一.基础知识
1.什么是SPI
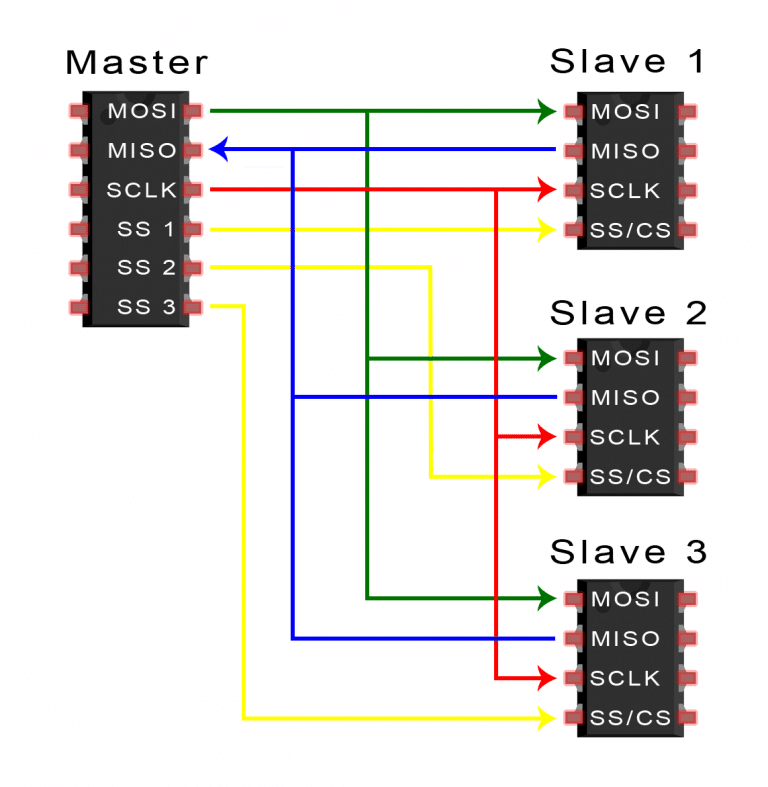
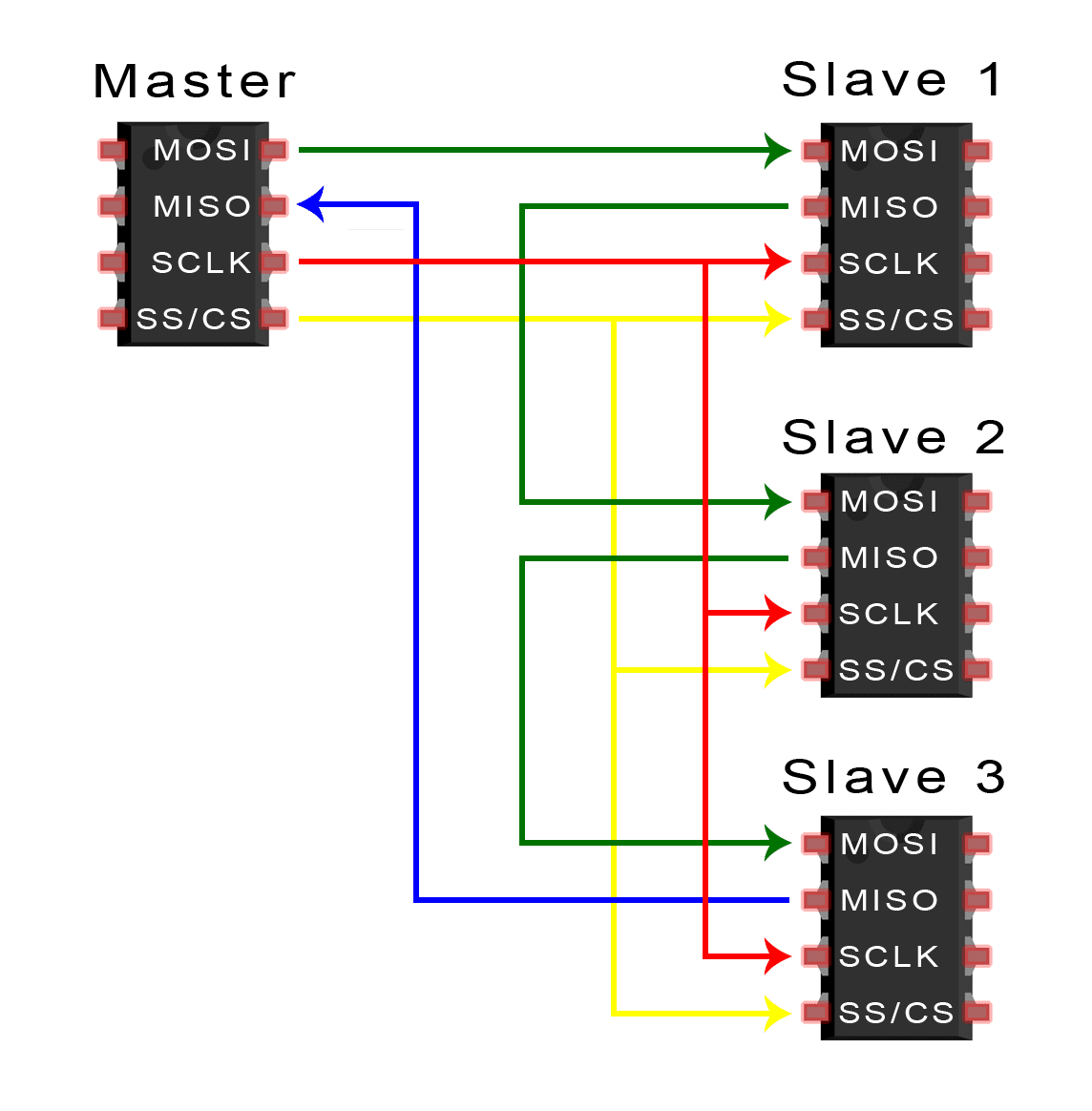
SPI(Serial Peripheral Interface,串行外设接口)是一种同步的串行通信协议,它被用于在微控制器、存储器芯片、传感器和其他外围设备之间传输数据。SPI通常由四个线组成:时钟线(SCK)、主设备输出/从设备输入(MOSI)、从设备输出/主设备输入(MISO)和片选线(SS)。SPI通信中,数据在时钟的边沿上进行传输,以实现高速、可靠的数据传输。SPI可以支持单主机和多从机的连接方式,并且具有简单、灵活和可扩展的特点。
(主从连接方式1:一个主机上有多个SS片选信号去连接从机,如下图)
(主从连接方式2:一个主机上只有一个片选信号可以通过daisy-chained(菊花链)进行连接,如下图)
备注:图片来源于https://www.circuitbasics.com/basics-of-the-spi-communication-protocol/。
2.SPI和IIC有什么不同
SPI和I2C(Inter-Integrated Circuit,即IIC)都是常见的串行通信协议,它们在一些方面有所不同:
-
总线结构:SPI是点对点的结构,每个设备占用一个片选线;而I2C是多主从结构,允许多个设备通过两根共享的线路进行通信。
-
传输速率:SPI的传输速率通常比I2C更快,SPI可以达到几百MHz的传输速率,而I2C通常只能达到几十kHz或几百kHz的传输速率。
-
电气特性:SPI时钟线和数据线的电平是由驱动器控制的,因此SPI的电气特性更容易控制和优化,而且SPI在长距离传输时噪声抗干扰能力更强;而I2C的时钟和数据线由开漏输出控制,需要加上外部上拉电阻,电气特性控制相对较难。
