目录
一.简介
二.原理
1.先验估计原理
2.后验估计原理
3.总结
三.示例
一.简介
卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法,它可以在任意含有不确定信息的动态系统中使用,用来对目标的位置进行预测,并且利用预测结果对跟踪的目标进行修正,属于自动控制理论中的一种方法。它很适合持续变化的系统,并且占用内存少,非常适合实时问题与嵌入系统,在单目标还是多目标领域都是很常用的一种算法。
例如一个无人驾驶汽车想要在城市中自由行驶,它必须知道自己的确切位置才能进行导航。关于如何导航,我们一般有以下方式:
- GPS装置,但缺点是精度可能太低;
- 里程表、惯性测量等传感器得出的信息;
- 汽车发动机温度、邮箱液体量信息;
- 汽车运动程序本身发出的指令等。
以上信息存在精度误差,并且实际行驶情况可能存在自然与非自然因素影响,所以得出的导航结果不是非常准确。
卡尔曼滤波的作用就是综合利用以上信息,根据其本身噪声,分配一定权重,去估计获得一个导航信息的最优估计。
二.原理
不同的场景有不同的预测函数,比如在汽车行驶场景中,汽车的初始速度、位置、加速度等信息,结合速度、位置的计算公式可以预测出汽车下一时刻速度、位置状态信息,我们称之为原始预测结果;汽车的里程表、GPS等设备的传感器也会给我们汽车下一时刻速度、位置的状态信息,我们称之为观测结果;根据观测结果对原始预测结果进行修正,得到的结果称为预测结果(也称先验估计)。
在实际情况中,预测结果和观测结果都有一定的误差,给出的信息都不一定准确,而卡尔曼滤波会将两者融合,充分利用已有信息得出更加准确的结果,得出的结果称为后验估计。
1.先验估计原理
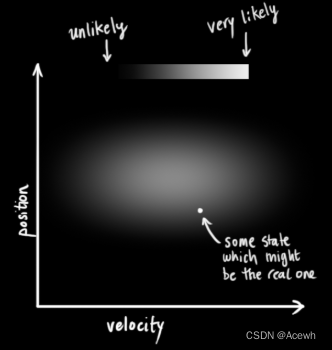
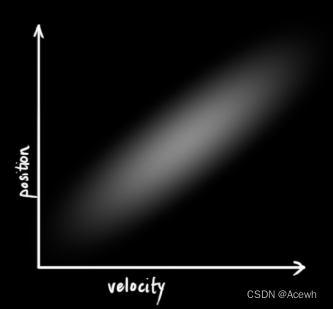
现在只考虑汽车有两个状态变量信息,在某一时刻它的速度是v,位置是p,用一个向量表示为:
如图1所示,实际上我们并不能获得汽车准确的速度velocity与位置position,它们之间会有很多组合,卡尔曼滤波算法认为它们都服从一个高斯分布,每个变量都有一个均值μ与方差。图1中越暗表示变量值的概率越低,越亮表示值的概率越高,高斯分布的中心表示p与v的各自的最优估计(即均值μ),用
表示。
如图2所示,表示位置与速度这两个变量不相关,意味着不能由一个变量推出另一个变量的值。如图3所示,表示位置与速度这两个变量相关,意味可以由一个变量推出另一个变量的值。变量间的相关性用协方差矩阵表示,矩阵中每个元素表示第i个和第j个状态变量之间的相关度。
 | 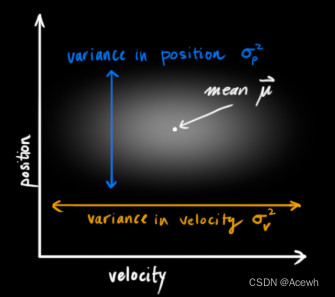 |  |
| 图1 高斯分布变量 | 图2 不相关变量 | 图3 相关变量 |
(1)当前时刻的状态
在只考虑汽车p与v两个变量时,在时刻 k 的状态(p与v最佳估计)与协方差矩阵可表示为:
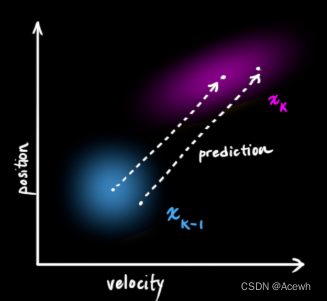
(2)预测下一时刻状态
