SLAM 十四讲(第一版)各章方法总结与理解
总结十四讲中各章各步骤提到的各种方法,以及具体方法在哪个 c++ 库中可以调用。目的在于能更直观地了解 slam 过程各步骤到底在做什么,以及是怎么联系在一起的。
2. 初识 SLAM
- SLAM(Simultaneous Localization and Mapping):同时定位 + 建图
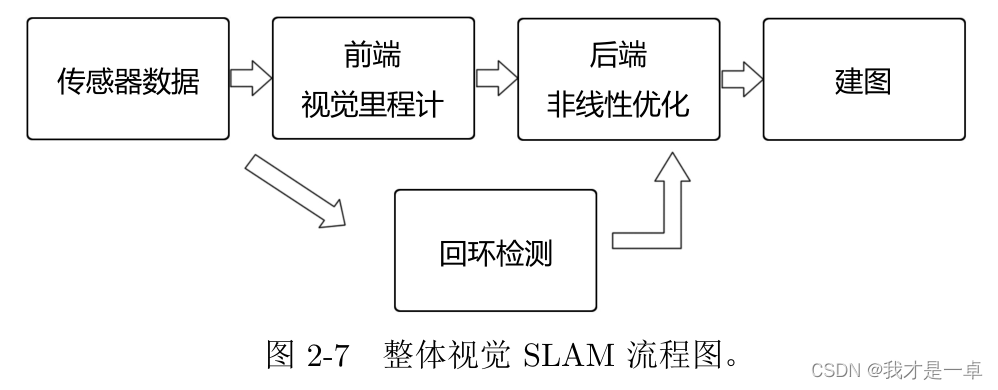
- 前端/视觉里程计 (Visual Odometry, VO):视觉里程计任务是估算相邻图像间相机的运动,以及局部地图的样子。
- 后端优化(Optimization):后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。
- 回环检测(Loop Closing):回环检测判断机器人是否曾经到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。
- 建图(Mapping):它根据估计的轨迹,建立与任务要求对应的地图。
3. 三维空间刚体运动
- Eigen 库:用于矩阵运算。
4. 李群与李代数(用于非线性优化)
- Sophus 库:用于李代数运算。
5. 相机与图像
- Opencv 库:用于图像操作。
- PCL 库:用于点云操作。
- 现实点到像素点过程,涉及 4 个坐标系
- 世界坐标系点 P -> 相机坐标系点 P’,用到 R,t;
- 相机坐标系点 P’ -> 归一化平面(相机)坐标系点 Pc;
- 归一化平面(相机)坐标系点 Pc -> 去畸变后的坐标;
- 去畸变后的坐标 -> 像素坐标点 Puv,用到相机内参。
6. 非线性优化(前端、后端都会用到)
非线性优化即求解最小二乘问题
-
非线性优化的物理意义:
- 定位:通过估计观测到当前数据时传感器(雷达/相机)的状态(即位姿)实现的。
- 优化定位:优化对传感器的状态估计,即求传感器最可能产生现在观测到当前数据的状态(最大似然估计)。
- 最大似然估计 <== 等价 ==> 最小二乘问题的最优解,所以状态(位姿)估计可以转化为最小二乘/非线性优化问题(通过李群 - 李代数的转换关系)。
- 即状态(位姿)可以通过变换矩阵来描述,然后用李代数来优化求解。
-
非迭代方法(仅能求解简单问题)
- 导数为零法
-
迭代方法(可以求解复杂问题)
- 一阶和二阶梯度法(直观):最速下降法一阶,过于贪心、牛顿法二阶,大问题时计算困难。
- G-N 法(高斯牛顿法 / Gauss-Newton):简单,但特定场景稳定性差可能不收敛,迭代;
- L-M 法(列文伯格-马夸尔特法 / Levenberg-Marquadt):鲁棒性高,但收敛较慢, 迭代;
-
c++ 优化库
- Ceres 库:可用 LM 、 dogleg 方法。
- g2o 库:图优化,可用 GN 、 LM 、 dogleg 方法。
7. 视觉里程计(特征点法)
-
特征点:关键点/Key-point + 描述子/Descriptor,如 ORB 特征/Oriented FAST and Rotated BRIEF = Oriented FAST + BRIEF。使用特征点法估计相机运动时,我们把特征点看作固定在三维空间的不动点。根据它们在相机中的投影位置,通过最小化 重投影误差(Reprojection error) 来优化相机运动。在这个过程中,我们需要精确地知道空间点在两个相机中投影后的像素位置——这也就是我们为何要对特征进行匹配或跟踪的理由。
-