-
硬件资源:SPI传输需要占用多个GPIO,因此需要更多的硬件资源来实现;而I2C只需要两个GPIO,可以减少芯片上的硬件资源占用。
总之,SPI和I2C都有其适用的场景。SPI适用于高速、简单的点对点通信,而I2C适用于多设备的通信,因为I2C允许多个设备在同一个总线上进行通信。
3.SPI的优缺点
优点:
- 没有启动和停止位,所以数据可以不间断地连续流
- 没有像 I2C 这样复杂的从站寻址系统
- 数据传输速率比 I2C 高(几乎是 I2C 的两倍)
- 单独的MISO 和 MOSI 线路,这样数据可以同时发送和接收
缺点:
- 使用四根线(I2C 和 UART 使用两根)
- 没有确认数据已经成功接收(I2C 有这个)
- 没有像 UART 中奇偶校验位那样的错误检查形式
- 只允许一个master
4.SPI是怎么实现通信的
① 在SPI通信中,数据是通过一个主设备与一个或多个从设备进行的。通信的过程是主设备向从设备发送数据,并且同时接收从设备发回的数据。SPI总线由四个信号线构成,分别是:
-
SCLK(Serial Clock):时钟线,用于同步主从设备之间的数据传输。
-
MOSI(Master Out Slave In):主设备输出数据到从设备的信号线。
-
MISO(Master In Slave Out):从设备输出数据到主设备的信号线。
-
SS(Slave Select):从设备的选中信号线,用于让主设备控制从设备的选择。
② 简单来说,当主设备需要跟某个从设备通信时,它会先把该从设备的SS线拉低(低电平有效还是高电平有效要根据元件的数据手册来看),表示选中该从设备,然后主设备以时钟信号为基准,通过MOSI线发送数据,从设备则通过MISO线将响应数据发回主设备。通信结束后,主设备会将该从设备的SS线拉高,表示不再选中该从设备。
