),
// average(900), sample_size(1500) pointcloud -> control: min(1200),
// max(1300), average(1250), sample_size(1500)
// ...
// modules latency:
// perception: min(5), max(50), average(30), sample_size(1000)
// prediction: min(500), max(5000), average(2000), sample_size(800)
// control: min(500), max(800), average(600), sample_size(800)
// ...
auto* modules_latency = latency_report_.mutable_modules_latency();
for (const auto& module : modules_track) {
SetLatency(module.first, module.second, modules_latency);
}
auto* e2es_latency = latency_report_.mutable_e2es_latency();
for (const auto& e2e : e2es_track) {
SetLatency(absl::StrCat(kE2EStartPoint, " -> ", e2e.first), e2e.second,
e2es_latency);
}
}可以看出主要是两个部分的时间延迟:
- 所有模块的时间延迟
- E2E 的时间延迟
这里的E2E就是端到端的时间延迟,在apollo 中指的是电晕信息到各个模块输出的时间。
E2E Latency 的逻辑:
- 记录第一条点云数据的开始时间
- 依次记录那些不是点云数据的记录的开始时间,计算它们之间的差值,就成了这一个测试周期的 E2E 时延。
备注
Latency 的运行基于依靠于 CyberRT 的通信,所以,也必须保证 CyberRT 的 Channel 通信机制足够可靠,不然会产生误差。

![[附源码]Python计算机毕业设计SSM隆庆祥企业服装销售管理系统(程序+LW)](https://img-blog.csdnimg.cn/e5fa0145c45047fca2c855eddcd4860e.png)