如图4所示,根据汽车当前时刻(k-1)的状态,来预测下一时刻(k)的状态,预测函数并不在乎所有预测结果中哪些相对准确,哪些不准确,它会对所有的可能性预测,给出一个新的高斯分布。
 |  |
| 图4 前后时刻变量的高斯分布 | 图5 前后时刻的状态转移 |
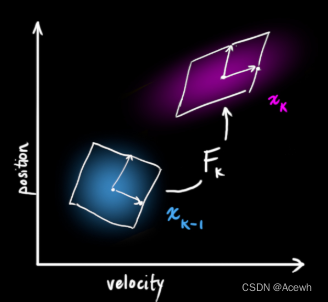
如图5所示,预测函数需要某种规律将汽车从 k-1 时刻的状态变为 k 时刻的状态,而这个规律被称为状态转移矩阵。汽车在做匀速运动时,其位置与速度的变化关系为:
所以下一时刻的状态用矩阵形式表示为:
根据协方差性质,下一时刻的协方差矩阵为:
(3)外部控制
汽车在运动过程中并不总是匀速运动,假设汽车某个时刻的加速度是a,那么下一时刻位置与速度的变化关系为:
所以下一时刻的状态用矩阵形式表示为:
为状态转移矩阵;
为状态控制矩阵,表明对小车如何加速减速;
为状态控制向量,表明控制的力度大小和方向。
(4)外部影响
汽车在行驶过程中不免受到风速、路况等外部不确定因素的影响,假设这些因素同样服从高斯正态分布,则汽车下一时刻状态完整预测公式为:
(1)
(2)
一般情况下假设=0即可,明确不为0时再根据实际情况设置。
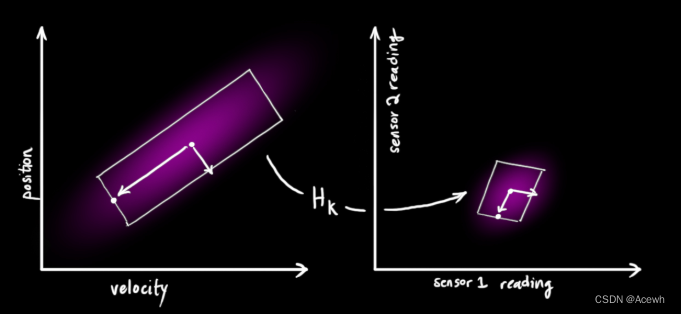
(5)根据原始观测结果修正预测结果
汽车当前状态的原始预测结果 与 传感器给出的观测结果 虽然都有一定的误差,但它们都多多少少给出了汽车当前时刻的信息,两者之间具备某种特定关系,如图6所示,左边为原始预测结果的高斯分布,右边为观测结果的高斯分布,它们的特定关系用矩阵表示。
最后得出的预测结果为:
2.后验估计原理
(1)观测结果和实际结果的关系
实际中,汽车下一时刻真实的状态称为实际结果,传感器给出的观测结果与实际结果间同样存在不确定性,它同样服从一个高斯分布。
(2)最优估计
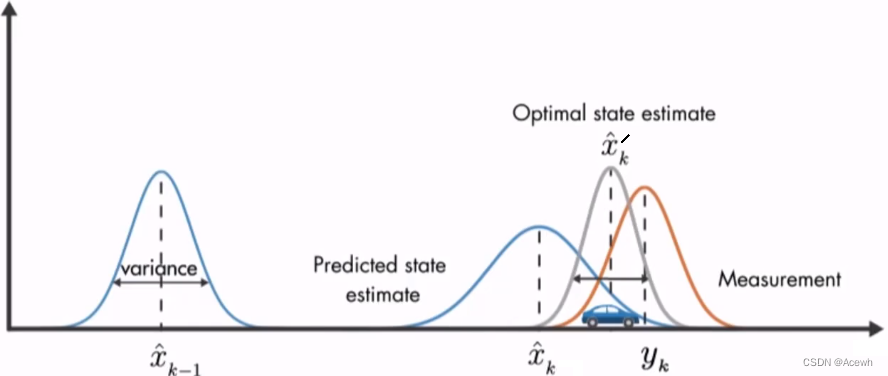
如图7所示,
- 蓝色
表示当前时刻的预测结果:
- 橙色
表示当前时刻的观测结果:
- 它们之间的灰色
便是实际结果的最优估计。
根据高斯分布融合公式:,可得出最优估计
的计算公式为:
(4)
(5)
(6)
公式 (4) (5) (6) 左乘,公式 (6) 右乘
得:
(7)
(8)
(9)
3.总结
根据1和2的内容,简化公式 (1) (2) (7) (8) (9) 得出卡尔曼滤波最终的计算公式为:
预测:
更新:
| x | 系统状态 | F | 状态转移矩阵 | |
| B | 状态控制矩阵 | u | 状态控制向量 | |
| P | 变量协方差矩阵 | Q | 噪声对原始预测结果造成的协方差矩阵 | |
| K | 卡尔曼增益 | H | 原始预测结果与观测结果的关系矩阵 | |
| z | 观测结果 | R | 噪声对观测结果造成的协方差矩阵 |
注意:实际中可以不断调整Q和R来得出最好的效果。
三.示例
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
# 时间设置
delta_t = 0.1 # 每秒钟采一次样