③ SPI通信的速度可以通过调整时钟频率来实现,而具体的通信协议和数据格式则需要根据具体的应用场景来确定。
5.SPI 数据传输的步骤
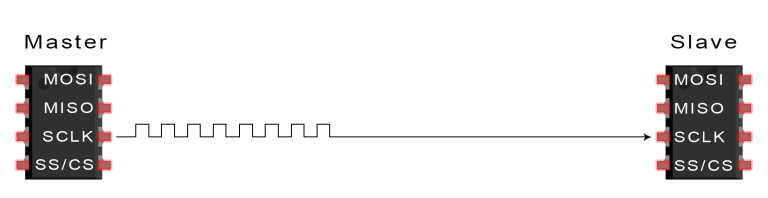
- 主机(master)输出时钟信号
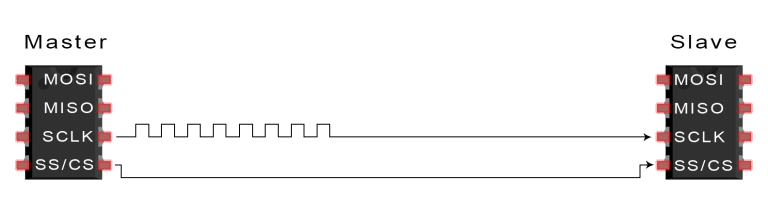
- 主机(master)将对应从机(方式一)的片选信号切换到低电平,从而激活对应从机
- 主机(master)通过MOSI线向从设备一次一位地向从机发送数据,从设备读取接收到的数据
- 如果从设备有相应的回应,从设备通过MISO线向主设备一次一位地向主机发送数据,主设备读取接收到的数据
6.SPI菊花链
在SPI菊花链方式中,各个从机的MISO(Master In Slave Out)输入都连接到前一个从机的MOSI(Master Out Slave In)输出上,一直到链的最后一个从机(如下图所示)。主机通过片选信号来选择与其通讯的从机,只有被选中的从机的MISO输出的数据才会被主机的MOSI输入。

备注:图片来源于https://zhuanlan.zhihu.com/p/290620901
具体的连接图如下:
SPI菊花链方式通信的基本步骤:
-
主机发送片选信号(CS)来选择要与之通讯的从机。
-
在所选从机的MISO输入处放置数据,同时主机在MOSI输出口发送相应的数据。
-
当所选从机选定数据并将其内容从MISO输出时,主机也会将其内容从它的MISO输入口中读取,完整的数据交换完成。
-
当主机需要与另一个从机通讯时,它会将片选信号切换到下一个从机上,然后重复上述步骤。
-
当通讯完成时,主机可以停止发送片选信号。
需要注意的是,在SPI菊花链方式中,所有从机的MISO都连接在同一条线上。在未选中的情况下,从机将忽略主机发出的数据。因此,在设计SPI系统时需要确保未选中的从机在通讯期间处于高阻状态,以避免因为信号冲突而产生干扰。