特征匹配:暴力匹配(Brute-Force Matcher) 简单、FLANN(快速近似最近邻) 适用点数多的场景
-
三角测量:估计地图点的深度,OpenCV 的 triangulation 函数。
-
RANSAC(随机采样一致性 / Random Sample Concensus):存在错误数据的场景,代替最小二乘法。
-
估计相机位姿的变化
- 对极几何:知道两组 2D 点信息的场景,需要八对以上的点;
- PnP(Perspective-n-Point):知道 3D 点 + (另一帧图像中对应 2D)点投影位置信息的场景,不需要用对极几何,可以通过更少对的点估计相机位姿,包括 P3P(三对点) 、 DLT(直接线性变换) 、 EPnP(Efficient PnP,OpenCV 库中可用) 、 UPnP 这些线性方法和 BA 法 这一非线性方法。
- ICP(Iterative Closest Point):知道两组 3D 点信息的场景,包括 SVD(奇异值分解,Eigen 库中可用) 这一线性方法和类似 BA 法 的非线性方法。
-
BA 法(光束法平差/捆集调整 / Bundle Adjustment):从视觉重建中提炼出最优的 3D 模型和相机参数(内参数和外参数)。从每一个特征点反射出来的几束光线(bundles of light rays),在我们把相机姿态和特征点空间位置做出最优的调整 (adjustment) 之后,最后收束到相机光心的这个过程。在本讲中具体表示为通过 PnP 方法线性部分的结果作为初始值,同时优化特征点和传感器位姿。其中优化过程可以用 Ceres 和 g2o 这两个库中的 G-N / L-M 等方法。
8. 视觉里程计(直接法)
- 光流法(Optical Flow):只计算关键点,然后用光流法代替计算描述子来追踪特征点的运动,估计相机运动时仍使用“对极几何、PnP 或 ICP 算法”。
- 稀疏光流:计算部分像素运动
- 稠密光流:计算所有像素运动
- LK 光流(Lucas-Kanade):假设 1 - 同一个空间点的像素灰度值,在各个图像中是固定不变的(灰度不变假设);假设 2 - 某一个窗口内的像素具有相同的运动。OpenCV 库中可用。
- 直接法(Direct Method):只计算关键点,然后用直接法计算特征点在下一帧图像中的位置,即用像素灰度信息计算相机运动,不用“对极几何、PnP 或 ICP 算法”,速度更快。在直接法中,我们并不需要知道点与点之间之间的对应关系,而是通过最小化 光度误差(Photometric error) 来求得它们。转为优化问题后可用 ceres 库和 g2o 库。
- 稀疏直接法:只使用稀疏关键点,只能计算稀疏的重构。
- 半稠密(Semi-Dense)直接法:只使用带有梯度的像素点,可以重构一个半稠密结构。
- 稠密直接法:使用所有像素。
- 直接:不计算关键点,直接根据像素灰度差异计算相机运动。
9. 实践:设计前端
- 数据:带有深度信息的、连续的各帧图像数据。
- 初步目标:估计两两帧之间(Pairwise)的相机运动,即无结构(Structureless)的 VO 前端。
- 原理:前一帧作参考(Reference)建立坐标系,当前帧(Current)与其做特征匹配,并估计运动关系。最后加上迭代优化位姿估计。
- 地图:自己实现的地图类,第一帧点全部放入。后续帧来到时优化地图(删除地图不在当前视野中的点、匹配率太低的点、匹配点数少时加入新的点),然后拿出视野内的点和当前帧特征描述子匹配。
- 实现:使用 OpenCV 的 ORB 类实现特征提取和匹配,OpenCV 的 solvePnPRansac 方法实现运动关系的估计, 并以 RANSAC PnP 结果为初值,用 g2o 的 L-M 方法优化位姿运动估计。