end_t = 8 # 时间长度
time_t = end_t * 10 # 采样次数
t = np.arange(0, end_t, delta_t) # 设置时间数组
# 卡尔曼滤波矩阵设置
X = np.mat([[0], [0]]) # 系统初始状态
P = np.mat([[1, 0], [0, 1]]) # 状态协方差矩阵
A = np.mat([[1, delta_t], [0, 1]]) # 状态转移矩阵
B = [[1 / 2 * (delta_t ** 2)], [delta_t]] # 状态控制矩阵
u = 1 # 状态控制向量
H = np.mat([1, 0]) # 原始预测结果与观测结果关系矩阵(观测矩阵)
# 真实结果
x = 1 / 2 * u * t ** 2
# 测量结果
v_var = 1 # 测量噪声的方差
v_noise = np.round(np.random.normal(0, v_var, time_t), 2)
v = np.mat(v_noise) # 定义测量噪声
z = x + v # 定义测量结果
X_mat = np.zeros(time_t) # 初始化记录系统预测优化值的列表
def KF(X,P,Q,R):
for i in range(time_t):
# 预测
X = A * X + np.dot(B, u) # 估算状态变量
P = A * P * A.T + Q # 估算状态误差协方差
# 更新
K = P * H.T / (H * P * H.T + R) # 更新卡尔曼增益
X = X + K * (z[0, i] - H * X) # 更新预测优化值
P = (np.eye(2) - K * H) * P # 更新状态误差协方差
# 记录系统的预测优化值
X_mat[i] = X[0, 0] # 第一个状态:位置
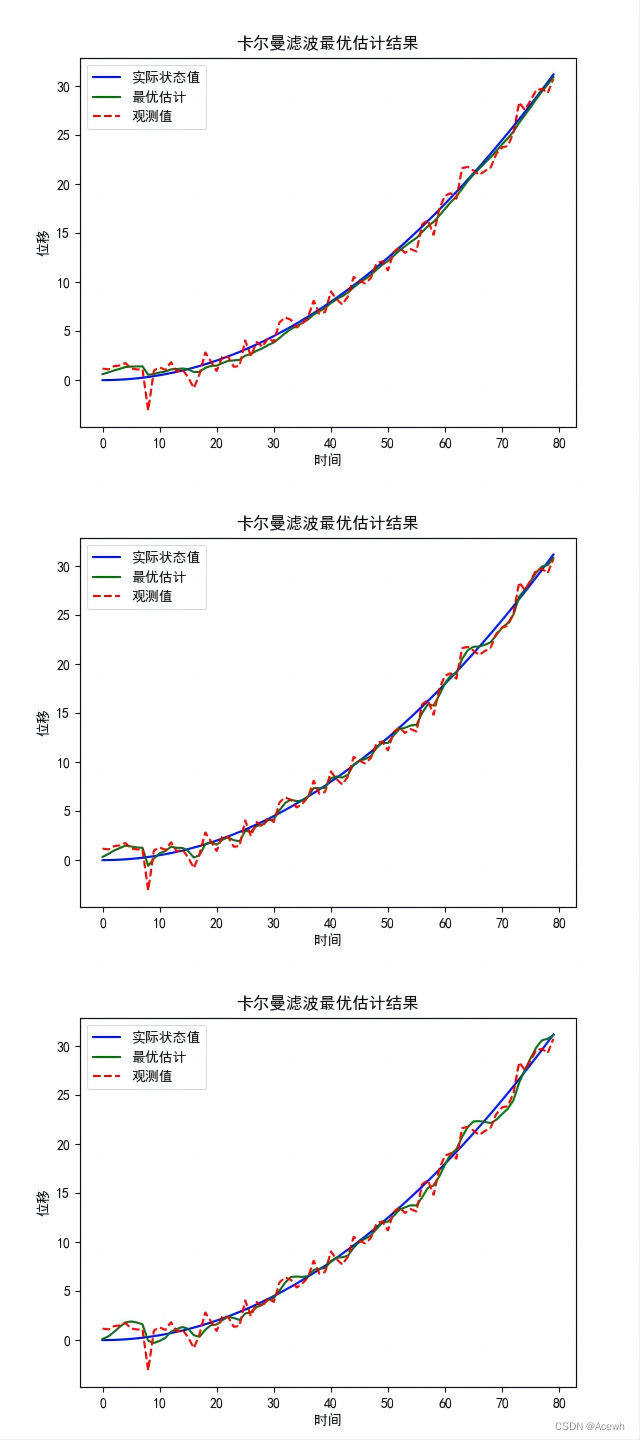
plt.plot(x, "b", label='实际状态值') # 设置曲线数值
plt.plot(X_mat, "g", label='最优估计')
plt.plot(z.T, "r--", label='观测值')
plt.xlabel("时间")
plt.ylabel("位移")
plt.title("卡尔曼滤波最优估计结果")
plt.legend()
plt.show()
if __name__ == '__main__':
Q1 = np.mat([[0.001, 0], [0, 0.001]]) # 预测噪声 协方差矩阵
R1 = np.mat([1]) # 观测噪声 协方差矩阵
Q2 = np.mat([[10.001, 0], [0.5, 0.001]])
R2 = np.mat([30])
Q3 = np.mat([[0.001, 0.05], [10, 0.001]])
R3 = np.mat([10])
# 不同QR的KF结果
KF(X,P,Q1,R1)
KF(X,P,Q2,R2)
KF(X,P,Q3,R3)