- 上文说所的未选中
① SPI菊花链中,所有从机都与同一条MISO线相连,但是在不同时间内只会有一个从机处于被选中状态,其他从机都处于未选中状态。这是通过从机的片选信号(CS)来实现的。当主机选择与某个从机通信时,它会向该从机的CS引脚发送低电平信号,从而告诉该从机它正在被选中。其他未被选中的从机,它们未选中时CS引脚通常为高电平状态,并且未选中的从机的MISO输出需要设置为高阻状态。
② 因此,在SPI菊花链方式中,需要确保未被选中的从机在通讯期间处于高阻状态,以避免干扰。最好的做法是在主机与某个从机通信之前,先将所有其他未选中的从机的片选信号拉高,保证它们的MISO输出都处于高阻状态。这样可以减少通信期间出现干扰的可能性。
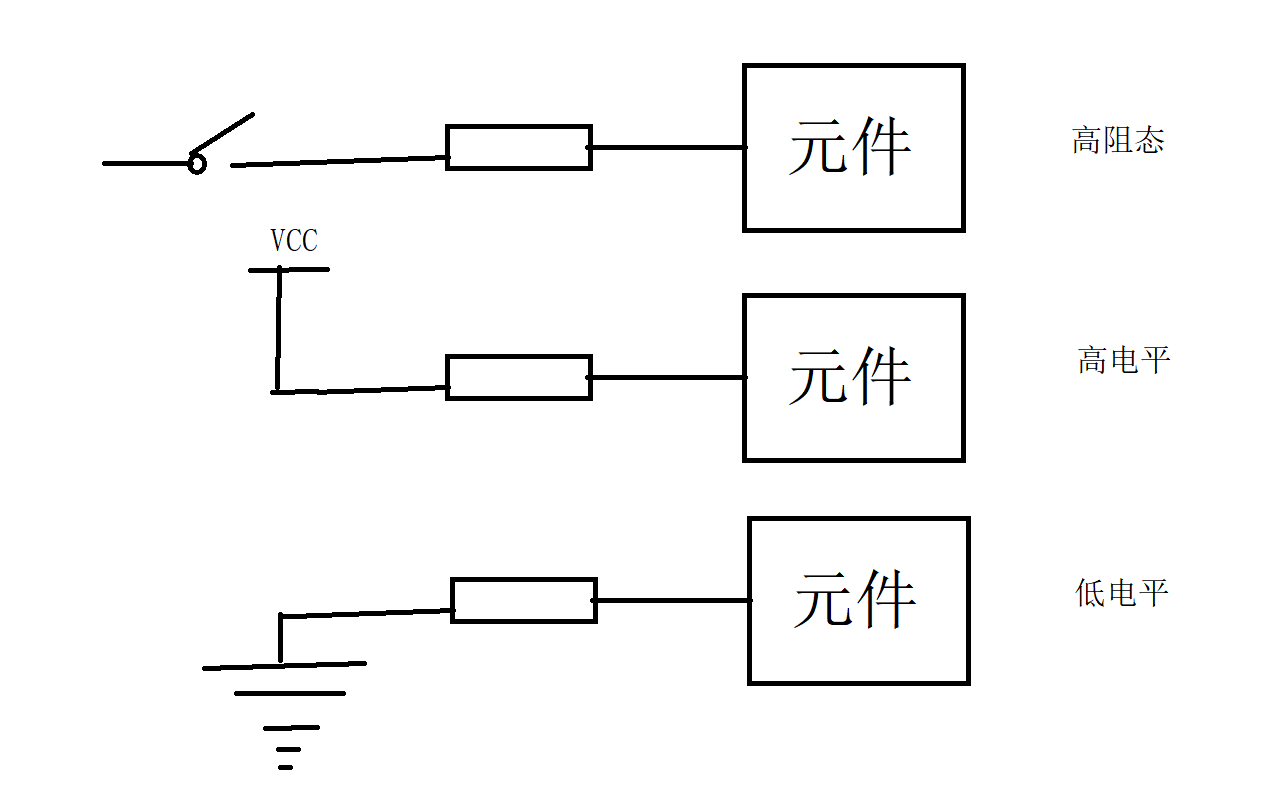
- 什么是高阻态
① 高阻状态是指一个电路中的输入端或输出端等待输入或输出信号时,它处于一种电气状态,该状态被称作高阻态或三态,简称"Z"态。处于高阻态的信号线会表现出一种很高的电阻,阻止其他电路对其进行电流或电压的驱动,这样可以保证电路的安全和稳定性。
② 在数字电路中,高阻态被广泛应用于多路复用器、锁存器和开关等电路中。例如,在多路复用器中,当选择器控制线不代表选中任何一个输入端口时,所有的输入端口都处于高阻状态,以避免输入端口之间的干扰。在锁存器中,当时钟信号处于非稳定状态时,输入端口处于高阻态,以避免输出端脱离预期状态。在开关中,当输出端口未被激活时,它处于高阻状态,以防止从该端口流出意外的电流引起不必要的能量损耗。
7.通过SPI实现数据的读和写
通过SPI协议进行数据的读写操作和其他通信协议(UART,IIC)一样也会有相应的数据格式,下面给出是93C46存储器的SPI数据读写的格式(具体的读写的数据各式可以通过数据手册进行获取)。