- 效果:对于局部的定位和低精度需求,VO 前端已经够用,无需完全的 SLAM。但容易丢失且可能轨迹漂移。
10. 后端1
-
后端的意义:前端视觉里程计能给出一个短时间内的轨迹和地图,但由于不可避免的误差累积,这个地图在长时间内是不准确的。后端就在于构建一个尺度、规模更大的优化问题,以考虑长时间内的最优轨迹和地图。
-
后端的实时性:后端的优化没必要实时地响应前端的图像数据。人们倾向于把前端和后端分开,运行于两个独立线程之中。
-
滤波器方法:马尔可夫性假设(k 时刻状态只与 k −1 时刻状态有关)下的方法。小型场景下更简单。
- 卡尔曼滤波器(KF / Kalman Filter):线性系统使用
- 扩展卡尔曼滤波器(EKF / Extended Kalman Filter):非线性系统使用
- 局限:无法处理回环场景、线性近似可能只在很小范围内成立、大型场景算力要求更高
-
非线性优化方法:依然考虑 k 时刻状态与之前所有状态的关系。
- BA 和图优化:需要做的主要是构造 Bundle Adjustment 问题,设置 Schur 消元,然后调用稠密或者稀疏矩阵求解器对变量进行优化即可。
11. 后端2
- 位姿图(Pose Graph)优化:只优化相机位姿,抛弃特征点。节点是相机位姿,边是两个位姿节点之间相对运动的估计。使用 g2o 库完成位置图的优化。
- 因子图(Factor Graph)优化:由表示优化变量的变量节点,以及表示因子的因子节点组成。其过程为调整各变量的值,使它们的因子之乘积最大化。
12. 回环检测
- 回环检测的意义
- 给出除了相邻帧之外的,一些时隔更加久远的约束,消除长期的累计误差,保证轨迹和地图全局一致(Global Consistent)。
- 可用于进行重定位。
- 基于里程计的几何关系(Odometry based):里程计回到相近位置时认为形成回环。但里程计可能不准,累计误差大时失效。
- 基于外观(Appearance based):根据两张图像的相似度确定回环。
- 词袋模型(BoW/Bag-of-Words):用“图像上有哪几种特征”来描述一个图像
- 字典:包含许多图像概念的单词,其生成问题类似一个聚类问题。
- K-means(K 均值):用于聚类,生成字典
- K 叉树:用于表达字典,类似于层次聚类,是 k-means 的直接扩展。叶子层是单词,中间节点用于快速查找。
- DBoW3 库:DBoW3::Vocabulary 对象用于生成字典、计算图像之间描述向量的相似度
13. 建图
- 单目稠密重建
- 立体视觉
- 极线搜索:在极线上搜索上一帧图片中的关键点位置
- 块匹配:在极线上进行块匹配来搜索关键点,常用SAD(差的绝对值之和 / Sum of Absolute Difference)、SSD(平方和 / Sum of Squared Distance)、NCC(归一化互相关 / Normalized Cross Correlation)
- 高斯分布的深度滤波器:用于优化不同帧图片中同一个点的深度估计,计算量小。
- RGB-D 稠密重建
- 点云地图(Point Cloud Map):可用 PCL 库实现
- 八叉树地图:导航常用、压缩性能较好、可灵活更新,可用 Octomap 库实现






![[POJ - 1080 ]Palindrome(区间DP)](https://img-blog.csdnimg.cn/772408e7a50247568aed3012fcf6d6e2.png)