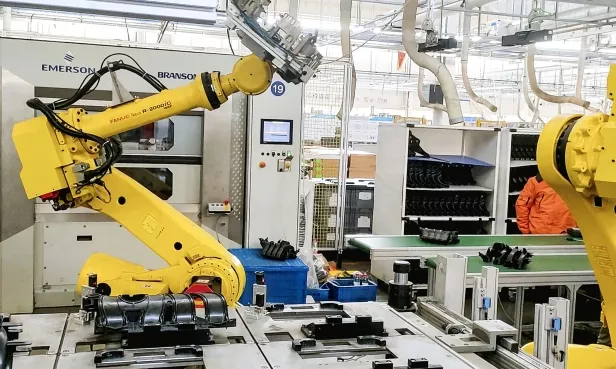
法兰件上料
某大型汽配厂
项目背景
客户为某知名外资汽车零部件企业,其位于华东的工厂需求3D视觉实现喷砂机床的上料自动化。工件为板状多孔金属件, 厚度仅5mm,有序堆叠于深筐,需匹配喷砂机床高速上料作业。
作业流程
• 人工运送料筐就位,视觉定位料筐位置
• 视觉拍照引导机器人抓取,一排4个平行放置于喷砂机床
• 重复以上动作直至清筐
方案亮点
• 采用XM-GX-L相机,精度±2mm
• 视觉节拍<3s,整体节拍<5s,实现机床生产效益最大化
• 工件厚度仅5mm,视觉有效识别,高效清筐
• 支持快速注册切换工件,适配十余种规格,柔性生产

轮毂抓取上架
某大型汽配厂
项目背景
客户为某知名外资汽车零部件企业,其位于华东的工厂需求3D视觉实现轮毂的上架自动化。工件为多孔圆盘状钢铁件,表面材质反光,由防锈纸隔开逐层平铺放置于深筐,料筐四周有塑料薄膜包裹。工件抓取后,需逐一放置料架上便于进行下一步工序。
作业流程
• 人工运送料筐就位,视觉定位料筐位置
• 视觉拍照识别轮毂位姿,引导机器人逐一抓取并放置料架上
• 清空一层后,换下防锈纸再进行下一层作业,直至清筐
方案亮点
• 采用XM-GX-L相机,安装移动模组上,可对双工位的反光工件、料筐进行高精度识别
• 可应对一定程度的塑料薄膜遮挡,稳定识别抓取
• 支持快速注册切换工件,柔性生产
引擎盖上料
某上市汽配企业
项目背景
客户为华东某上市汽车零部件企业,需求借助3D视觉实现引擎盖的自动上料和合模。工件为纯黑色POM注塑材质,轻微反光,外观结构复杂。经由皮带线运输至机器人工作位,下游对接超声波焊接设备中进行装配焊接。
作业流程
• 中模到达拍照位,触发相机拍照,引导机器人抓取至治具位
• 上模到达拍照位,触发相机拍照,引导机器人抓取进行合模
方案亮点
• 采用XM-SP-L相机,精度±2mm
• 视觉拍照时间<3s,满足生产节拍需求
• 配合产线24小时运行,大幅降低作业成本

控制臂上料
某大型汽配厂
项目背景
客户为某知名外资汽车零部件企业,其位于华东的工厂需求3D视觉实现控制臂的上料自动化。工件共9种规格,均为铝合金铸件,表面材质高度反光。工件经皮带线运输,需抓取放置于治具台上。
作业流程
• 皮带线输送工件至机器人工作位
• 视觉拍照识别工件位姿,引导机器人抓取
方案亮点
• 采用XM-GX-M相机,固定方式安装,可对高反光工件进行精度XY方向±3mm,Z方向±1mm的识别定位
• 支持新增工件、夹具、抓取方式的快速注册和切换,实现柔性生产
返回列表
![[附源码]Python计算机毕业设计Django大学生创新项目管理系统](https://img-blog.csdnimg.cn/7e4d74cc0c1a44c88eaf46e1f9c1dbd7.png)









![[附源码]SSM计算机毕业设计学生量化考核管理系统JAVA](https://img-blog.csdnimg.cn/63ce37d0bd244a22a25a090a475fece8.png)