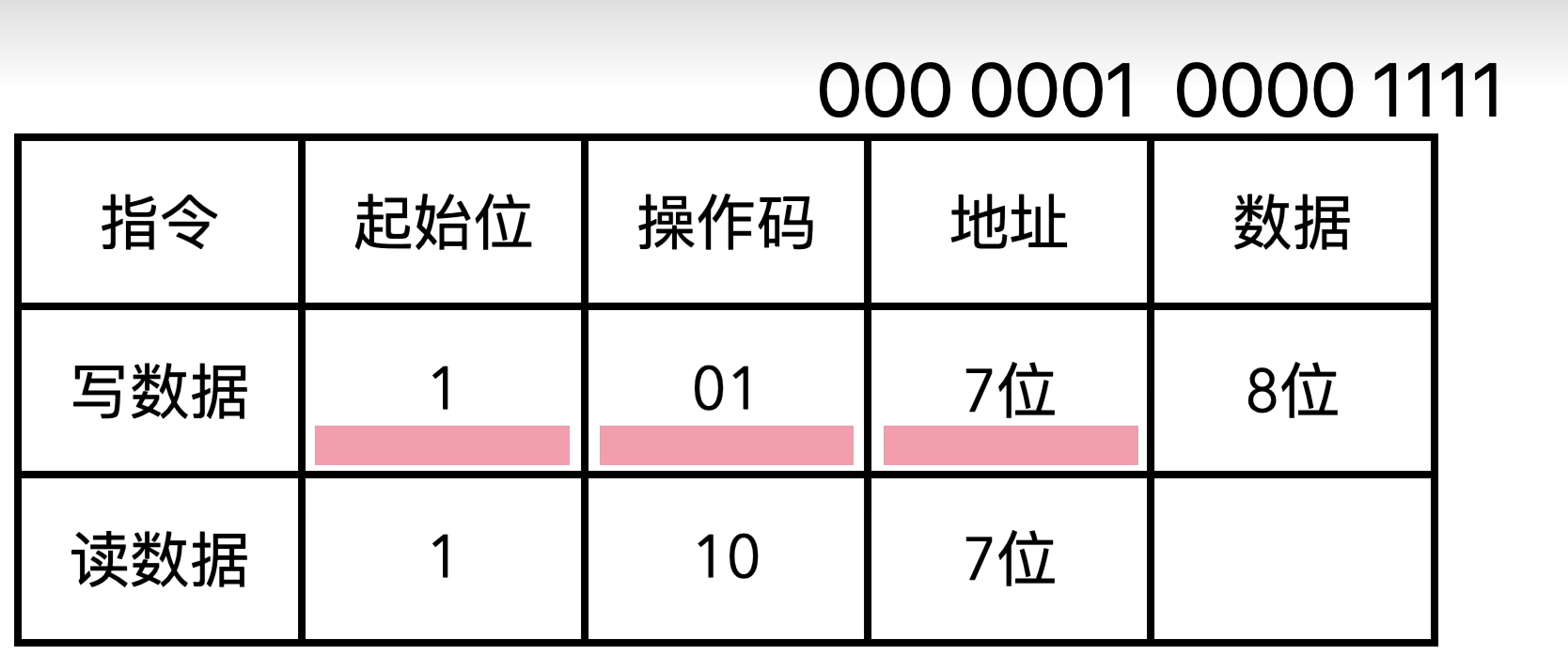
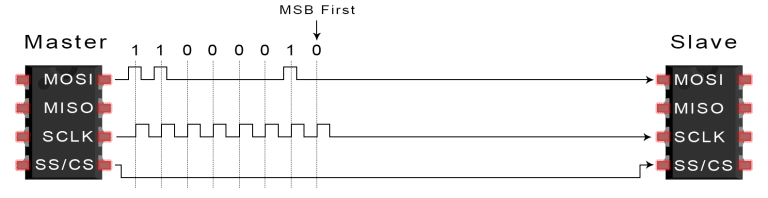
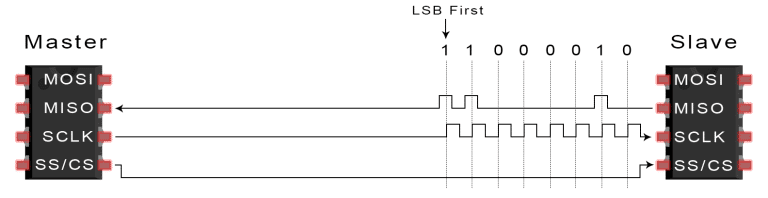
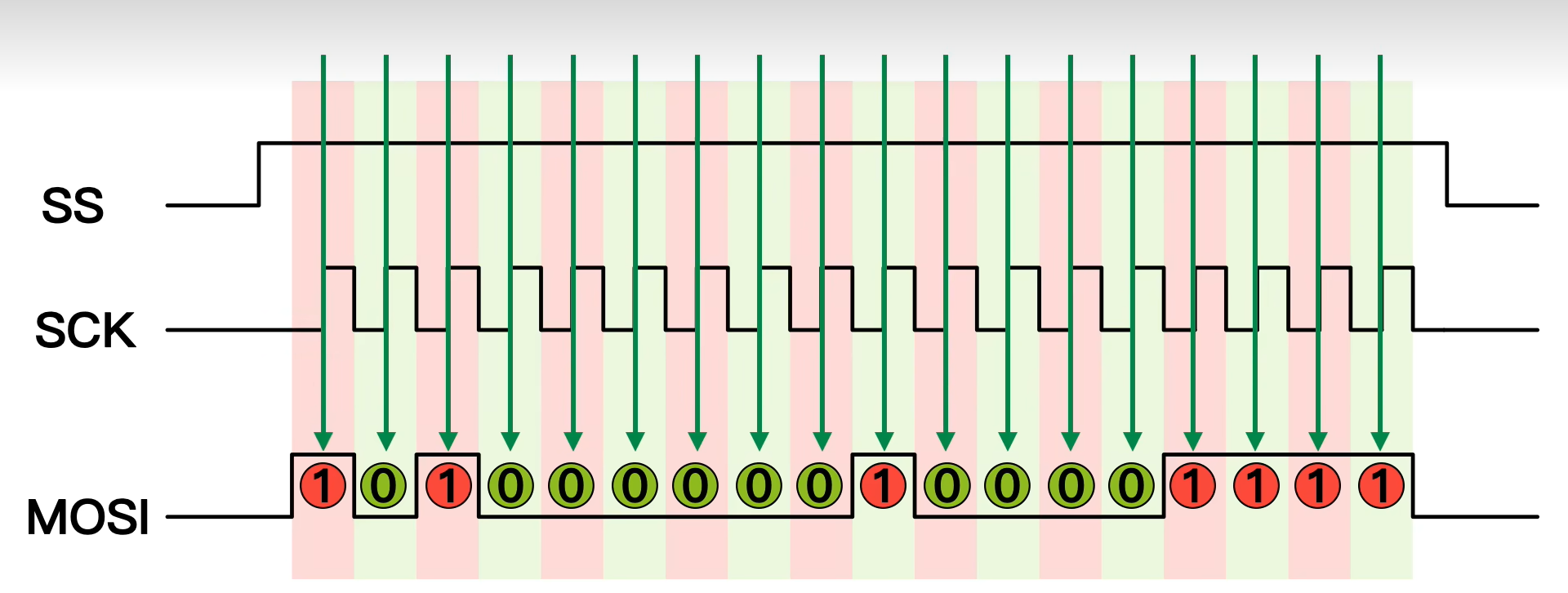
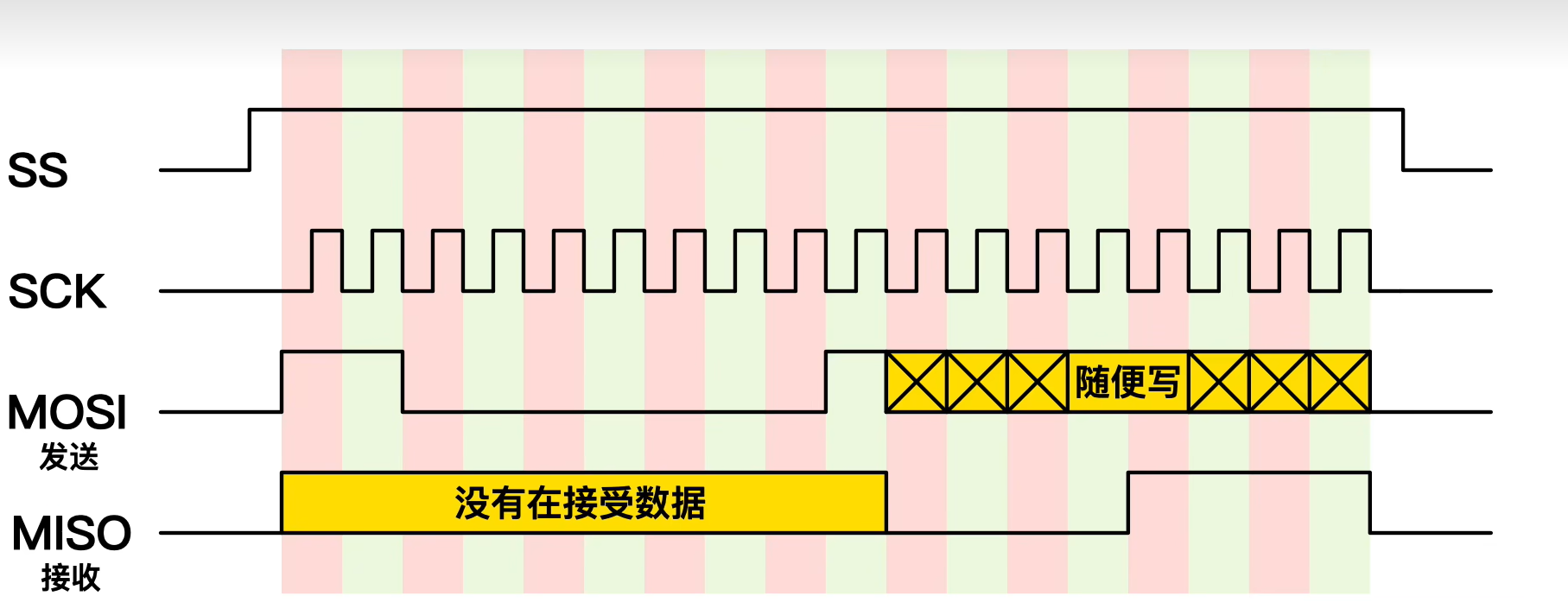
和异步不同的是,数据的发送会受到时钟线的控制,如下,就是当SS(片选线)为高电平时,进行数据的读写操作,从机采样数据由极性和相位决定,极性决定时钟SCK空闲时是高电平还是低电平,相位决定在第一个跳边沿还是第二个跳边沿进行数据采集,下图就是极性为低电平,相位为第一个跳边沿(低->高)进行数据采集,采集MOSI上的数据,从机采集到了1 01 0000001 0000 1111的数据,再进行解析,数据解析的结果表示将进行写数据,向000 0001地址写入数据0000 1111。
① SPI数据采样是由SPI总线信号的时钟极性和相位来决定的。通常情况下,SPI信号是由主设备(如微控制器)发出的,从设备(如传感器或存储器)则根据时钟信号进行响应。使用SPI时,必须确保主设备与从设备使用相同的时钟极性和相位,以确保数据采样的正确性。
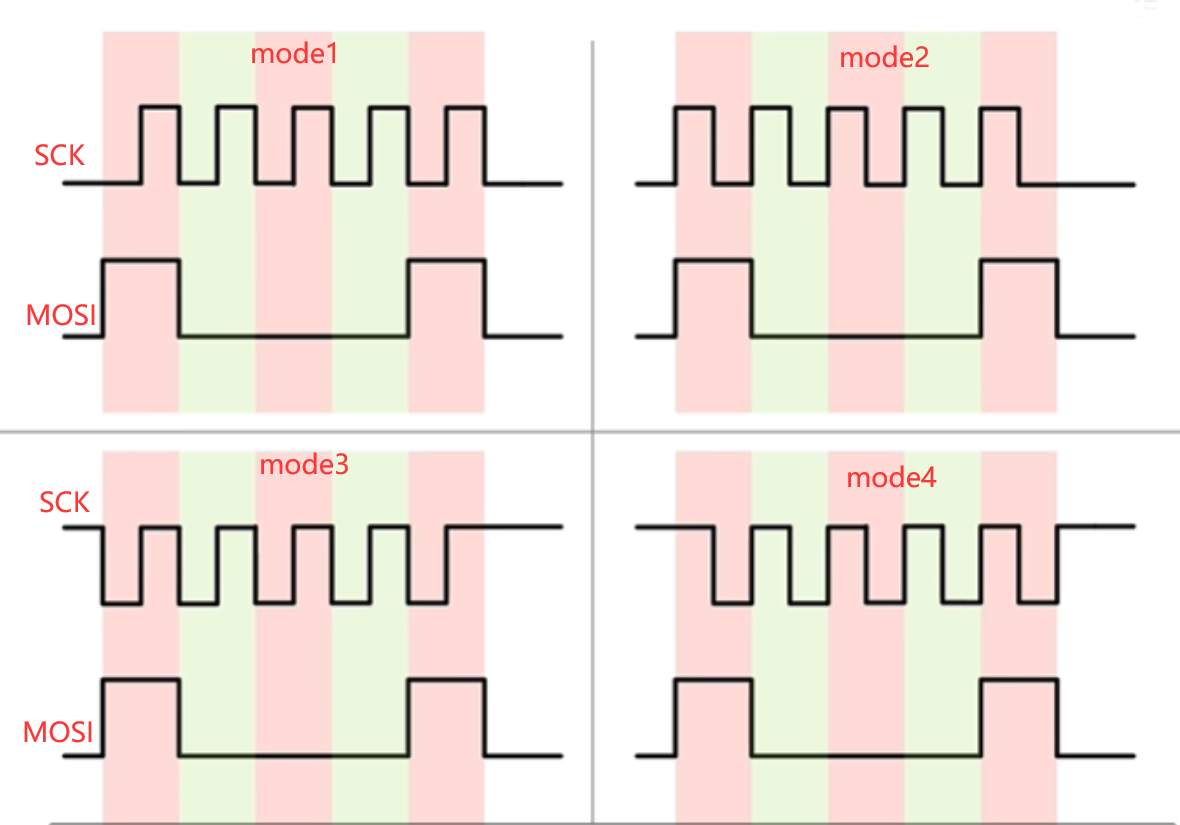
② SPI采样方式有四种:mode0、mode1、mode2和mode3。下面分别介绍各种采样方式的时钟极性和相位:
-
mode0:时钟极性为0,时钟相位为0。时钟极性为0表示空闲时时钟处于低电平,采样时时钟沿上升。时钟相位为0表示数据采样在时钟的上升沿进行,数据产生在下降沿。mode0是最常用的采样方式。
-
mode1:时钟极性为0,时钟相位为1。时钟相位为1表示数据采样在时钟的下降沿进行,数据产生在上升沿。
-
mode2:时钟极性为1,时钟相位为0。时钟极性为1表示空闲时时钟处于高电平,采样时时钟沿下降。时钟相位为0表示数据采样在时钟的下降沿进行,数据产生在上升沿。
-
mode3:时钟极性为1,时钟相位为1。时钟相位为1表示数据采样在时钟的上升沿进行,数据产生在下降沿。
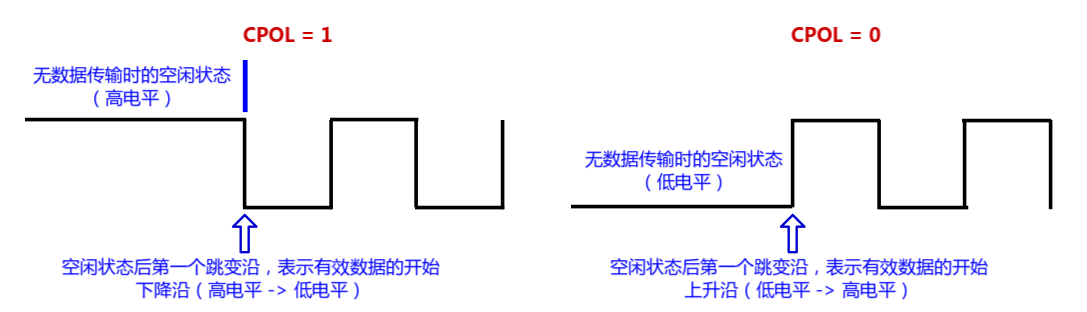
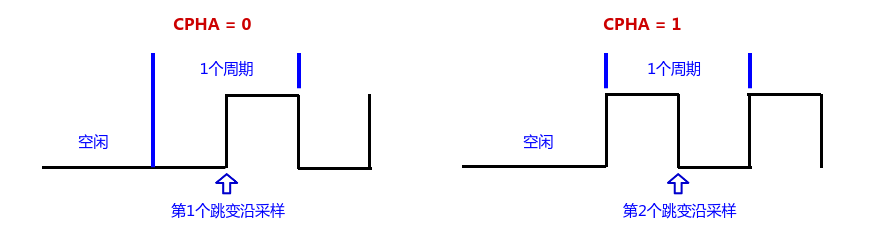
上面的解析可能不容易进行理解,大致意思就是SPI由极性和相位决定,极性和相位有二种取值即0和1,这样一共就由4种采集方式(00 01 10 11),其中当极性为0时表示时钟空闲状态为低电平(第一个跳变为上升沿),为1表示时钟空闲状态为高电平(第一个跳变为下降沿);而相位为0表示在第一个跳边沿进行数据采集,为1时表示在第二个跳边沿进行数据采集。下图中的图1的CPOL表示极性;图2CPHA表示相位;这二张图片来源于https://www.cnblogs.com/gmpy/p/12461461.html。
(图1)
(图2)
具体的四种采样方式如下图所示:
至于数据的读取,主机先通过MOSI向从机发送读取的操作指令(1 10 地址),然后就可以通过MISO,从从机上面采集到对应的数据。

备注上图的图片和表格来源于:https://www.bilibili.com/video/BV1F54y1M7e7/
二.STM32F103C8T6芯片SPI协议案例代码
以下是一个基于STM32F103C8T6单片机的SPI协议案例代码,仅供参考(来源于ChartGPT):
#include "stm32f10x.h"
#define SPI_SCK_PIN GPIO_Pin_5 //SPI时钟引脚
#define SPI_MISO_PIN GPIO_Pin_6 //SPI数据接收引脚
#define SPI_MOSI_PIN GPIO_Pin_7 //SPI数据发送引脚
#define SPI_CS_PIN GPIO_Pin_4 //SPI片选引脚
void SPI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_SPI1, ENABLE); //使能SPI1外设时钟
//配置SPI1对应的GPIO口
GPIO_InitStructure.GPIO_Pin = SPI_SCK_PIN | SPI_MOSI_PIN | SPI_CS_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = SPI_MISO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//配置SPI1参数
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE); //使能SPI1外设
}
void SPI_SendByte(SPI_TypeDef* SPIx, uint8_t byte)
{
while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_TXE) == RESET) ; //等待发送缓冲区为空
SPI_I2S_SendData(SPIx, byte); //将数据写入发送缓冲区
while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_RXNE) == RESET) ; //等待接收缓冲区非空
SPI_I2S_ReceiveData(SPIx); //读取接收缓冲区数据,清除标志位
}
uint8_t SPI_ReceiveByte(SPI_TypeDef* SPIx)
{
while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_TXE) == RESET) ; //等待发送缓冲区为空
SPI_I2S_SendData(SPIx, 0xFF); //发送一个空数据,触发SPI通信
while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_RXNE) == RESET) ; //等待接收缓冲区非空
return SPI_I2S_ReceiveData(SPIx); //读取接收缓冲区数据
}
int main(void)
{
uint8_t tx_data = 0x55;
uint8_t rx_data;
SPI_Init(); //初始化SPI1
GPIO_ResetBits(GPIOA, SPI_CS_PIN); //拉低SPI片选引脚,开始SPI通信
SPI_SendByte(SPI1, tx_data); //发送数据
rx_data = SPI_ReceiveByte(SPI1); //接收数据
GPIO_SetBits(GPIOA, SPI_CS_PIN); //拉高SPI片选引脚,结束SPI通信
while (1)
{
//此处可添加其他代码
}
}
以上代码实现了STM32F103C8T6单片机的SPI通信,并利用SPI1对应的GPIO口进行了初始化配置。在主函数中,通过拉低片选引脚、发送数据、接收数据、拉高片选引脚的方式实现了SPI通信。用户可以根据实际需求,在SPI_SendByte和SPI_ReceiveByte函数中修改数据的长度和数据位数等参数。